



图4-44 传送带模型
一个传送带包含多个分段面板,并沿着轨道移动,如图4-44所示。
本练习将应用以下技术:
● 函数表达式
● 修改结果图解
项目描述
目标是驱动传送机以0.62m/s的速度运动,使用的力受一个函数控制。在练习的第一部分,将以一个作用力移动传送带。在第二个部分,这个力将被沿一个路径的运动替代。
操作步骤
步骤1 打开装配体文件
从文件夹“SolidWorks Motion Simulation\Lesson04\Exercises\ConveyorBelt”下打开文件“Con-veyor_Belt”。
步骤2 查看装配体
该装配体含有所有让传送带正确运转所需的配合。在转轮和闭环的传动带路径之间存在很多【凸轮】配合来建立相切的条件。
提示
SolidWorks Motion也支持其他SolidWorks的高级配合,例如齿轮配合和限制配合。
步骤3 确认单位
确认文档单位为【MKS(米、公斤、秒)】。
步骤4 创建一个运动算例
新建一个运动算例,命名为“Conveyor”。
步骤5 应用一个力
在Plate-1上创建一个力作为开始,模拟加载的作用力推动传送带上的面板。在Plate-1上应用一个大小为100N的【常量】、【只有作用力】的力,如图4-45所示。确保力的方向和图中显示的一致,而且它的方向必须参考同一面板(即力的方向必须随面板移动而改变)。
步骤6 运动算例属性
设置【每秒帧数】为“100”,选择【GSTIFF】积分器。
步骤7 运行仿真
设置算例持续时间为5s。
步骤8 图解显示Plate-1的速度
传送带面板的速度呈线性递增,如图4-46所示。现在要维持传送带面板以0.62m/s的速度匀速运动。
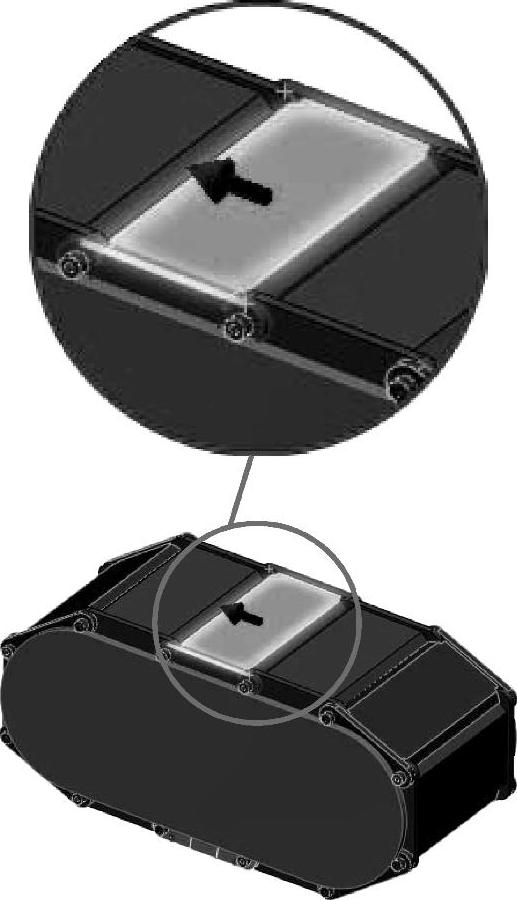
