



步进函数表现了在给定数量(例如:位移、速度、加速度或力的大小)的两个数值之间具有光滑过渡。在过渡前后,位移、速度或加速度的大小是常数。
例如,考虑图4-6中的例子,其中:
d0代表位移的初始值。
d1代表位移的最终值。
t0代表开始步长的时间。
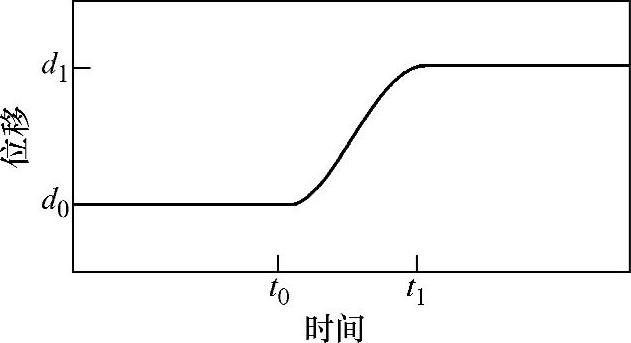
图4-6 步进函数
t1代表结束步长的时间。
步骤8 生成一个旋转马达以驱动弹簧锁
隐藏J_Spring,在MotionManager工具栏中单击【马达】按钮 。在【马达类型】中选择【旋转马达】。在【马达位置】或【马达方向】的任何一个选项中,选择Series Lever的Axis1。这次运动将模拟人手操作Series Lever来进行开锁和闭锁的动作,如图4-7所示。
