



配合用来约束通过物理连接的一对刚性物体的相对运动。
提示
刚体作为单一个体移动并起作用。SolidWorks中位于根目录层的零部件被认为是刚体,这也意味着SolidWorks和SolidWorksMotion将子装配体视为单个刚体。
配合可以划分为两大类:
● 用来约束通过物理连接的一对刚性物体的相对运动的配合。例如:铰链、同轴、重合、固定、螺旋、凸轮等。
● 用于加强标准几何约束的配合。例如:距离、角度、平行等。
下面列出了一些最常用的配合类型。如果想全面了解所有配合,请参考SolidWorks帮助文件。
(1)同轴心配合 同轴心配合允许一个刚体相对于另一个刚体同时做相对旋转运动和相对平移。同轴心配合的原点可以位于轴线上的任何位置,而刚体之间可以相对于该轴线进行转动和平移。例如:在气缸内活塞的滑动及转动,如图2-3所示。
(2)铰链配合 铰链配合在本质上就是两个零部件之间移动受限的同轴心配合。
在SolidWorks Motion中,使用铰链配合而不是采用同轴心加上重合组合,因为机构的接头为一个铰链。用户可以在配合PropertyManager的【机械配合】选项卡中找到铰链配合,如图2-4所示。
(3)点对点重合配合 这类配合允许一个刚体绕着两个刚体的共同点相对于另一个刚体进行自由旋转。配合的合原点位置决定了这个共同点,使得刚体可以按此为中心点彼此之间进行自由旋转,例如球形关节,如图2-5所示。
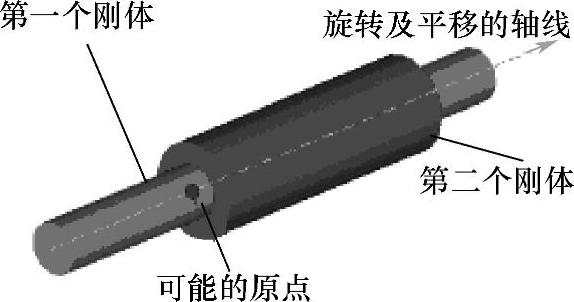
图2-3 同轴心配合
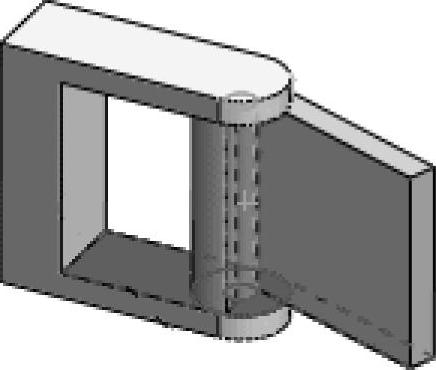
图2-4 铰链配合
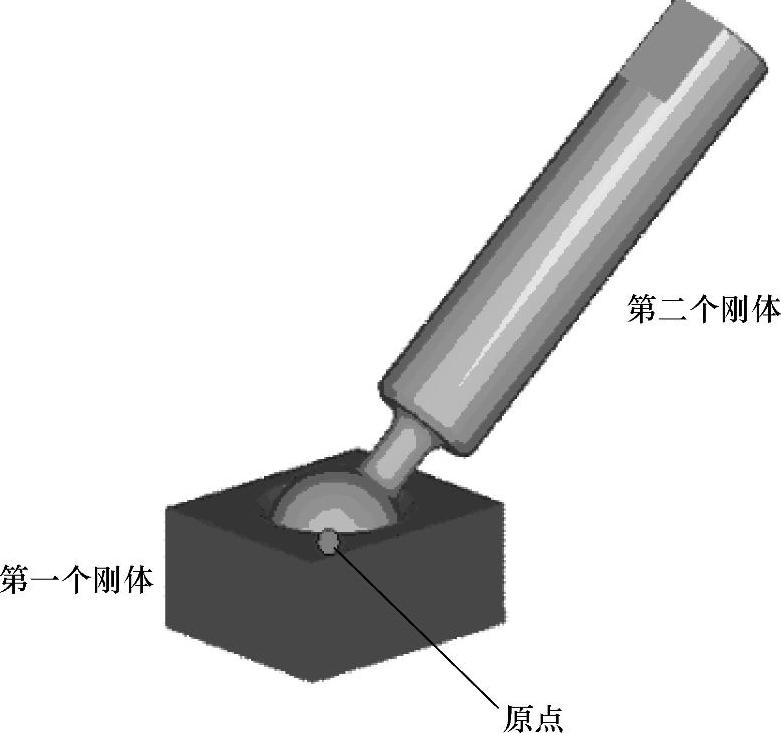
图2-5 点对点重合配合
(4)锁定配合 锁定配合将两个刚体锁定在一起,使得彼此之间无法移动。对于一个锁定配合而言,原点位置及方向不会影响到仿真结果。将两个零件连到一起的焊接便属于锁定配合,如图2-6所示。
(5)面对面的重合配合 该配合允许一个刚体相对于第二个刚体沿特定路径发生平移。刚体彼此之间只能平移,不能旋转。
平移接头相对于刚体的原点位置不会影响两个实体的运动,但是会影响到反作用力或支承负载,如图2-7所示。
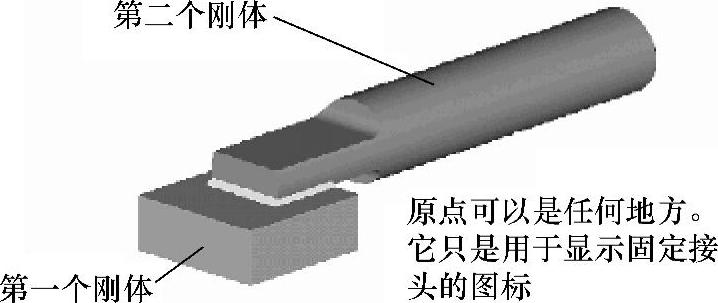
图2-6 锁定配合(https://www.xing528.com)
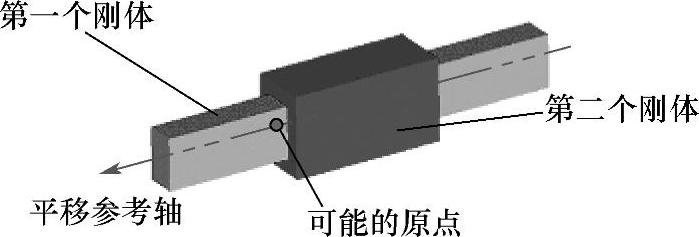
图2-7 面对面的重合配合
