



生成角位移图解可以用来测量马达、配合、三点或一个零部件相对于另一个零部件的角位移。因为角位移不是一个矢量,因此只能表示大小。
前面的部分介绍了生成一个零部件运动结果图解的方法。在下面的步骤中,将对其他模拟单元(配合、马达等)生成各种后处理的图解。对大多数模拟单元而言,默认的输出坐标系是单元的局部坐标系。
步骤34 配合的角位移
生成一个图解,显示零件Link1和cardian之间铰链配合的角位移。选择【位移/速度/加速度】、【角位移】、【幅值】来定义这个图解。选择零件Link1和cardian之间的本地铰链配合作为【模拟单元】,如图2-46所示。单击【确定】。
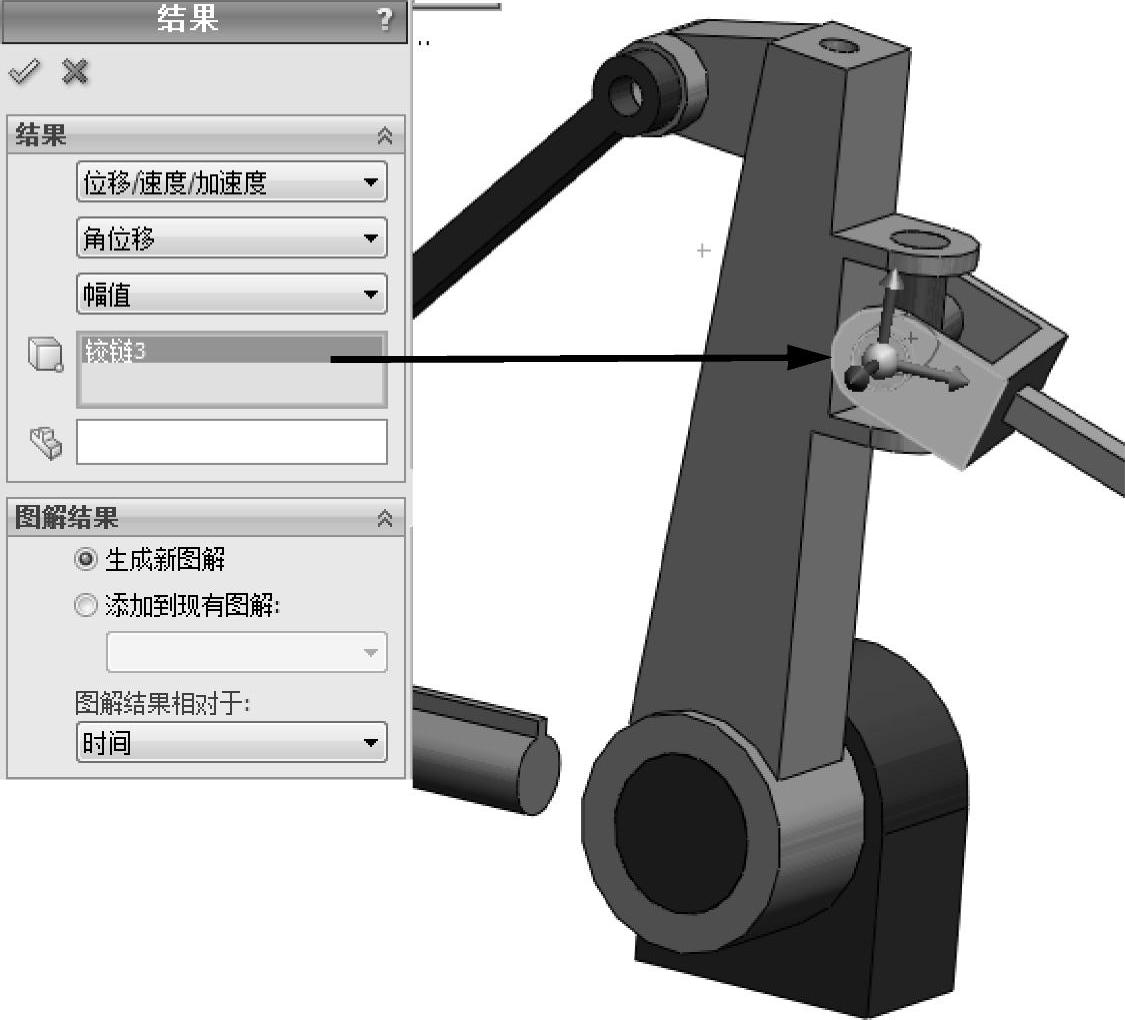
