



力的方向源于用户在【方向】对话框中指定的参考零件,如图1-10所示。下面给出了三个情况,向用户解释了力的方向是如何随着所选参考零件的变化而发生变化的。
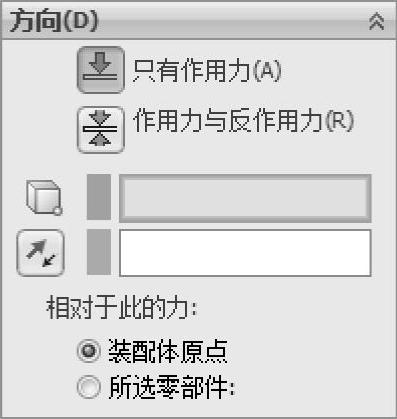
图1-10 力的方向
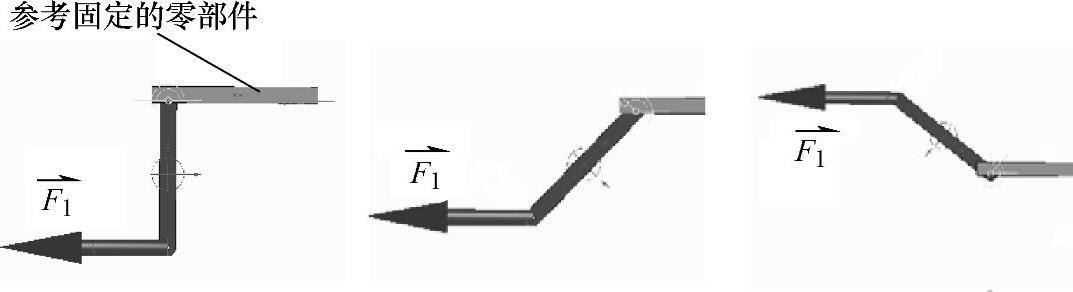
图1-11 基于固定零部件的力的方向
1.情况1 基于固定零部件的力的方向,如果固定零部件是装配体的基础,则力的初始方向将在整个仿真过程中保持不变,如图1-11所示。
2.情况2 基于所选移动零部件(用户想添加作用力的零部件)的力的方向,如果加载力的零件用作参考基准,则在整个仿真的时间内,力的方向该零件的相对方向保持不变(也就是说,与用于定义方向的实体的几何体保持相对关系),如图1-12所示。
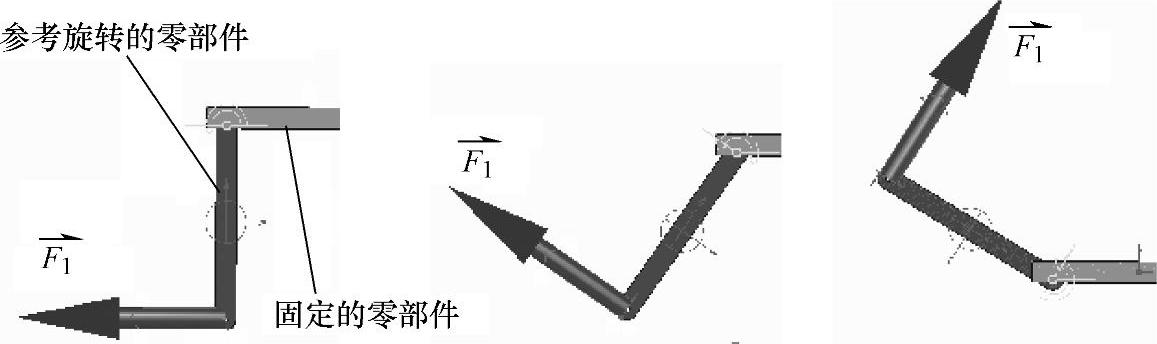
图1-12 基于所选移动零部件的力的方向1
3.情况3 基于所选移动零部件(用户不想添加作用力的零部件)的力的方向,如果另一个移动的零件用作参考基准,则力的方向将根据移动实体这个参考对象的相对方向而变化。如果用户在一端固定的实体上施加力的作用并使用一个旋转的零件作为参考基准时,将会发现力会随着参考实体一起转动,如图1-13所示。
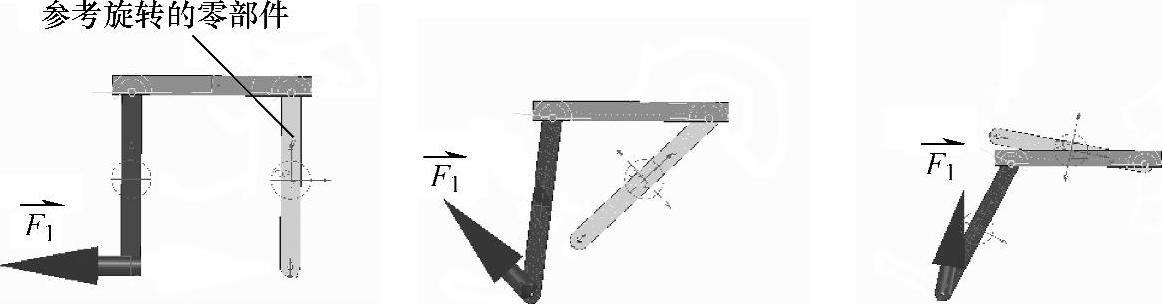
图1-13 基于所选移动零部件的力的方向2
提示