图4-45 定义力
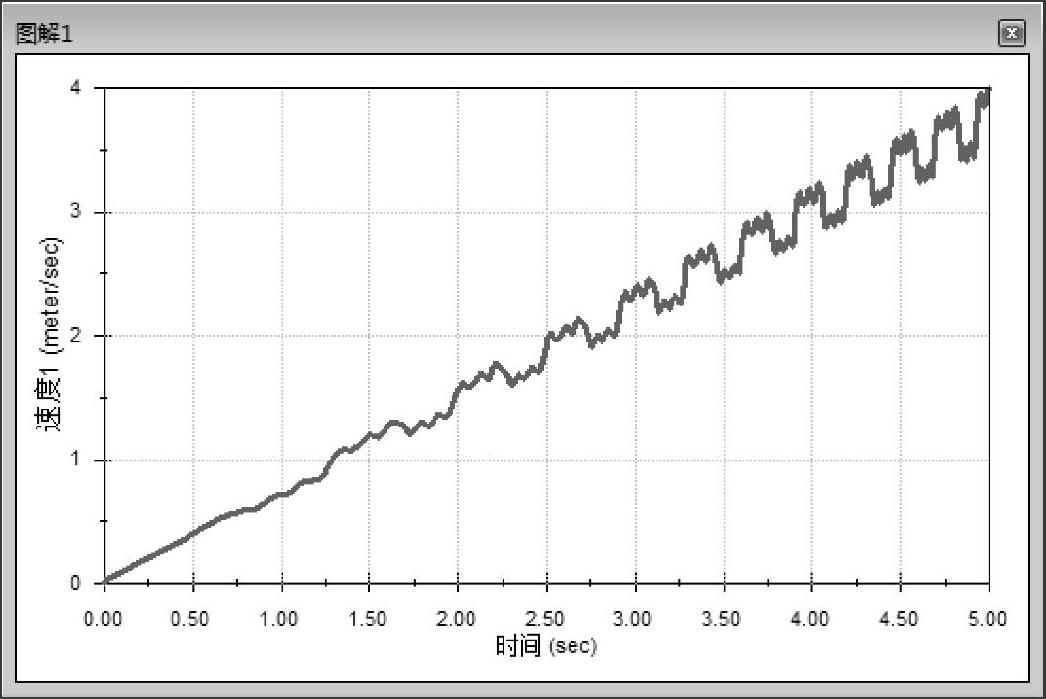
图4-46 查看图解(一)
提示
更改力的定义,使之随传送带实际速度与期望传送带速度之差的函数而变化。基于这个速度差,力的大小及方向将根据下列表达式来加速或减速传送带:
力=增益值×(预期速度-当前速度)=增益值×(0.62-当前速度)
如果当前速度低于预期速度时,将加载一个正的作用力以加速传送带。如果当前速度高于预期速度时,将加载一个负的作用力以减速传送带。增益值则用于控制加速或减速传送带的力。
步骤9 修改力
将力的大小从常量100N修改为下面的函数表达式“100∗(0.62-{Velocity1})”,如图4-47所示。
提示
为了将{Velocity1}特征输入到【表达式】域中,可以在【运动算例结果】列表中双击【Velocity1】特征。