图2-46 定义角位移图解1
注意坐标轴位于铰链上的位置。这表明输出的坐标系是铰链配合的局部坐标系,只能得到大小数值,如图2-47所示。这个图解显示了零件Link2在竖直方向的转动量约为1.3°。
步骤35 马达的角位移
为了探索角位移图解中其他选项的作用,将修改现有的图解而不用新建图解。
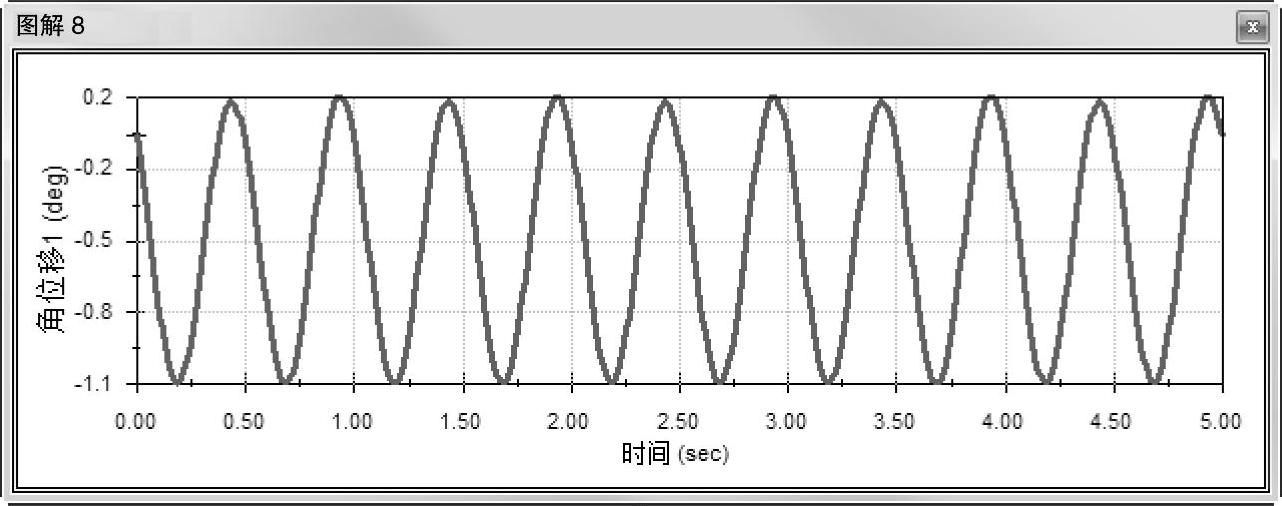
图2-47 查看角位移图解(一)
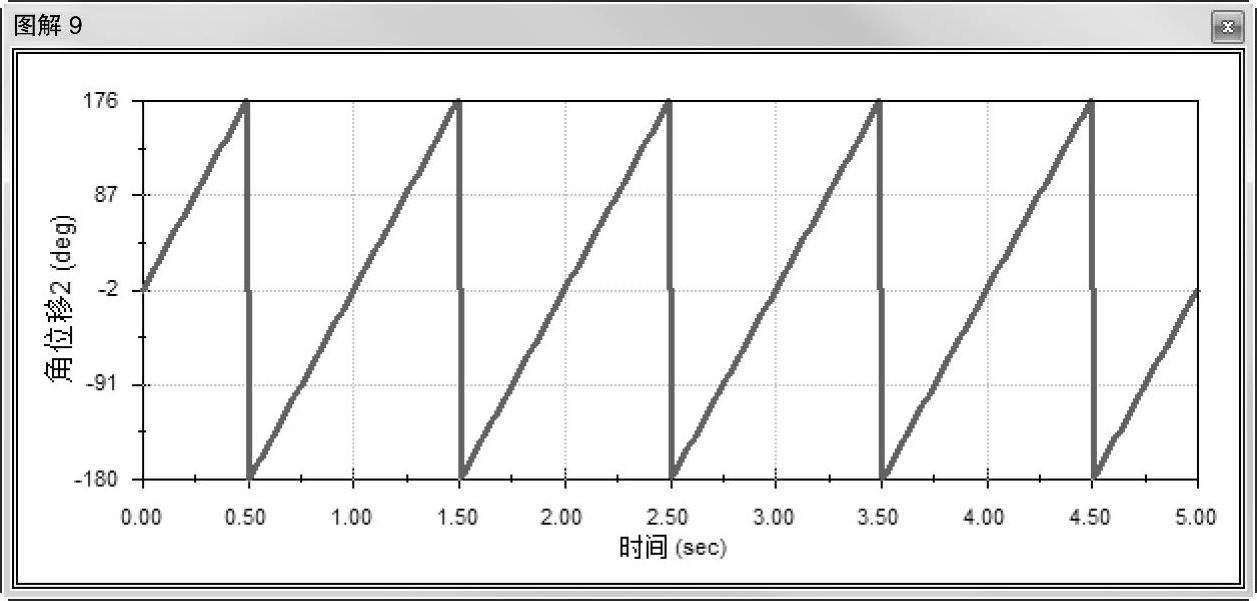
在“Results”文件夹下,右键单击最后一个图解,选择【编辑特征】。删除铰链配合,选择运动部件Motor-crank为【模拟单元】。单击【确定】。