。在【马达类型】中选择【旋转马达】。在【马达位置】或【马达方向】的任何一个选项中,选择Series Lever的Axis1。这次运动将模拟人手操作Series Lever来进行开锁和闭锁的动作,如图4-7所示。
在【运动】区域选择【表达式】,该命令将开启【函数编制程序】对话框。
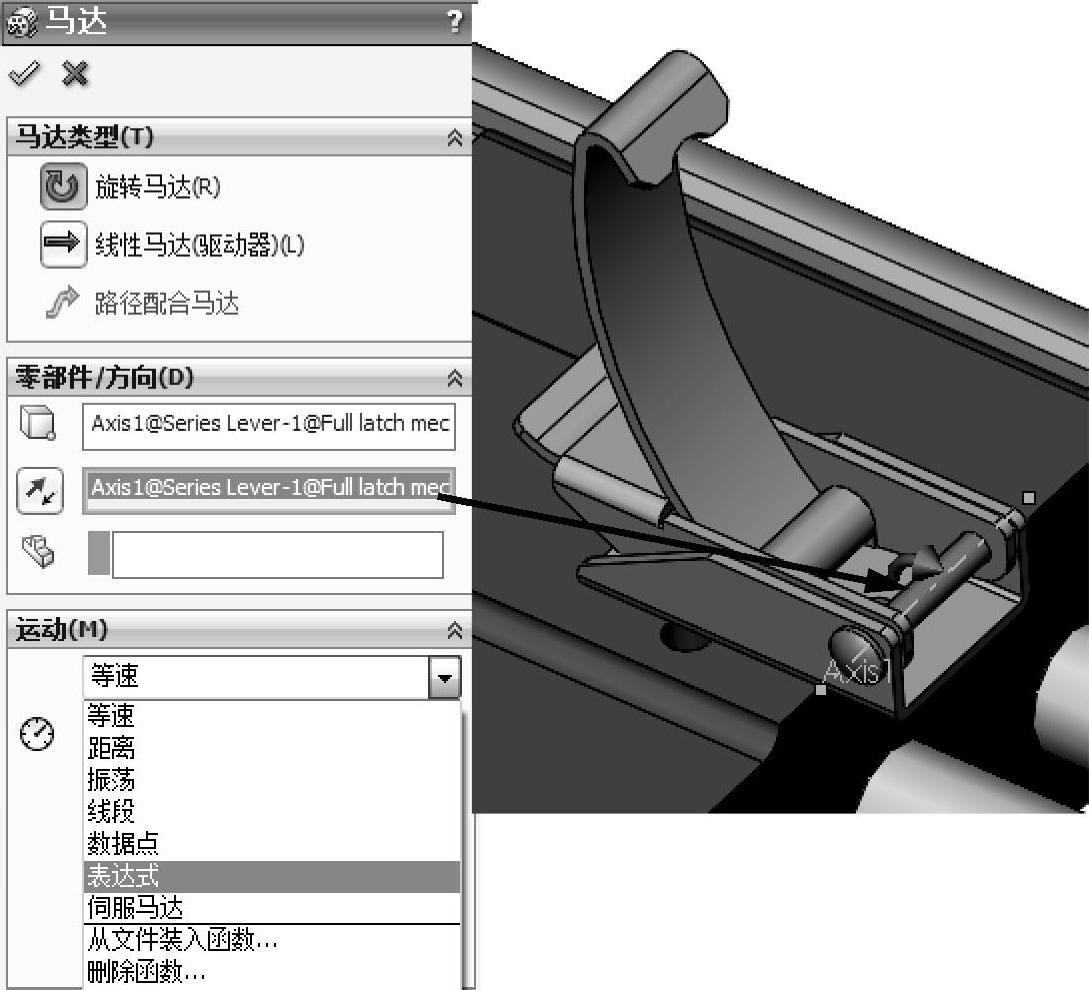
图4-7 定义旋转马达2
步骤9 创建马达表达式
在【函数编制程序】对话框中,确认选择了【表达式】按钮。输入类型处选择【数学函数】,双击【STEP(x,x0,h0,x1,h1)】以插入该步进函数。修改这个函数表达式为【STEP(TIME,0,0D,1,90D)】。
提示
变量TIME可以直接输入,也可以更改输入类型为【变量和常量】并双击【TIME】。
表达式完成的最终形式为STEP(TIME,0,0D,1,90D)+STEP(TIME,1.5,0D,3,-90D)(https://www.xing528.com)