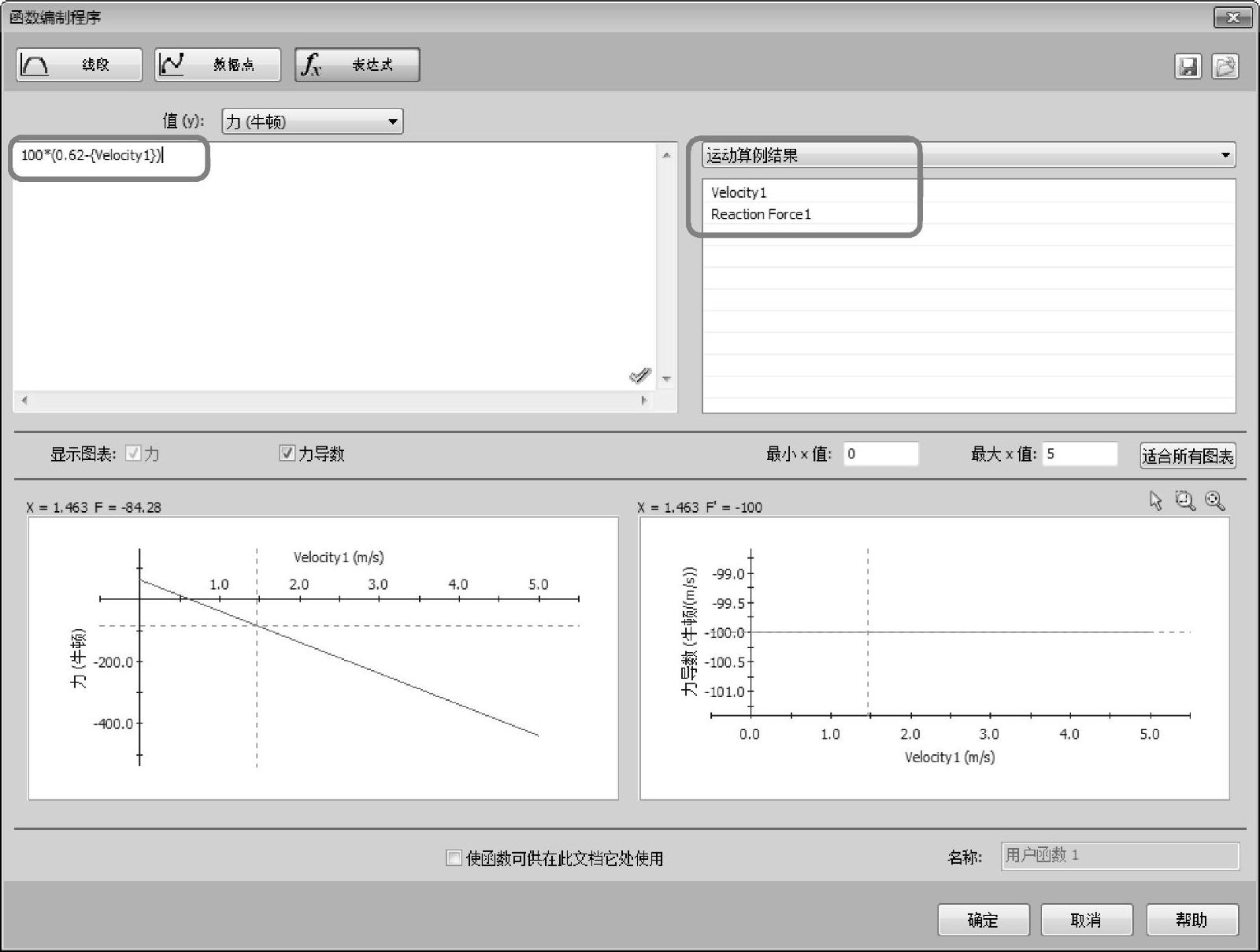
图4-47 修改力
步骤10 运行仿真
步骤11 查看图解
图解显示速度维持在了0.62m/s,但这来得太晚,如图4-48所示。我们将提高增益值来缩短达到预期速度的时间。
步骤12 修改力
编辑力并更改方程式为“500∗(0.62-{Velocity1})”。(https://www.xing528.com)
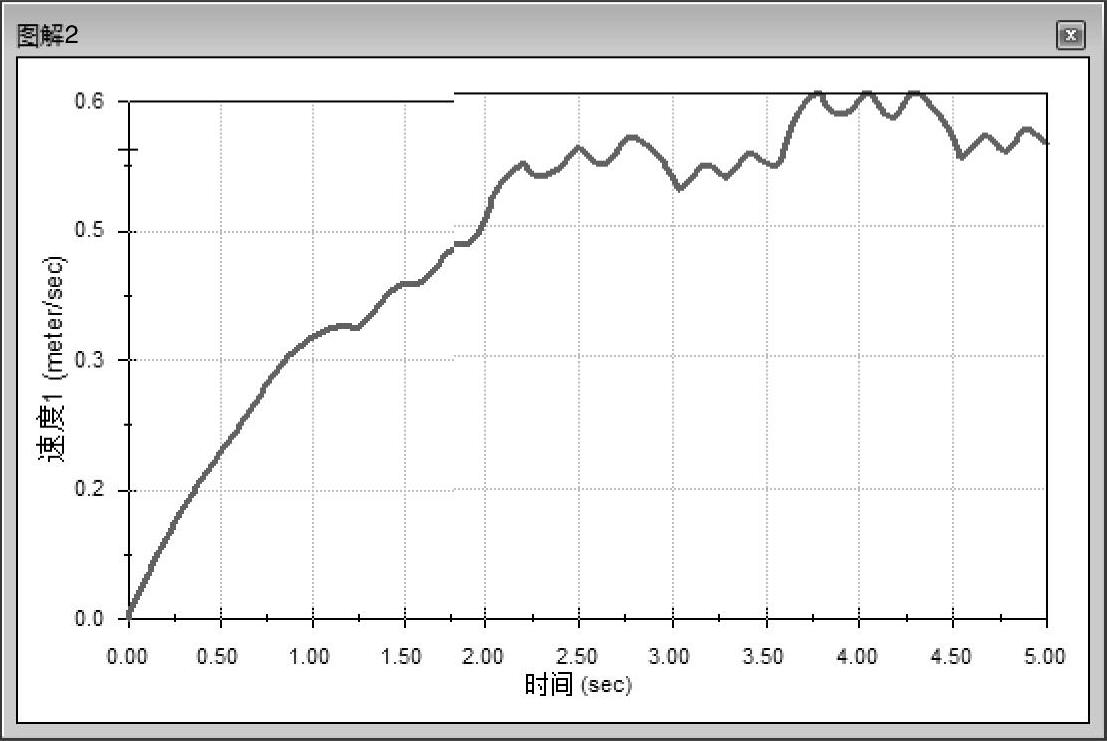
图4-48 查看图解(二)
步骤13 运行仿真
步骤14 查看图解
这一次,传送带用了1s便达到了预期速度,随后在力变化时也保持这个速度。但是速度的变化太大,对制造过程而言是不可接受的,如图4-49所示。此时可以进一步增加增益值来使之更加光滑。
