



通常情况下,输出的结果是基于装配体的全局坐标系。然而,对于某些仿真成分(例如配合与马达),其默认的输出是基于所选零部件的局部系统。
如果想要得到非默认坐标系下结果的图解,则需要在【定义XYZ方向的零部件】选项中选择所需的零部件。则所有数值都将转换到所选零件的坐标系中,如图2-36所示。
提示
所需的坐标系将在图形指定区域显示,如图2-37所示。
图2-36 选择零部件
图2-37 局部坐标系
在下一环节,我们将以四个图解来显示绝对及相对的结果,同时解释其在全局坐标系和局部坐标系二者中的区别。
步骤30 全局系统中零部件的绝对结果
生成一个图解,显示arm线性位移的X分量。选择【位移/速度/加速度】、【线性位移】、【X分量】定义这个图解。在【模拟单元】中,选择零部件arm的任意一个表面,如图2-38所示。单击【确定】。
提示
如果我们选择了一个表面,则图解将显示零件原点的线性位移,其原点显示为一个蓝色小球,在全局装配体系统中相对于装配体的原点。

图2-38 定义线性位移图解1
由于输入为简谐运动,所以输出也为一个振荡运动,如图2-39所示。
步骤31 转换到局部系统中零部件的绝对结果
生成一个图解,显示arm在局部坐标系下线性位移的X分量。编辑前面的图解,选择arm为【定义XYZ方向的零部件】,如图2-40所示。单击【确定】。

图2-39 查看线性位移图解(一)
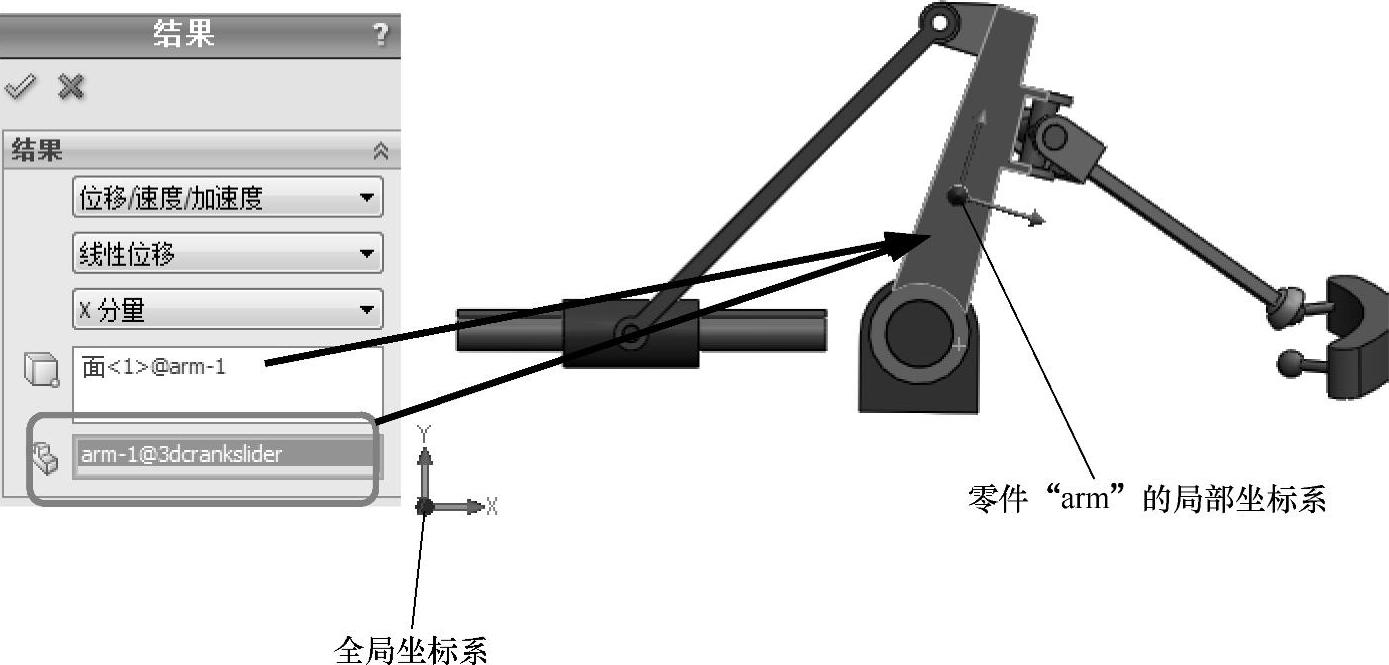
图2-40 选择零部件
提示(https://www.xing528.com)
零件arm上的坐标轴现在指明了输出的局部坐标系与全局坐标系已经不一致了。此外,应注意到当播放运动时,局部坐标系相对于全局坐标系发生了平移和旋转,如图2-41所示。
图2-41显示了零件原点相对于装配体原点的线性位移在零件坐标系下的转换。或者可以按照步骤30中的数值查看,即在零件arm的坐标系下进行转换。
