



图1-24所示为3D四连杆机构,机构中只有四个零件。零件“support”固定在地面上,零件“LeverArm”的转动会导致零件“SliderBlock”滑动。
本练习将应用以下技术:
● 基本运动分析。
● 结果。
项目描述 零件“LeverArm”以恒定的360°/s的角速度简单地转动。确定驱动这个机构所需的力矩大小,并从运动仿真的结果中图解显示出来。
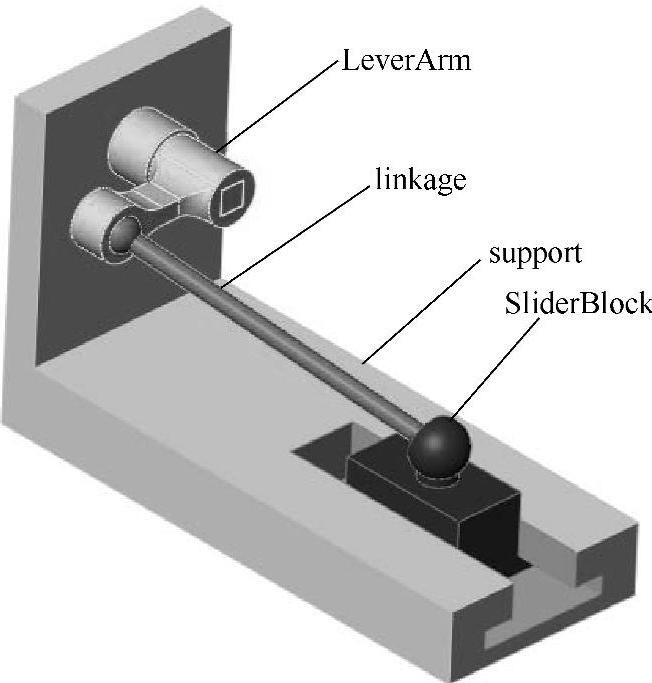
图1-24 3D四连杆机构
操作步骤
步骤1 打开装配体文件
从文件夹“SolidWorks Motion Simulotion\Lesson01\Exercises\3D Fourbar Linkage”下打开文件“3D fourbar linkage”。