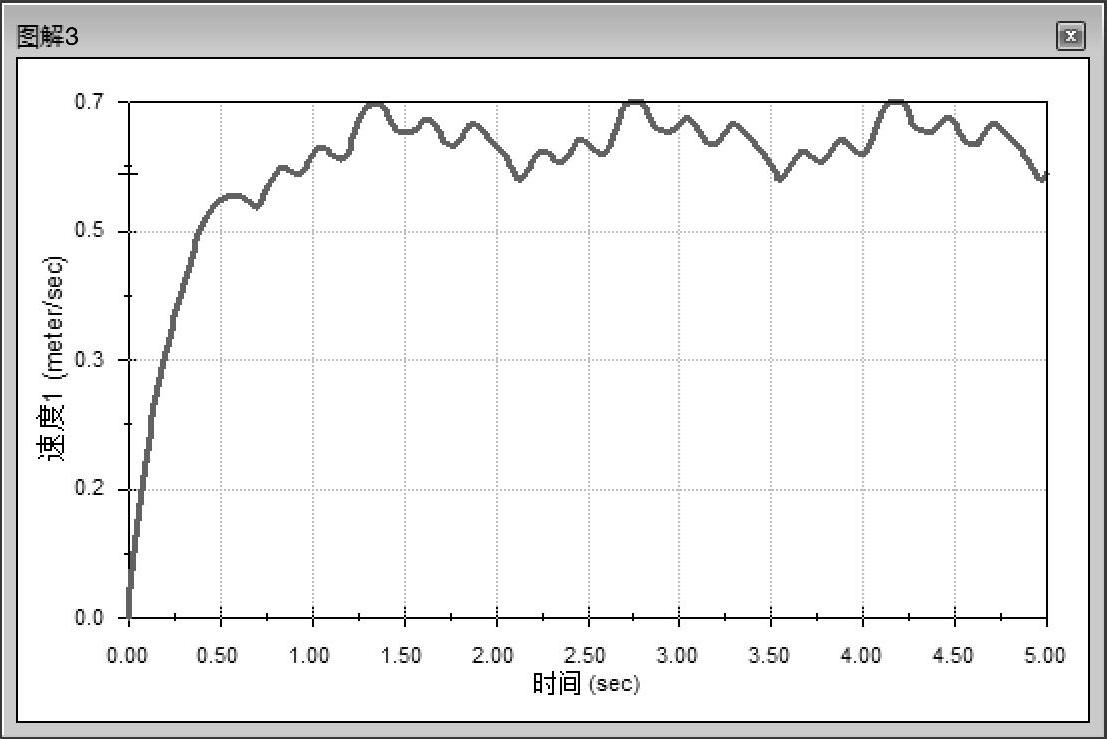
图4-49 查看图解(三)
步骤15 编辑力
再次修改力,使增益值的大小为5000,然后再次运行该分析。
步骤16 查看图解
这次的图解光滑了很多,如图4-50所示。
步骤17 图解显示输入力
可以看到力的初始值非常高,这是为了从初始速度为零开始加速传送带。当传送带达到预期速度0.62m/s时,力的大小降低到趋于零,如图4-51所示。
如果不采用力作为输入,则还有另一种方法可以保证传送带保持匀速,即采用路径配合运动。我们将在本练习的下一部分展示这个方法。
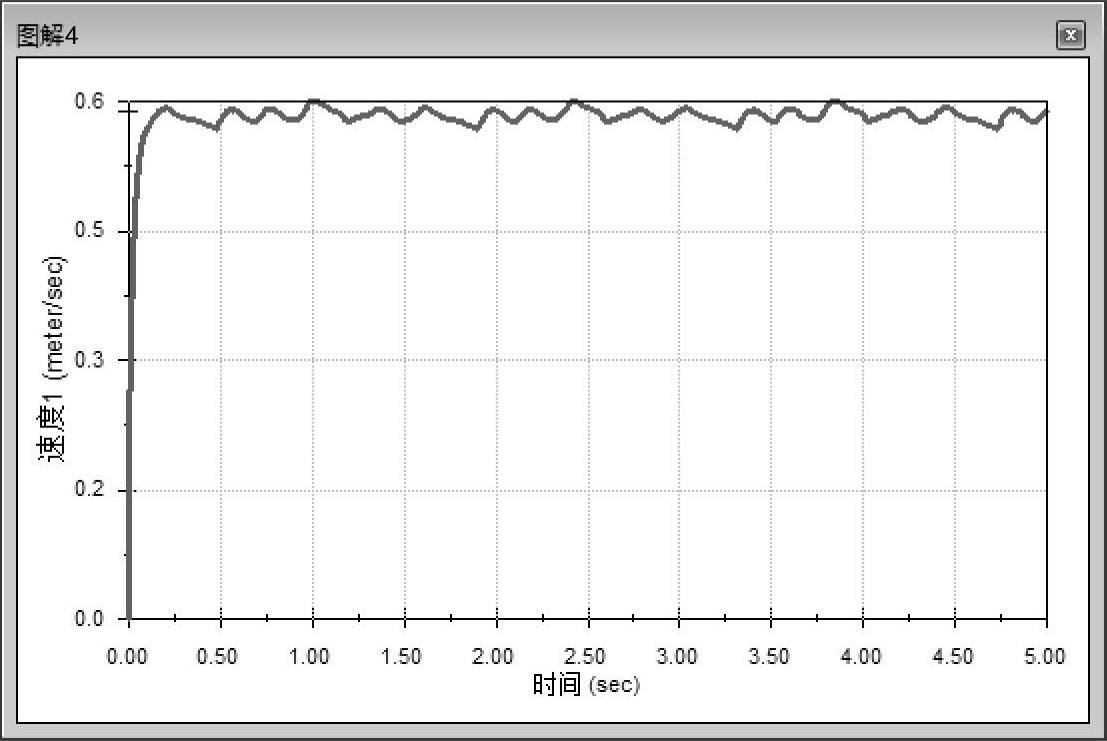
图4-50 查看图解(四)
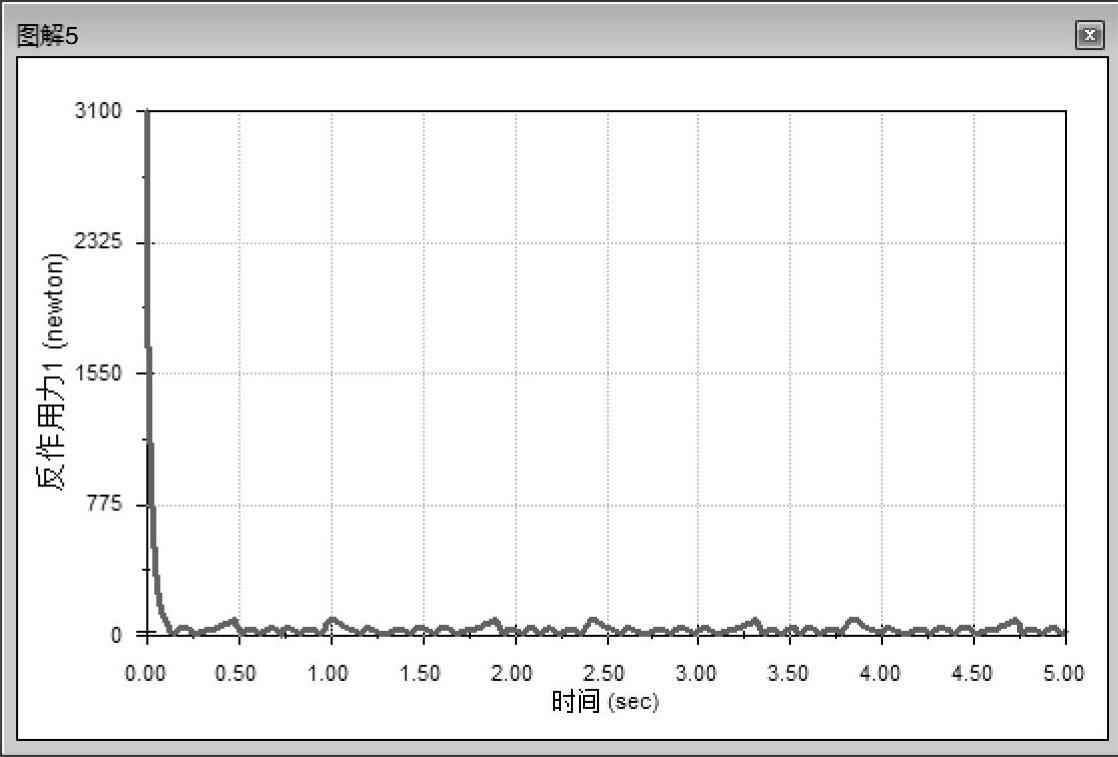
图4-51 查看图解(五)