提示
【函数编制程序】对话框将自动更新位移、速度、加速度和猝动的图解,如图4-8所示。
单击【确定】按钮,完成对表达式的定义并关闭【函数编制程序】对话框。单击【确定】按钮,完成对【马达】特征的定义。
提示
上面的表达式组合了两个步进函数。
第一个步进函数将使零部件Series Lever在0~1s转动90°,然后保持竖直的位置0.5s,直到1.5s。
在1.5s处,添加了第二个步进函数,即在1.5~3s将旋转位移改为0。
两个函数及其组合(Series Lever的最终运动)如图4-9所示。
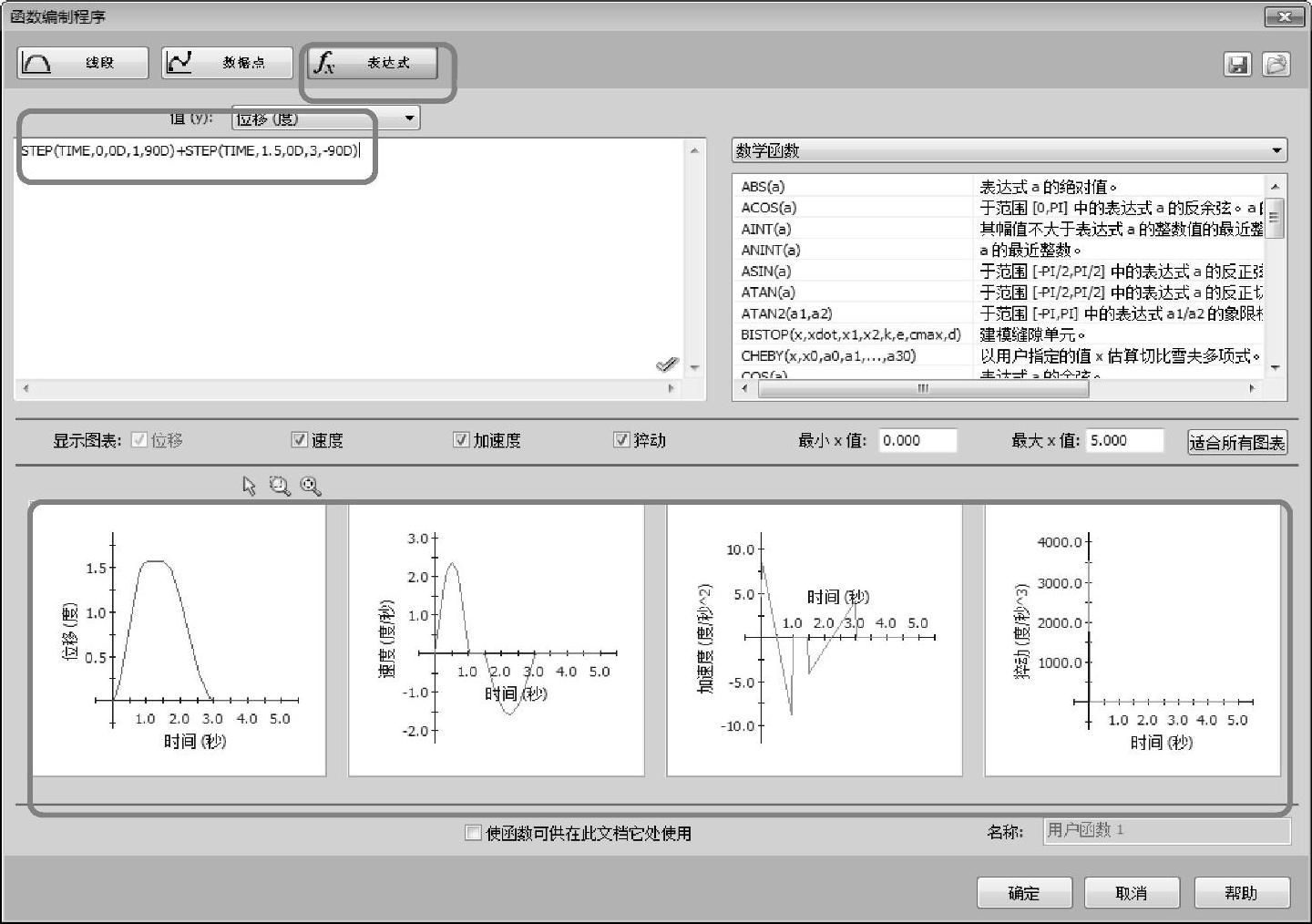
图4-8 【函数编制程序】对话框
步骤10 定义弹簧和阻尼