(6)万向节配合 万向节配合能够将旋转从一个刚体转移至另一个刚体。这个配合用于在转角处传递旋转运动,或在两个相连的并允许在连接处成一定角度的杆件(例如汽车的传动轴)之间传递旋转运动时非常有效。
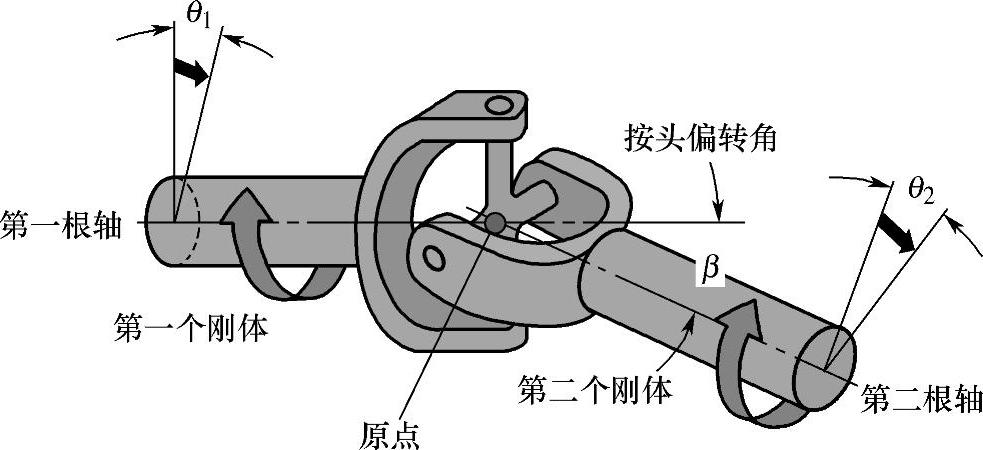
图2-8 万向节配合
万向节配合的原点位置表现为两个刚体的连接点。两根轴线确定了由万向节连在一起的两个刚体的中心线。请注意SolidWorks Motion使用的转轴平行于用户指定的转轴,但是会穿过万向节配合的原点,如图2-8所示。
(7)螺旋配合 螺旋配合是指一个刚体相对另一个刚体在平移的同时进行旋转运动。当定义一个螺旋配合时,用户可以定义距离(螺距)。距离是指第一个刚体绕第二个刚体一整圈所平移的相对位移。第一个刚体相对于第二个刚体的位移是第一个刚体的旋转关于转轴的函数。每转一整圈,相对于第二个刚体沿轴线平移的第一个刚体的位移等于距离的值,如图2-9所示。
(8)点在轴线上的重合配合 此类配合允许一个零件相对于另一个零件拥有一个平移和三个旋转运动。两个零件之间的平移运动受制于轴线的方向。点用于定义轴线上初始的位置,如图2-10所示。
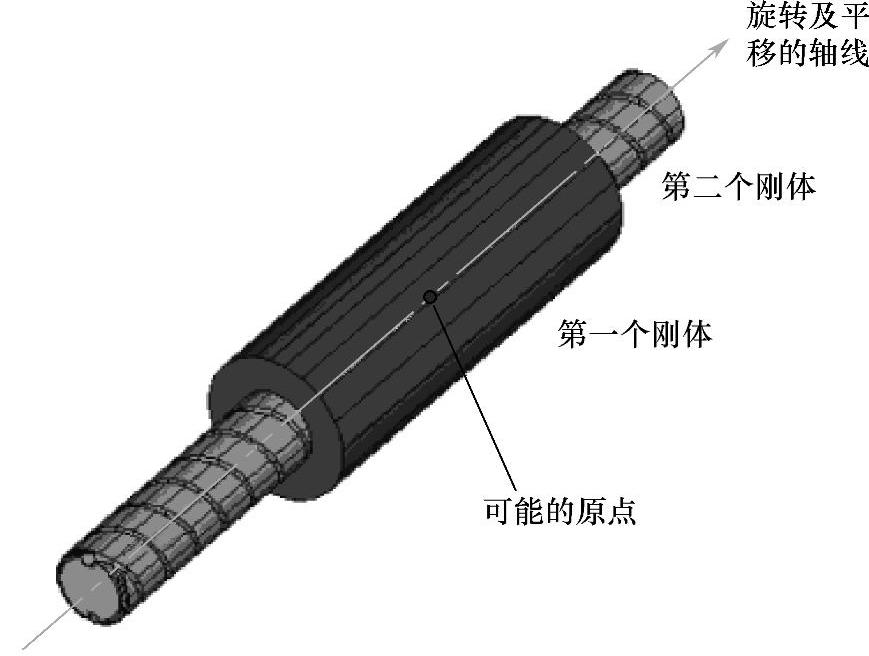
图2-9 螺旋配合
