



在这个练习中,将使用表格中的数据驱动的马达控制笔式绘图机工作,如图2-64所示。
本练习将应用以下技术:
● 建立本地配合。
● 输入数据点。
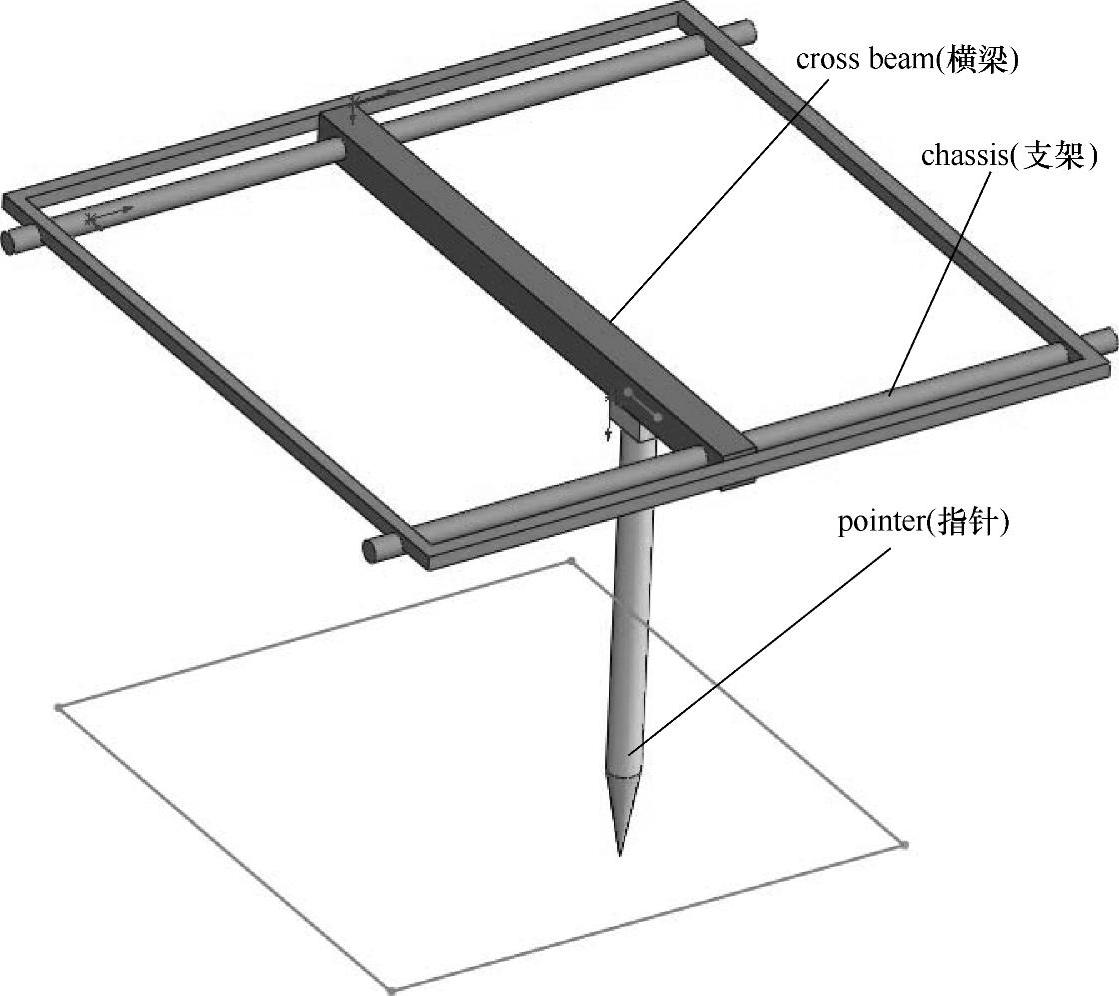
图2-64 笔式绘图机
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson02\Exercises\Trace Path”下的文件“pant1”。
步骤2 设置文档单位
单击【工具】/【选项】/【文档属性】/【单位】,选择【MMGS(毫米、克、秒)】为单位。
步骤3 新建一个算例
新建一个运动算例,确保选择了【Motion分析】。
步骤4 检查装配体
现有的配合允许横梁沿着支架的导轨移动,而且指针可以沿着横梁移动,如图2-65所示。可以防止指针绕横梁转动的这个配合被遗漏掉了。
步骤5 添加旋转马达
为了防止指针转动,将使用一个旋转马达。
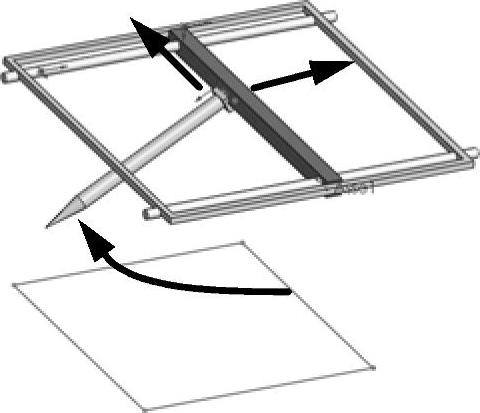