现在需要定义一个带阻尼的弹簧,以产生拉力将弹簧锁拉紧。在MotionManager工具栏中单击【弹簧】按钮 。选择【线性弹簧】,【刚度系数】设定为“10.00牛顿/mm”,并在图4-10所示的位置创建弹簧。弹簧的自由长度将自动添加到【自由长度】选项中。
。选择【线性弹簧】,【刚度系数】设定为“10.00牛顿/mm”,并在图4-10所示的位置创建弹簧。弹簧的自由长度将自动添加到【自由长度】选项中。
【自由长度】保持其默认值。勾选【阻尼】复选框,指定大小为“0.10牛顿/(mm/秒)”,如图4-10所示。单击【确定】按钮。
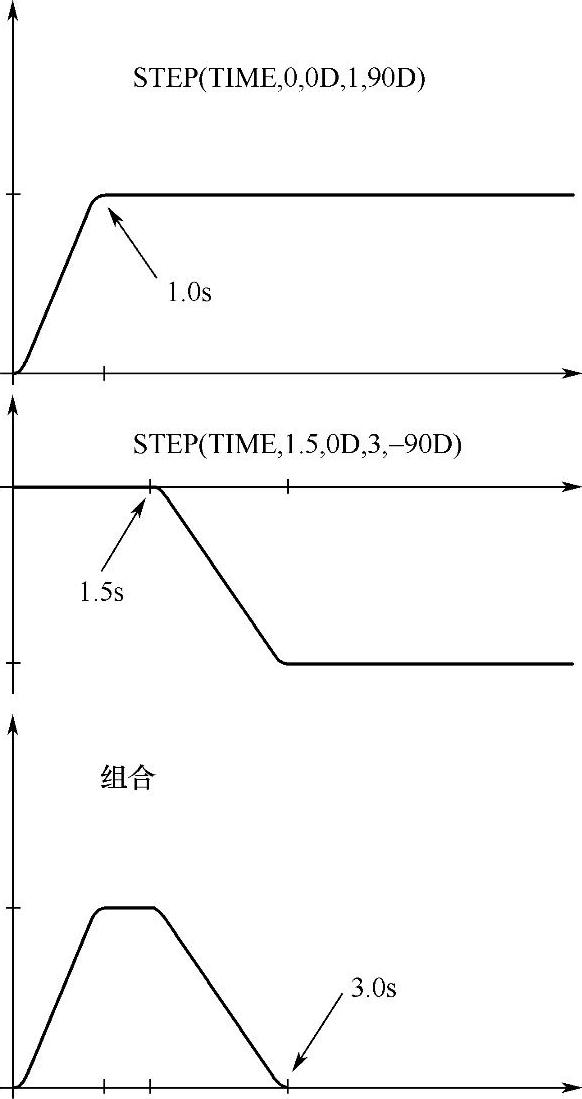
图4-9 步进函数
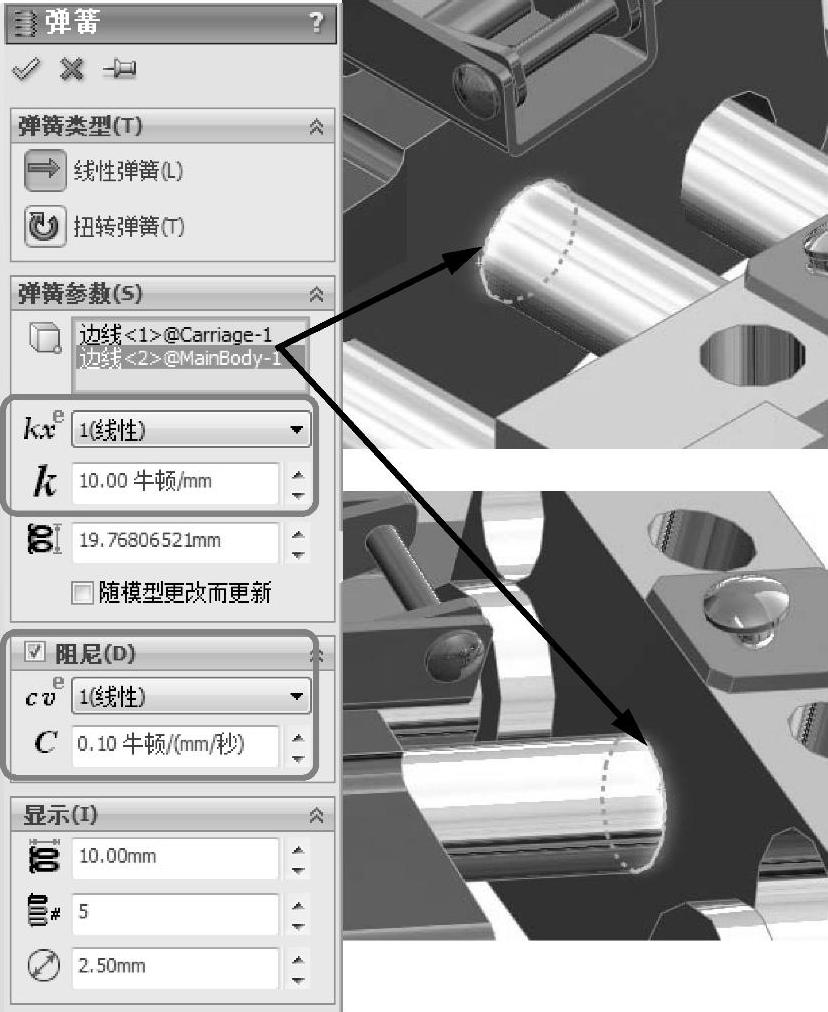
图4-10 定义弹簧和阻尼
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。