步骤2 验证固定和移动的零部件
确定零件“support”是固定的,而其他零部件是可以移动的,如图1-25所示。
步骤3 运动算例
在MotionManager工具栏中选择【Motion分析】,默认的“Motion Study1”将用于本次分析。
步骤4 添加引力
在Z轴负方向添加引力。
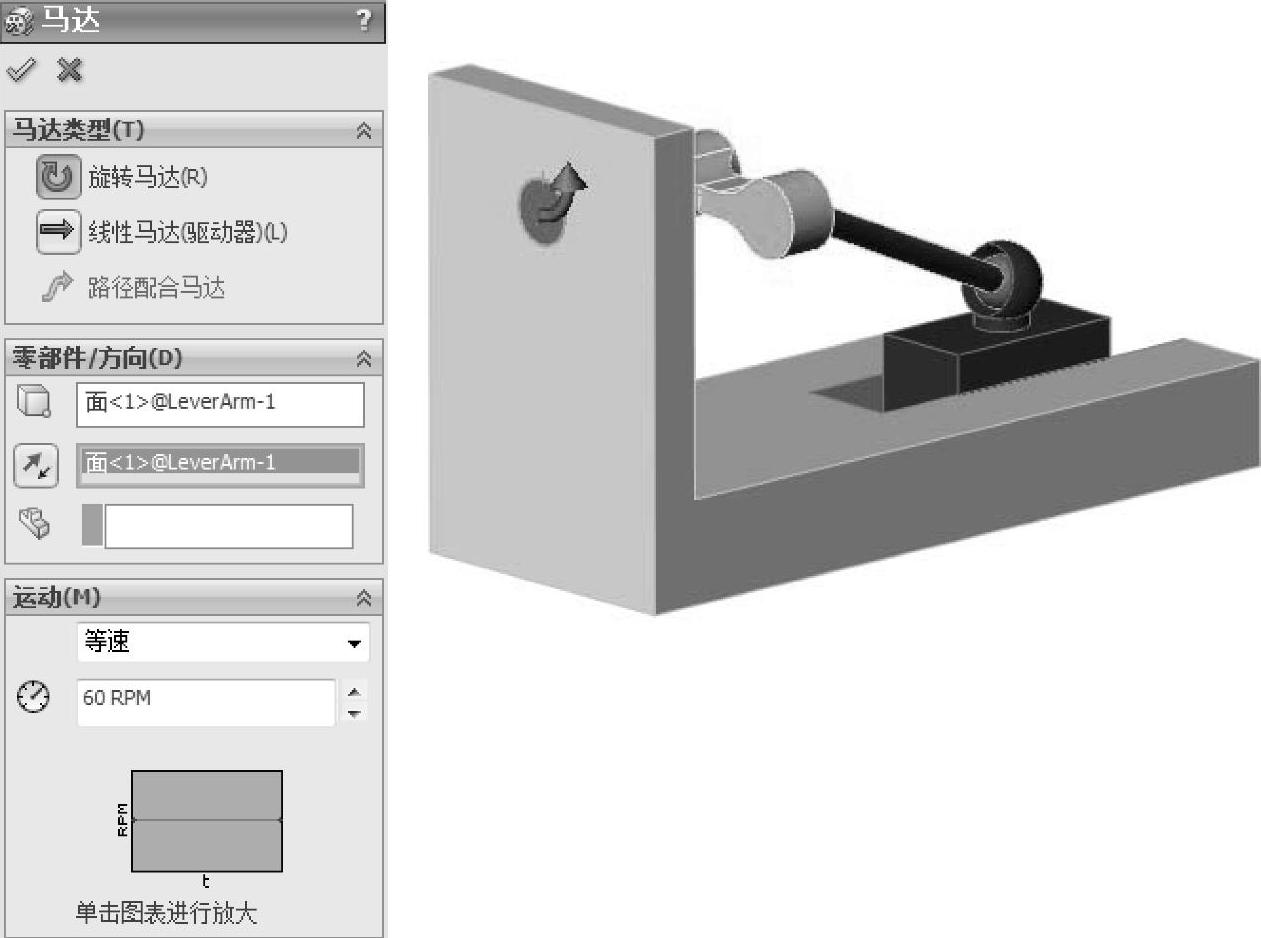
步骤5 定义零件Lever Arm的运动
定义一个角速度为360°/s的旋转马达,如图1-26所示。
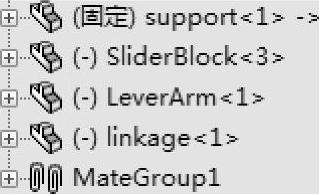
图1-25 零部件属性