步骤18 生成一个运动算例
生成一个新的运动算例,命名为Conveyor。
步骤19 路径配合
在加载驱动力的面板上选择其中一个滚轮,删除凸轮配合,如图4-52所示。在SolidWorks特征树中,收起特征Sketch1。在滚轮中心点和由Sketch1确定的路径之间新定义一个路径配合。
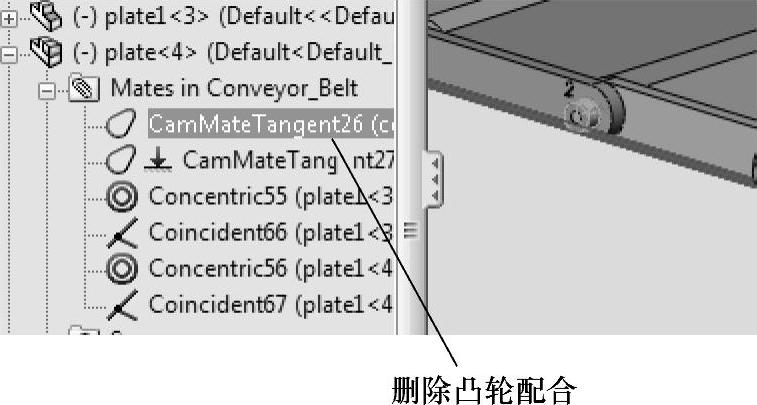
图4-52 路径配合
技巧
为了选择整个草图,单击【SelectionManager】,单击【选择闭环】。选择草图轮廓后单击【确定】按钮。
保持所有路径配合的约束为默认值【自由】,如图4-53所示。
提示
路径配合约束设定为【自由】,是因为装置在余下的凸轮配合特征的作用下是完全约束的。
步骤20 路径配合马达
定义【路径配合马达】,在【路径配合】域中选择上一步中定义的路径配合。确保运动的方向和驱动传送带力的方向一致。