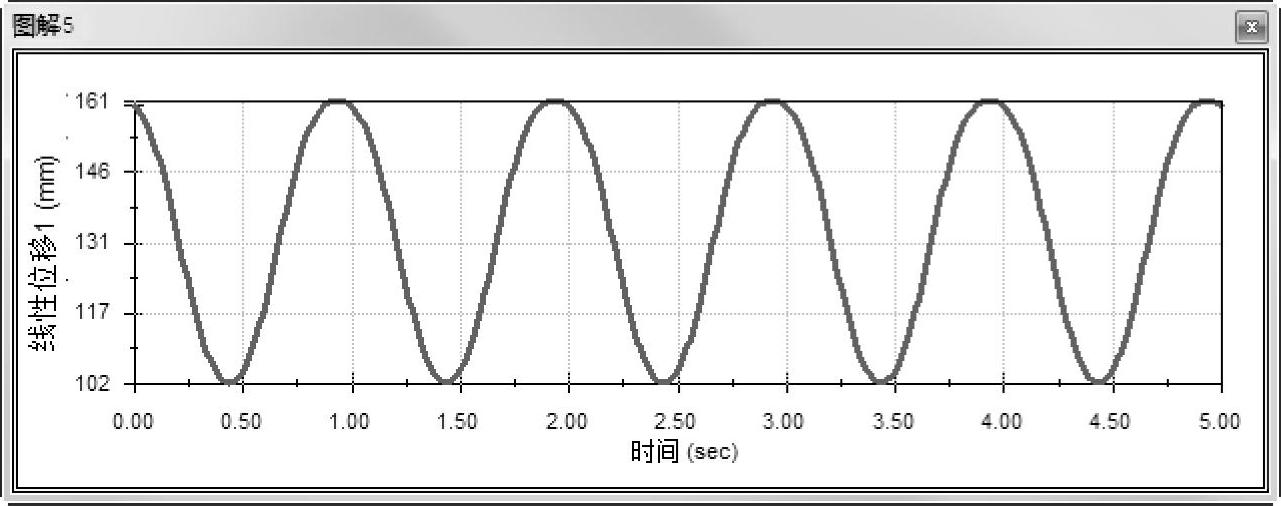
图2-41 查看线性位移图解(二)
步骤32 全局系统中零部件的相对结果
生成一个图解,显示arm相对于零件collar线性位移的X分量。编辑上一个图解。清除【定义XYZ方向的零部件】选项中的内容。选择零件collar为【模拟单元】选项中的第二个成分,如图2-42所示。
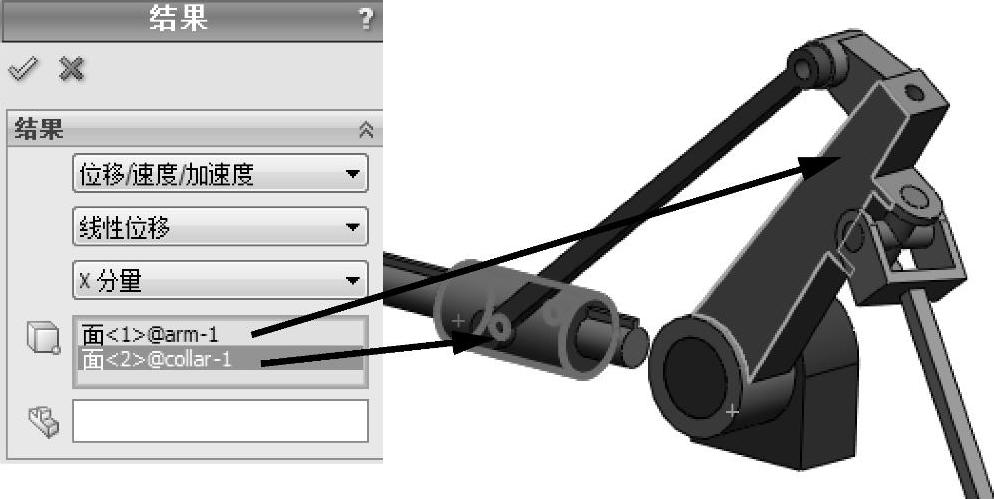
图2-42 定义线性位移图解2
这里可以看到,位移产生了稍许不同的振荡特征,因为arm的位移是基于全局坐标系的(步骤30),如图2-43所示。零部件的相对结果是在局部系统中转换得来的。
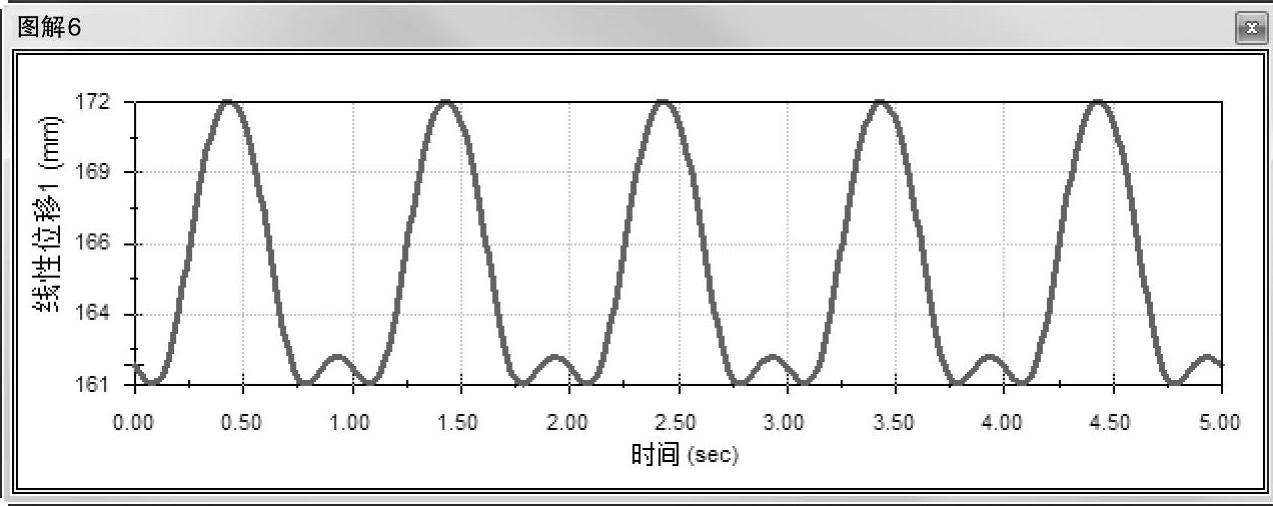
图2-43 查看线性位移图解(三)
提示
