



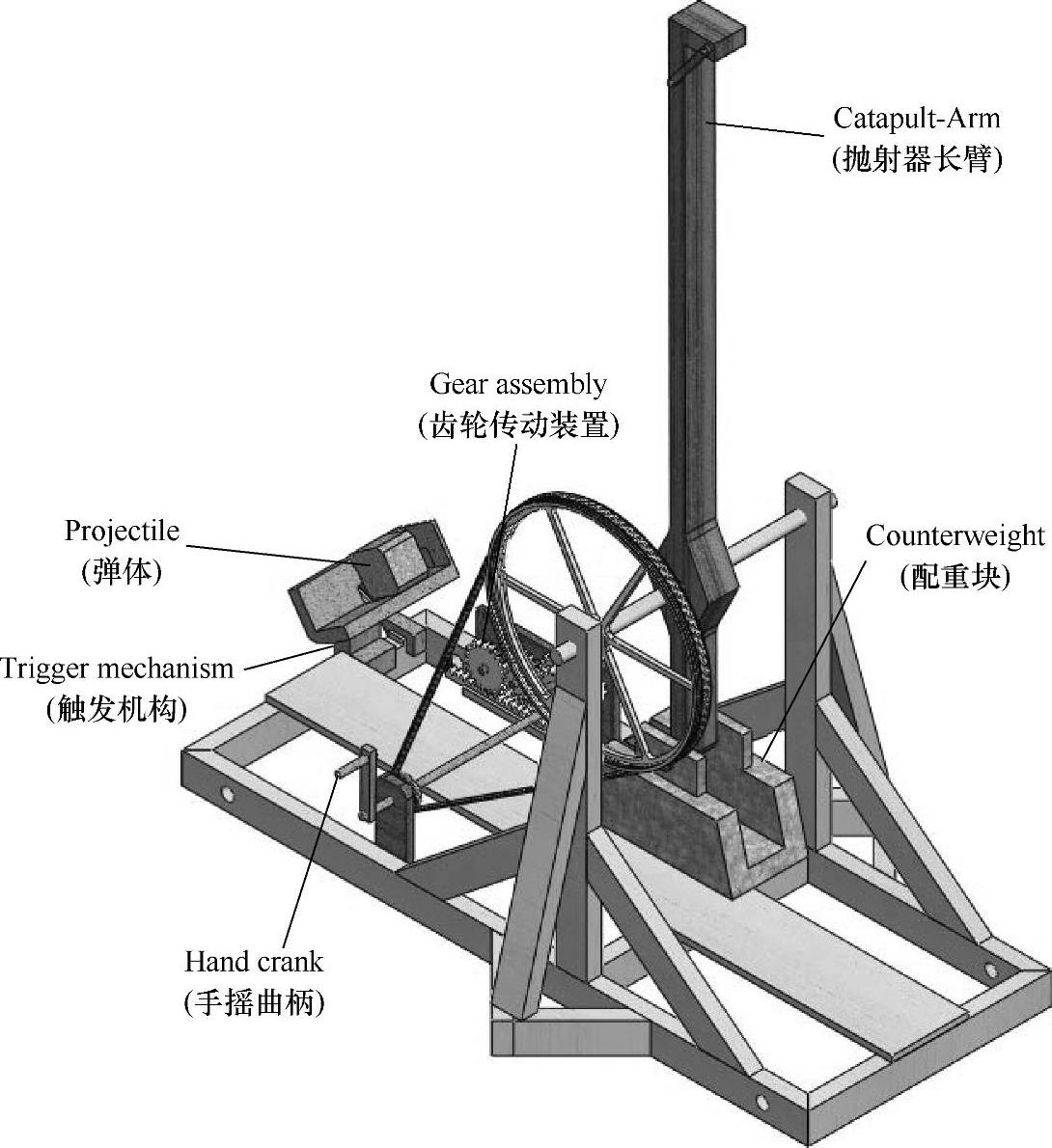
图3-1 抛射器
●建立一个运动算例:这将是一个全新的运动算例。
●应用摩擦:将添加摩擦至已有的配合中。
● 应用接触:将接触添加至动态零部件中。
● 添加一个弹簧:并不需要在运动仿真中使用一个弹簧模型,只需创建一个能从数学上代表弹簧的运动单元。
● 应用引力:抛射器的操作是在标准重力环境下进行的。
● 计算仿真
● 图解显示结果:将创建多个图解,显示所需的力矩和能量。
操作步骤
步骤1 打开一个装配体文件
从文件夹“SolidWorks Motion Simulation\Lesson03\Case Study\Catapult”下打开“Cata-pult-assembly”装配体。
步骤2 检查装配体
曲柄转动可以做两件事,一是通过传动带和带轮转动长臂,二是通过齿轮齿条触发并释放弹体,如图3-2所示。齿轮齿条传动包含6个齿轮和一个齿条,如图3-3所示。当齿条移动时,它将接触到释放机构并提升起零件projectile holder door,如图3-4所示。转动曲柄可以看到这些配合是如何工作的。