 (https://www.xing528.com)
(https://www.xing528.com)
图1-26 定义马达
技巧
用户可以在PropertyManager中直接输入“360 deg/sec”,系统会自动将其转化为每分钟转动量(RPM)。
步骤6 运动算例属性
设置【每秒帧数】为“100”,并将时间帧拖至4s。
步骤7 计算仿真
步骤8 确定驱动该机构所需的力矩和能量
定义一个图解,显示力矩和所需能量与时间之间的函数关系。在同一图解中定义这两个数量关系,如图1-27所示。
步骤9 显示零件SliderBlock的线性速度
建立一个图解,显示零件“SliderBlock”的线性速度与时间之间的函数关系,如图1-28所示。
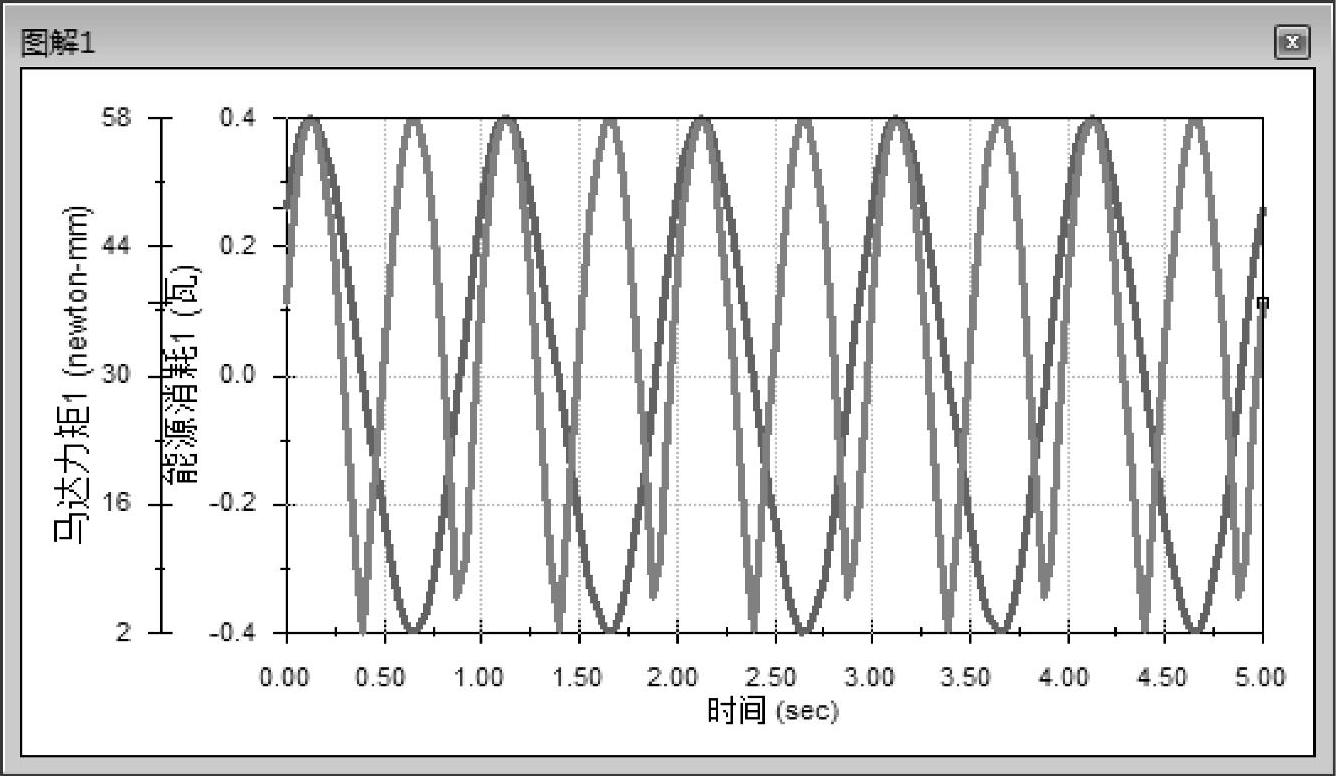
图1-27 图解结果
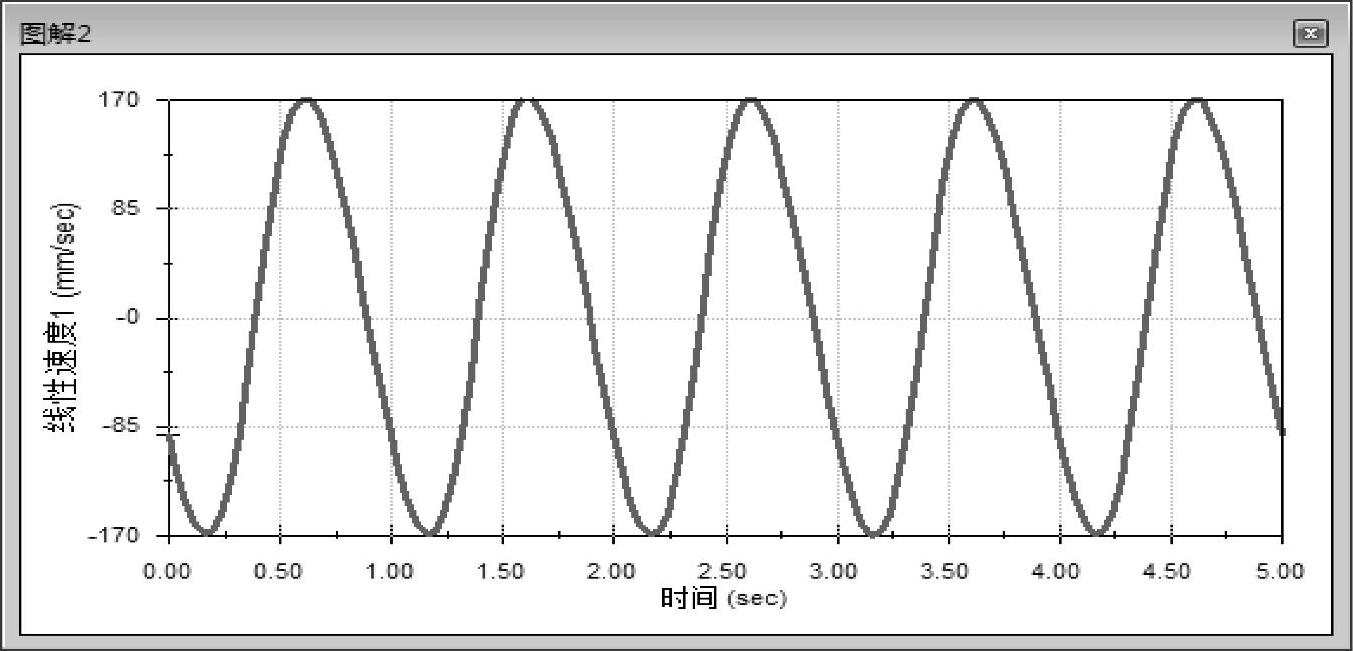
图1-28 线性速度结果
步骤10 修改图解
修改图解的坐标,显示旋转马达的角位移。更改之后,图解将显示零件“SliderBlock”的速度相对于零件“LeverArm”角位移的变化,如图1-29所示。
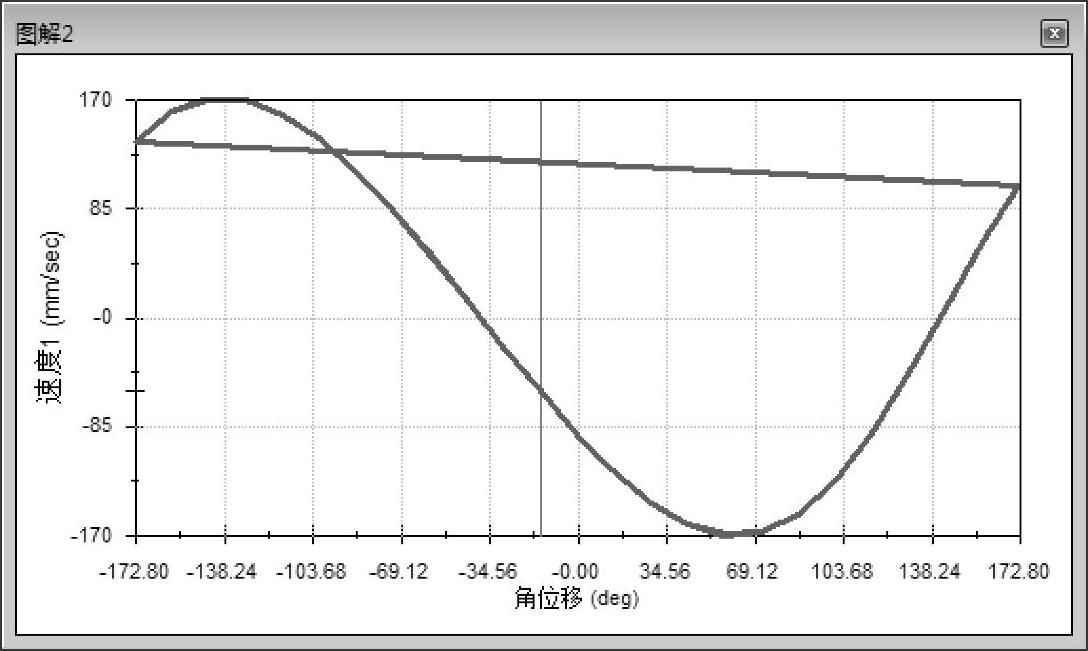
图1-29 速度-角位移关系图解
步骤11 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。