确保引力符号的方向是沿着Y的负方向。
步骤8 添加力(https://www.xing528.com)
在MotionManager工具栏中单击【力】 ;在【类型】选择【力】;在【方向】选择【只有作用力】;在【作用零件和作用应用点】选择零部件Support-1的圆形边线,如图1-14所示;在【力的方向】中,选择零部件Base-1的竖直边线。
;在【类型】选择【力】;在【方向】选择【只有作用力】;在【作用零件和作用应用点】选择零部件Support-1的圆形边线,如图1-14所示;在【力的方向】中,选择零部件Base-1的竖直边线。
提示
默认的力的方向由【作用零件和作用应用点】这个域中选择的圆形边线来定义,即垂直于边线的基准面。由于这个例子中默认的方向是正确的,因此没有必要在【力的方向】这个域中再选择边线,我们这样做完全是为了教学的目的。
在【力函数】,选择【常量】,输入力的数值“8900牛顿”,如图1-14所示。
提示
确保力的方向指示朝下。
单击【确定】,关闭【力/扭矩】PropertyManager面板。
步骤9 运行仿真
单击【计算】 ,仿真将计算5s的内容。
,仿真将计算5s的内容。
步骤10 运行包含8s的仿真
将结束时间帧拖至时间轴的8s处,然后重新进行计算。
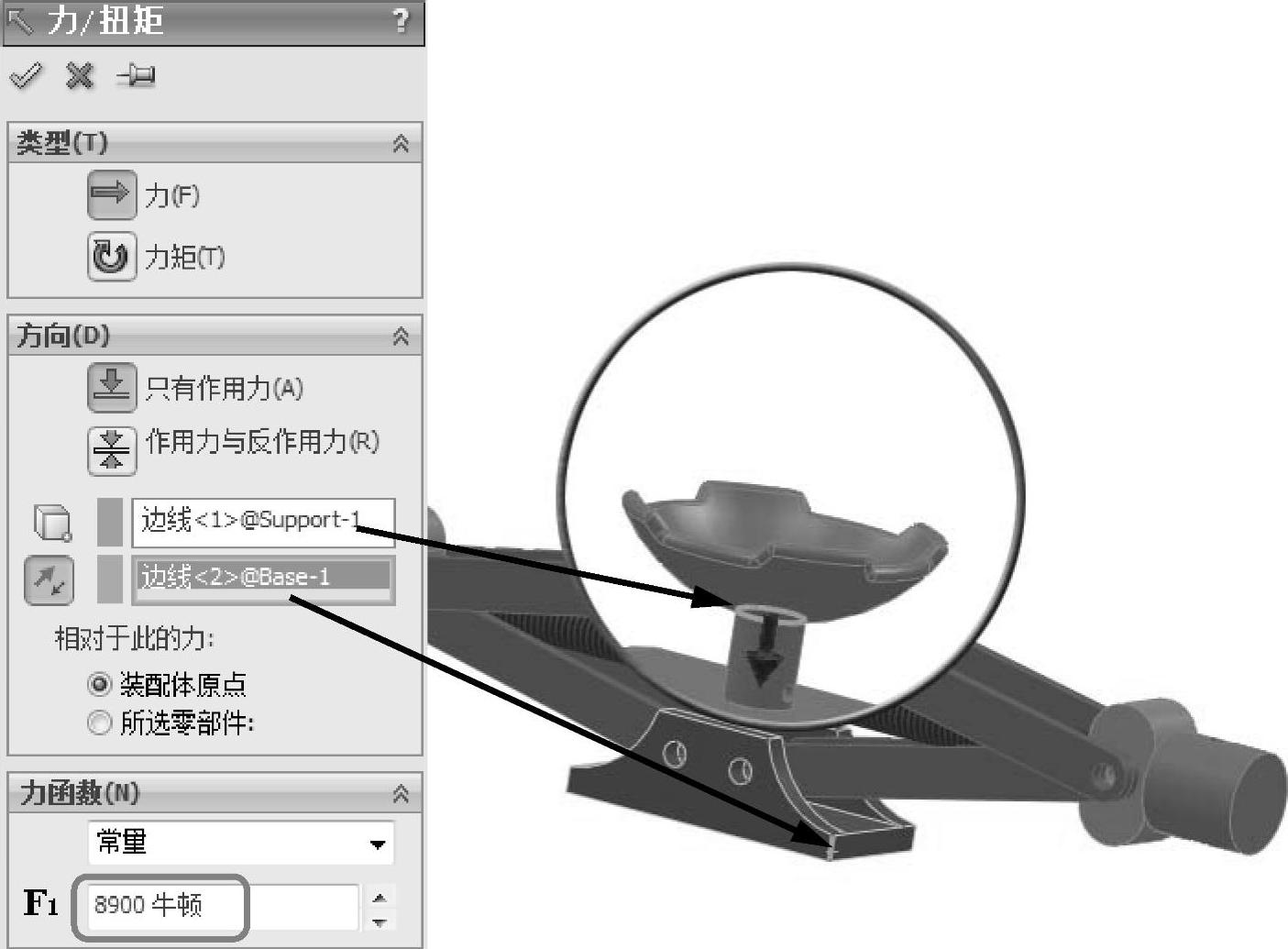
图1-14 添加力
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。