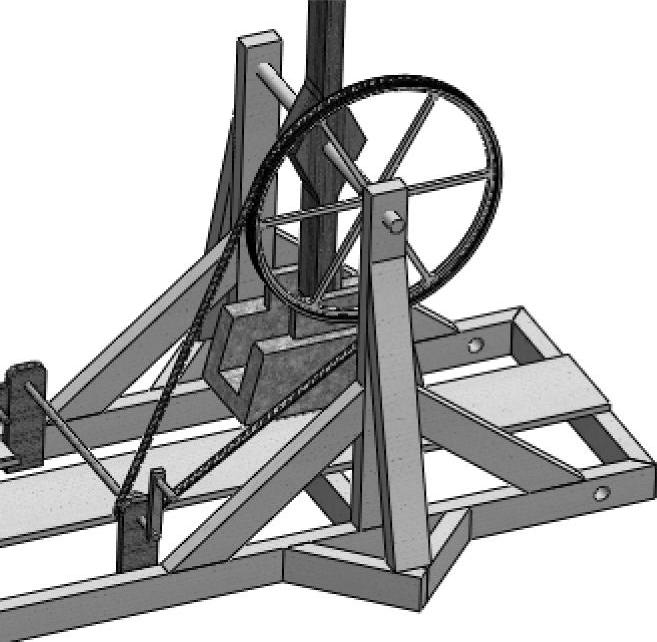
图3-2 模型细节

图3-3 齿轮齿条传动
步骤3 验证文档单位
验证文档单位,应设定为【MMGS(毫米、克、秒)】。
步骤4 建立一个运动算例
右键单击【Motion Study1】选项卡,单击【生成新运动算例】。确定在MotionManager工具栏中,【算例类型】选定为【Motion分析】。
步骤5 添加一个马达
为了转动曲柄,需要在手柄末端添加一个马达。这里希望在3s之内转动曲柄2.75圈。在MotionManager工具栏中单击【马达】。选择曲柄的边线,同时纳入到【马达位置】和【马达方向】选项中,如图3-5和3-6所示。(https://www.xing528.com)

图3-4 齿条接触到释放机构
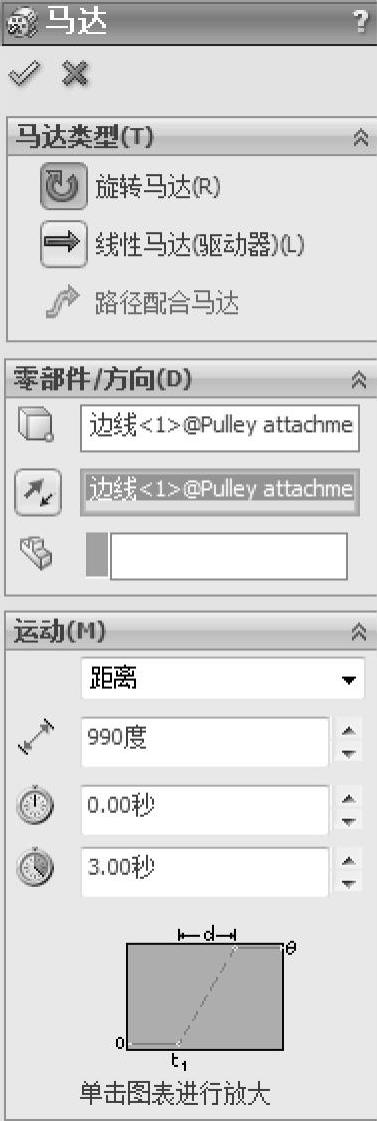