图2-43显示了arm原点相对于全局坐标系下collar零件原点的线性位移。
步骤33 局部系统中零部件的相对结果
生成一个图解,显示arm相对于零件collar线性位移的X分量。在Link1的局部坐标系下转换结果。编辑上一个图解的定义,选择Link1为【定义XYZ方向的零部件】选项中的内容,如图2-44所示。
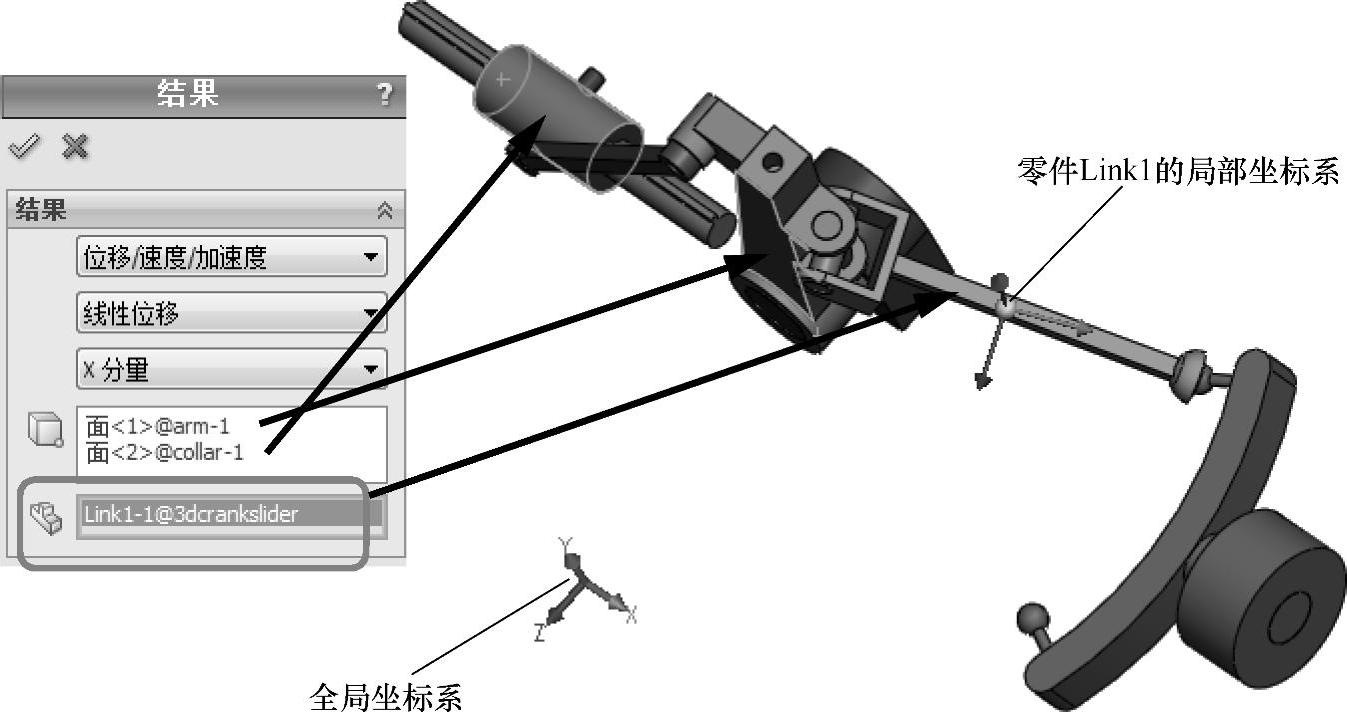
图2-44 定义线性位移图解3
提示
零件Link1上的坐标轴表明输出的局部坐标系与全局坐标系已经不一致了。
图2-45显示了步骤32中绘制的数值,是在零件collar的坐标系下进行转换得来的。
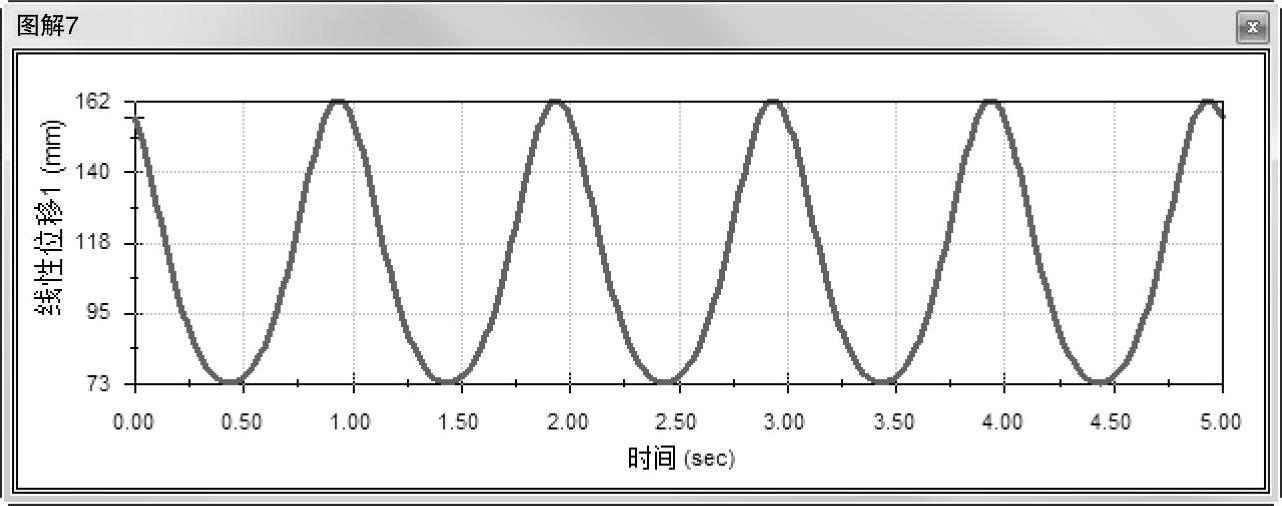
图2-45 查看线性位移图解(四)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。