图2-48显示了马达的简谐运动。角位移从0°变化到+180°,然后再回到-180°。图2-48中的斜率是常数。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-48 查看结果
步骤36 由三点确定的两条线产生的角位移
这一次将生成一个图解,显示三点确定的两条线产生的角位移。新建一个图解,选择【位移/速度/加速度】、【角位移】、【幅值】来定义这个图解。
在【模拟单元】中,首先选择如图2-49所示的两个点,然后选择边线。
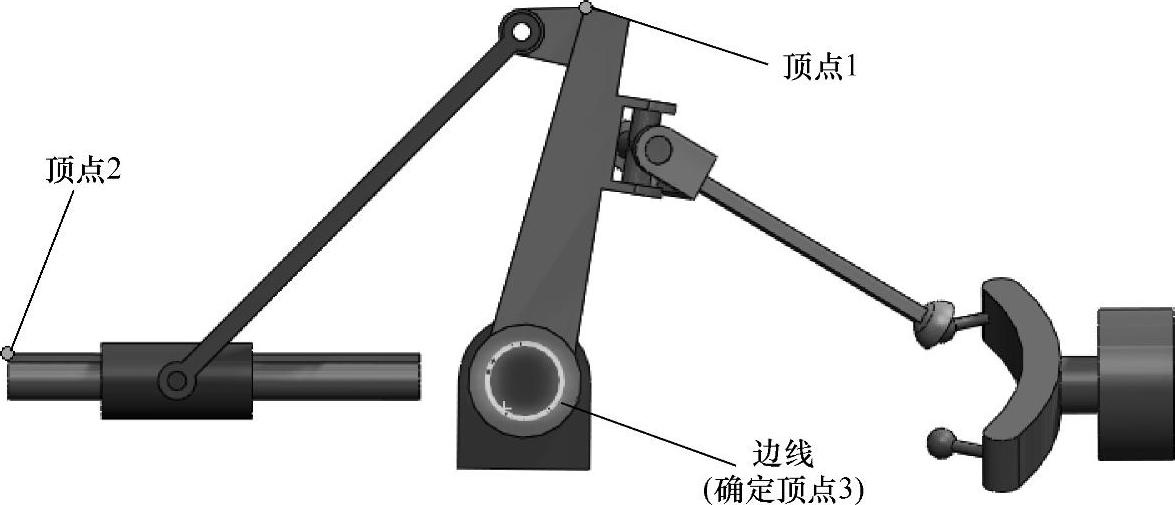
图2-49 三顶点位置