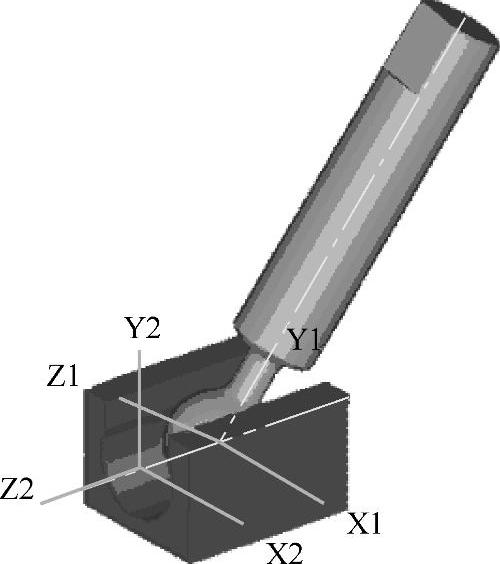
图2-10 点在轴线上的重合配合
(9)平行配合 平行配合只允许一个零件相对于另一个零件进行平移,绝不允许旋转。
在下图中,蓝色的X-part可以相对于地面沿X方向运动。红色的Y-part可以相对于X-part沿Y方向运动。Z-part可以相对于Y-part沿Z方向运动。最终,Z-part上的红、黄、蓝方块相对于地面会产生一个曲线运动,但也总保持平行,如图2-11所示。
(10)垂直配合 垂直配合允许一个零件相对于另一个零件进行平移和旋转。它在零部件上限制为一个旋转约束,因此零部件的轴线保持垂直。这个配合关系允许沿着任何一个Z轴进行旋转,但不允许在垂直于这两个Z轴的方向发生相对旋转,如图2-12所示。
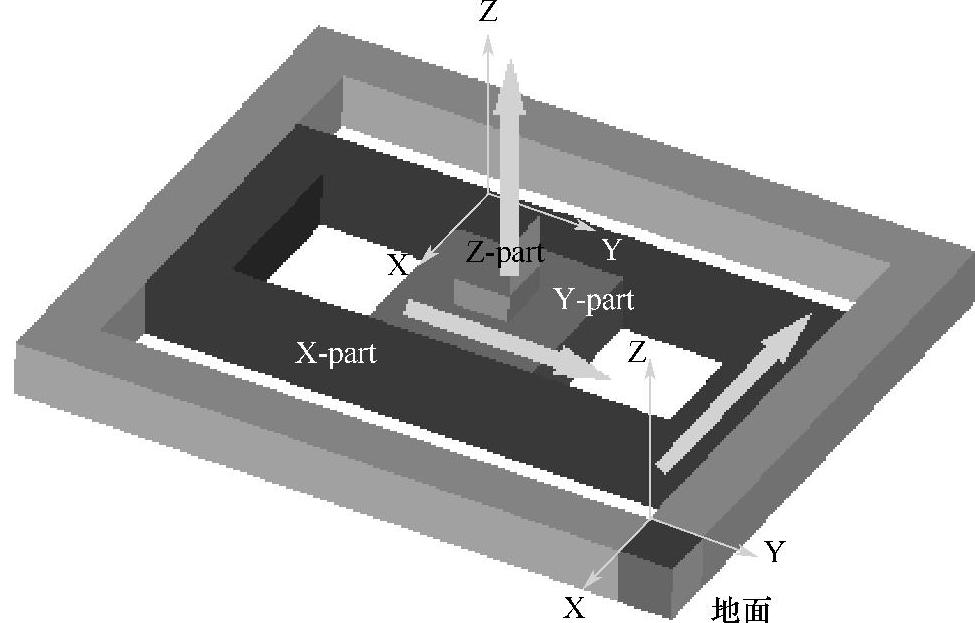
图2-11 平行配合
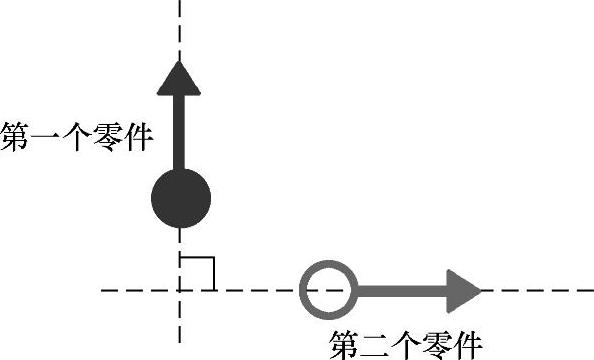
图2-12 垂直配合
提示
建议定义的配合最好能体现真实的机械连接,例如机械铰链就应当使用铰链配合来模拟,而不是使用重合配合和同轴配合的组合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。