选择【等速】并输入“0.62m/s”,如图4-54所示。单击【确定】按钮。
步骤21 压缩力
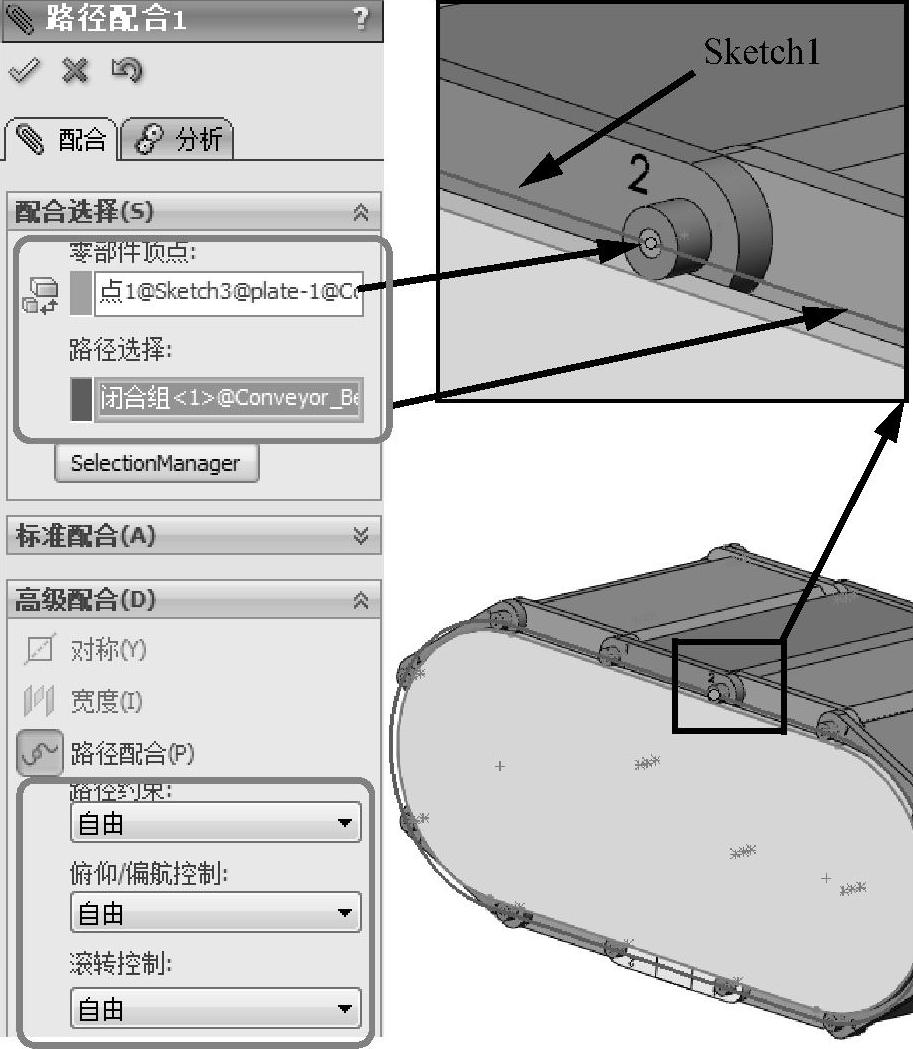
图4-53 定义路径配合

图4-54 定义马达
【压缩】力特征,现在不需要这个特征了,因为运动是由马达驱动的。
步骤22 运行仿真
步骤23 速度图解
这次的图解要光滑许多,如图4-55所示。注意速度是振荡变化的。在步骤20中指定了等速0.62m/s,也希望面板最终的速度也保持不变。
步骤24 保存并关闭文件
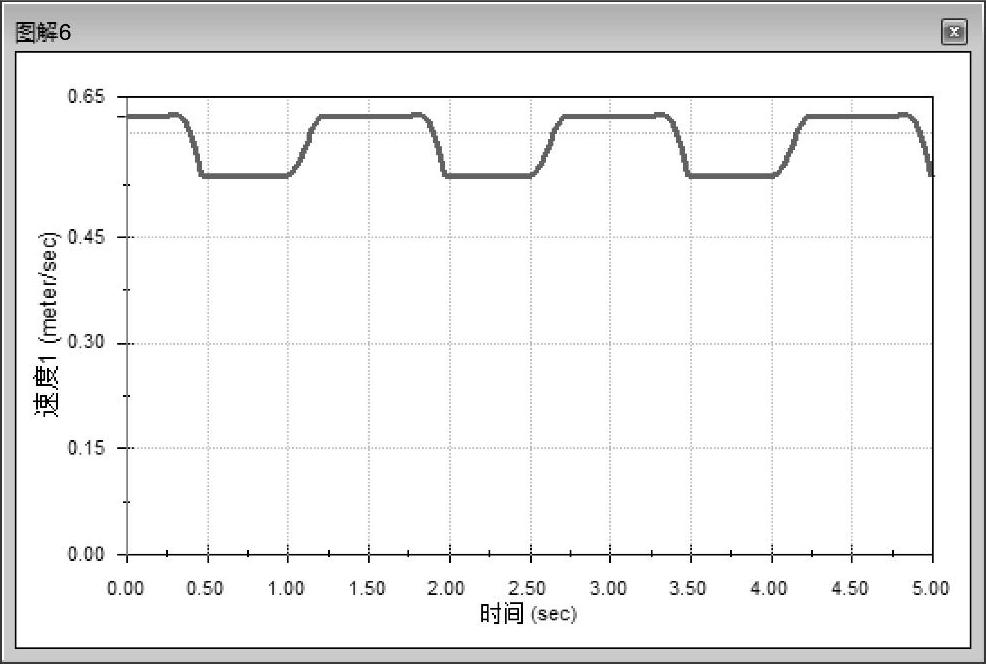
图4-55 查看图解(六)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。