勾选【在图形窗口中显示向量】,如图2-50所示。这将显示三个所选点之间的连线。单击【确定】。
步骤37 查看图解
图2-51中显示的角度源于这两条连线,一条线由顶点1和顶点3定义,另一条线由顶点2和顶点3定义(因此顶点3确定了中心点)。注意在当前这个例子中,角运动的范围为37°,位于74°~111°之间。
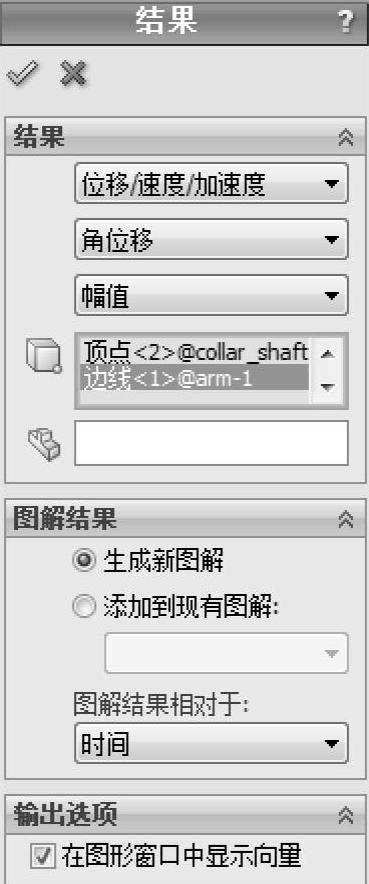
图2-50 定义角位移图解2
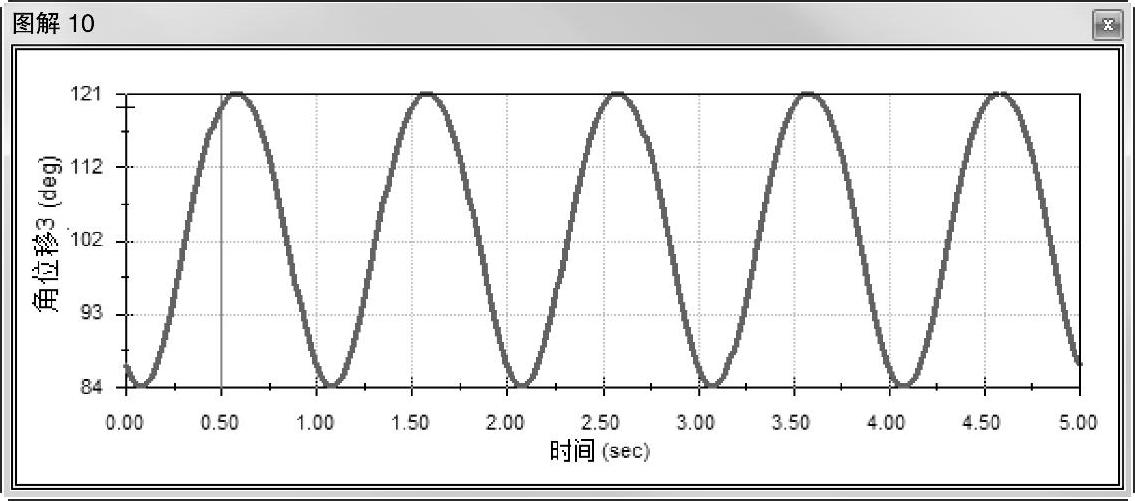
图2-51 查看角位移图解(二)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。