图2-65 检查装配体
选择Pointer下的Axis1为【零部件】。在【运动】中选择【距离】,设定位移为“0度”,并从“0.00秒”变化到“20.00秒”,如图2-66所示。单击【确定】。
步骤6 添加线性马达
第一个线性马达用于驱动横梁沿支架移动。在文件夹“Exercises\Trace Path”下包含两个csv文件:“movx.csv”和“movy.csv”。这些文件包含两组数字,第一组数字代表时间,第二组数字代表位置。
注意,每一组数字中的时间间隔都是非常均匀的。这允许使用Akima插值类型。(https://www.xing528.com)
添加一个【线性马达】,按图2-67所示选择表面。选择【数据点】,打开【函数编制程序】对话框。选择【位移】下的【输入数据】(使用“movy.csv”文件)。单击【确定】。
提示
从坐标轴上可以看到,所选的面会沿着Y方向运动,因此需要使用文件“movy.csv”,而不是“movx.csv”,如图2-67所示。

图2-66 定义马达
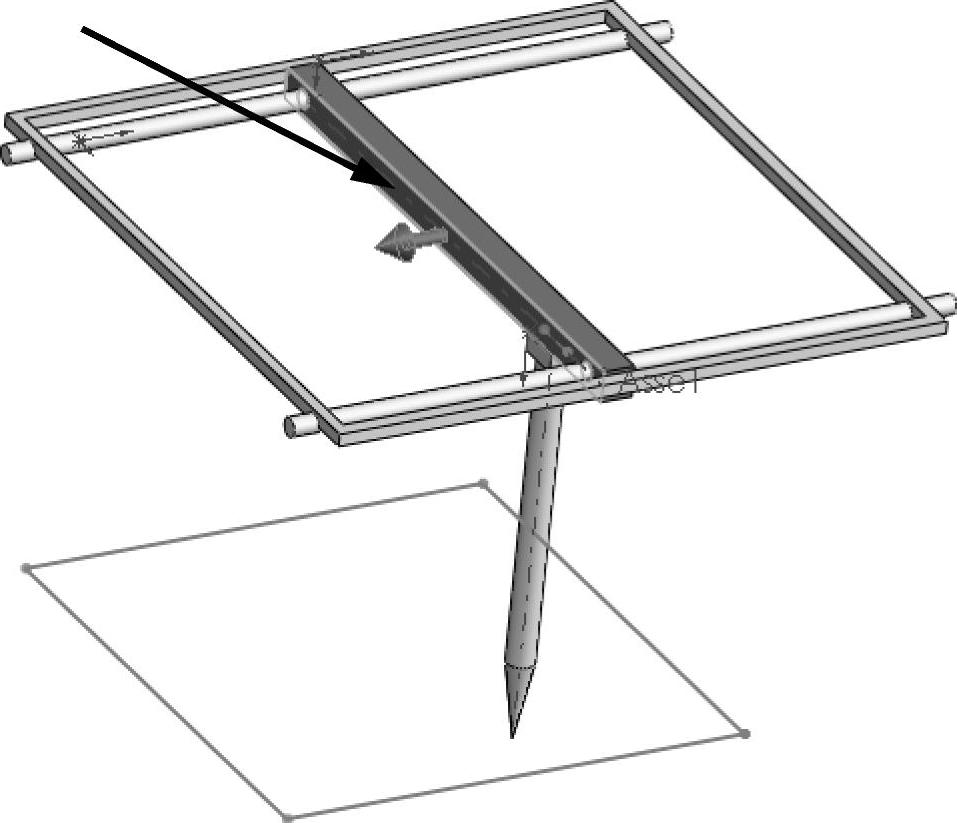
图2-67 选择运动数据
步骤7 添加另一个马达
添加另一个线性马达,使用文件“movx.csv”,驱动指针沿着横梁移动。马达的方向设定为X轴的负方向。
步骤8 运行这个算例
运行这个算例20s。
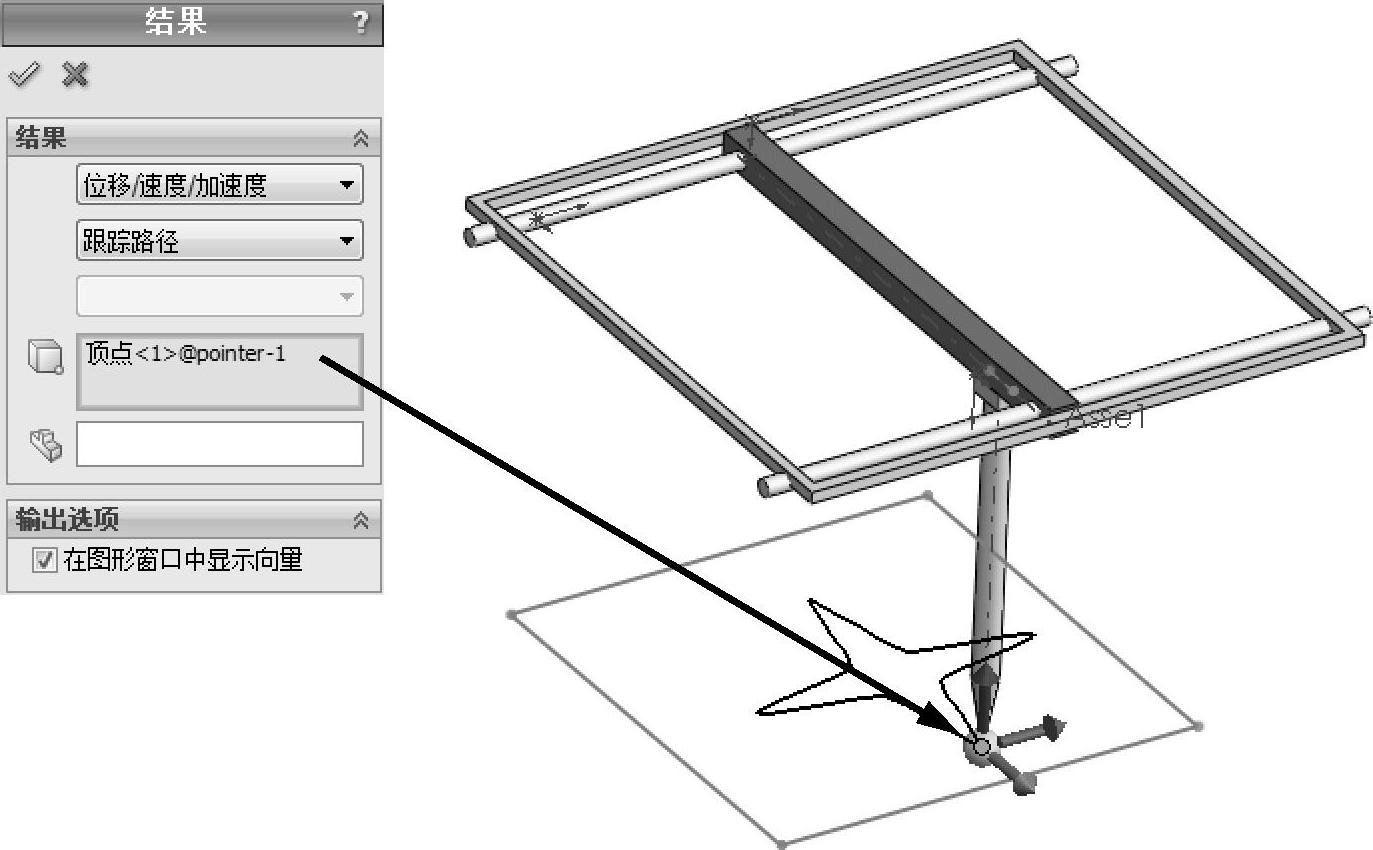
图2-68 定义图解
步骤9 生成绘制轨迹
新建一个结果,选择【位移/速度/加速度】和【跟踪路径】。
选择指针的端点。勾选【在图形窗口中显示向量】复选框,以查看绘出的形状,如图2-68所示。
提示
在第6章中将进一步讨论路径跟踪图解,到时会用于生成凸轮的轮廓。
步骤10 保存并关闭文件
总结
在本练习中,我们分析了一个笔式绘图机。本练习是为了定义本地配合,并输入列表数据来控制马达的数值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。