图3-5 定义马达
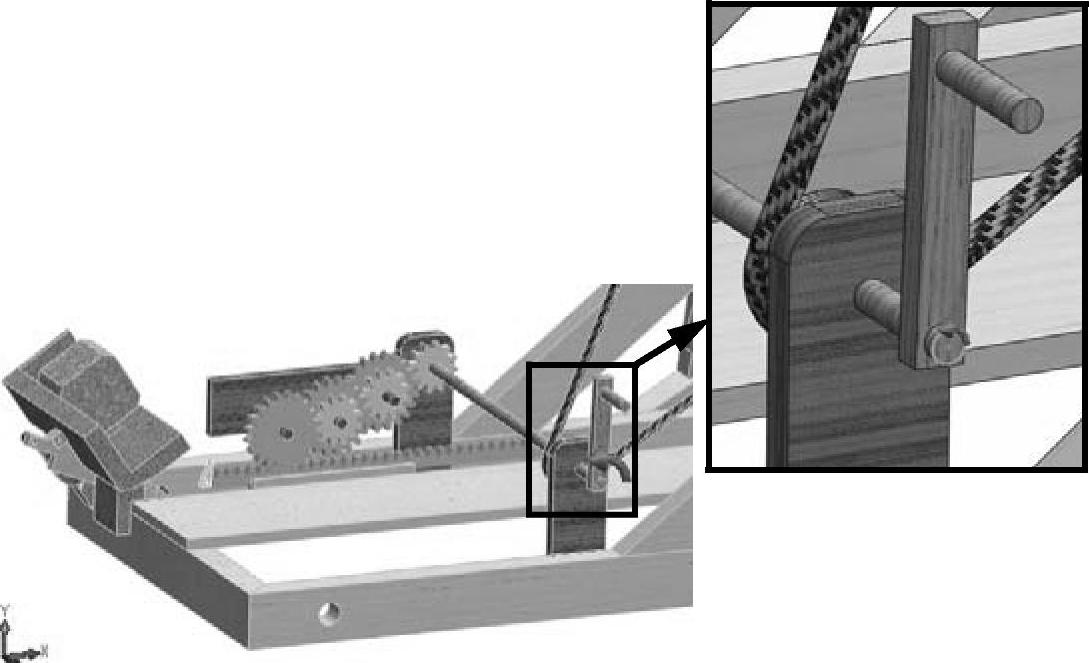
图3-6 局部细节
选择【马达类型】为【旋转马达】,选择【运动】为【距离】。在【位移】中输入“990度”(2.75圈×360°),在【持续时间】中输入“3.00秒”。单击【确定】。
步骤6 禁用马达
在马达转动3s之后,希望它在弹体移至弹匣时保持抛射器处于装填位置。之后需要松开马达,使配重块来驱动抛射器。
整个仿真将运行5s,为了在时间轴上更加容易选择,在MotionManager的右下角单击【放大】 ,直到大于5s的范围覆盖了MotionManager的整个时间轴。
,直到大于5s的范围覆盖了MotionManager的整个时间轴。
在MotionManager工具栏中选择【旋转马达1】。在时间轴的3.4s处单击右键并选择【关闭】。这将在3.4s处生成一个键码来压缩这个马达,使之在之后的时间内不产生任何影响。
技巧
如果用户将此键码放在了错误的位置,只需要将它拖至3.4s处即可。
步骤7 运动算例属性
将【每秒帧数】调至“50”。
步骤8 计算
单击【计算】并观察运动,和预期的一样,马达在3s内转动曲柄2.75圈。从3s到3.4s期间,马达保持曲柄和长臂位置不变,处于准备发射阶段。最终在3.4s时松开曲柄,由于没有明确定义运动,机构开始发生的移动也会超出预期。因此,必须在运动模型中再添加几个关键单元。
步骤9 分析运动
在MotionManager工具栏中,右键单击【视向及相机视图】并单击【禁用观阅键码播放】。切换到主视图,放大装配体的左端。以慢镜头再次播放这个仿真,会发现两个触发器会彼此穿过对方,如图3-7所示。
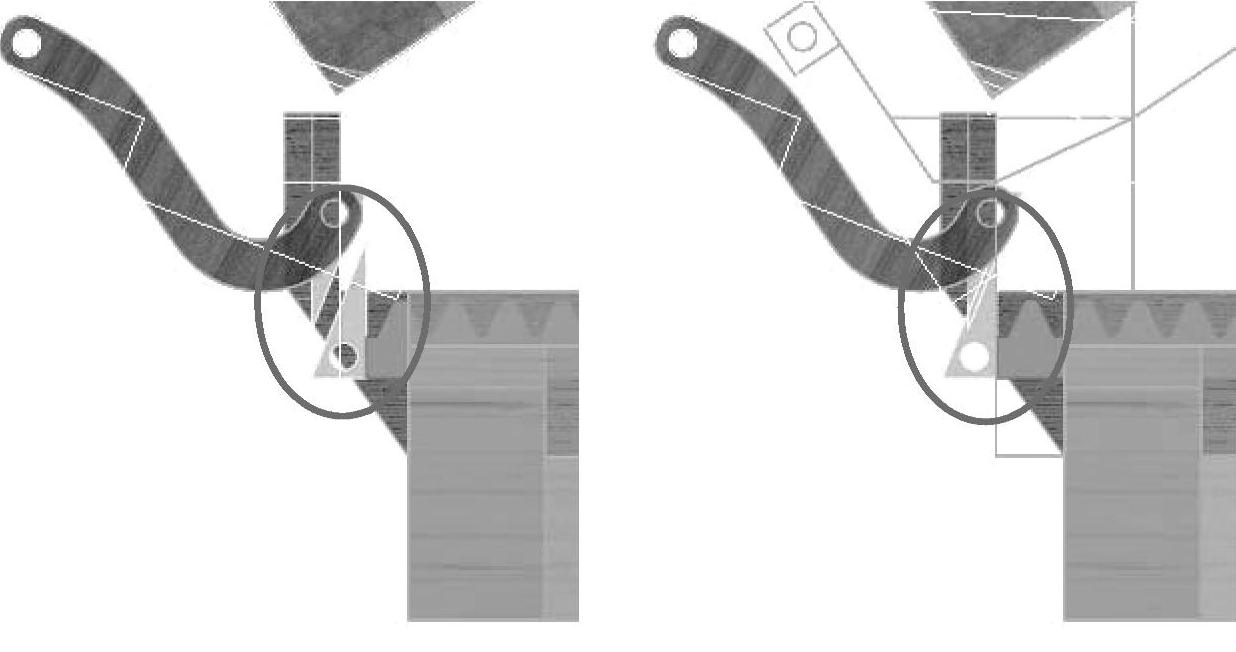
图3-7 模型细节
为了避免发生这种情况,就必须在它们之间添加接触。在定义接触之前,还要介绍一个用于自动检查干涉的特征。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。