



【摘要】:质量与惯性 惯性定律是经典物理学基本定律之一,它描述了力与运动的关系。约束自由度 减少自由度将限制构件的独立运动,这种限制称为约束。如图0-2所示,配合连接两个构件,并限制两个构件之间的相对运动。对质量不发生改变的实体,方程式右侧可以简化成更为大家熟知的质量乘以加速度,ΣF=ma。运算结果不断迭代直到满足预定的精确度,如图0-3所示。
(1)质量与惯性 惯性定律是经典物理学基本定律之一,它描述了力与运动的关系。现在,惯性的概念通常用牛顿第一运动定律描述:
一切物体总保持匀速运动状态或静止状态,直到有外力迫使它们改变这种状态。
在动力学和运动学系统的仿真过程中,质量和惯性有非常重要的作用,几乎所有的仿真过程都需要真实的质量和惯性数据。
(2)自由度 一个不被约束的刚性物体在空间坐标系中具有6个自由度:3个为平移自由度,3个为转动自由度。如图0-1所示,它能够沿X、Y和Z轴移动,并绕X、Y和Z轴转动。
(3)约束自由度 减少自由度将限制构件的独立运动,这种限制称为约束。如图0-2所示,配合连接两个构件,并限制两个构件之间的相对运动。

图0-1 自由度
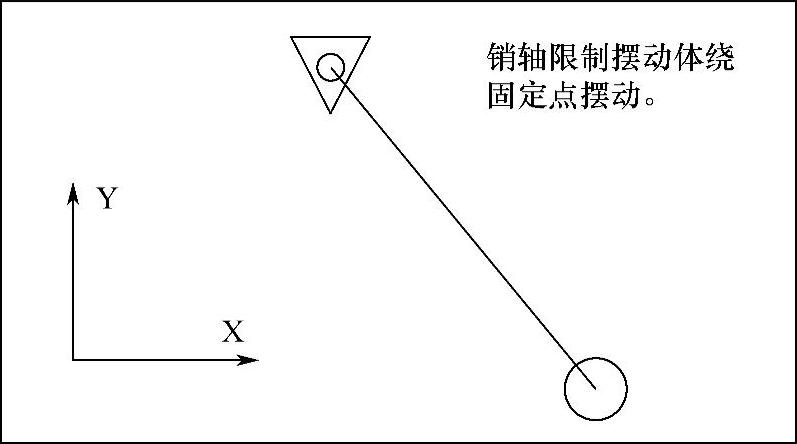
图0-2 约束自由度
(4)运动分析 欧拉方程说明了一个刚性物体的三维运动规律,它由两个方程组成:第一个方程是牛顿第二运动定律,它描述了施加在主体上外力的总和等于线动量p的变化率,即 。(https://www.xing528.com)
。(https://www.xing528.com)
对质量不发生改变的实体,方程式右侧可以简化成更为大家熟知的质量乘以加速度,ΣF=ma。第二个方程说明主体上外力围绕质心产生力矩之和等于主体角动量H的变化率, 。
。
(5)运动分析步骤 在每个时间步长中,程序使用改进的Newton-Raphson迭代法进行求解。通过非常小的时间步长,根据零件的初始状态或前一时间步长的结果,软件可以预测下一时间步长内零件的状态,但求解时必须已知以下量:
● 构件速度。
● 连接构件的配合。
● 力与加速度。
运算结果不断迭代直到满足预定的精确度,如图0-3所示。
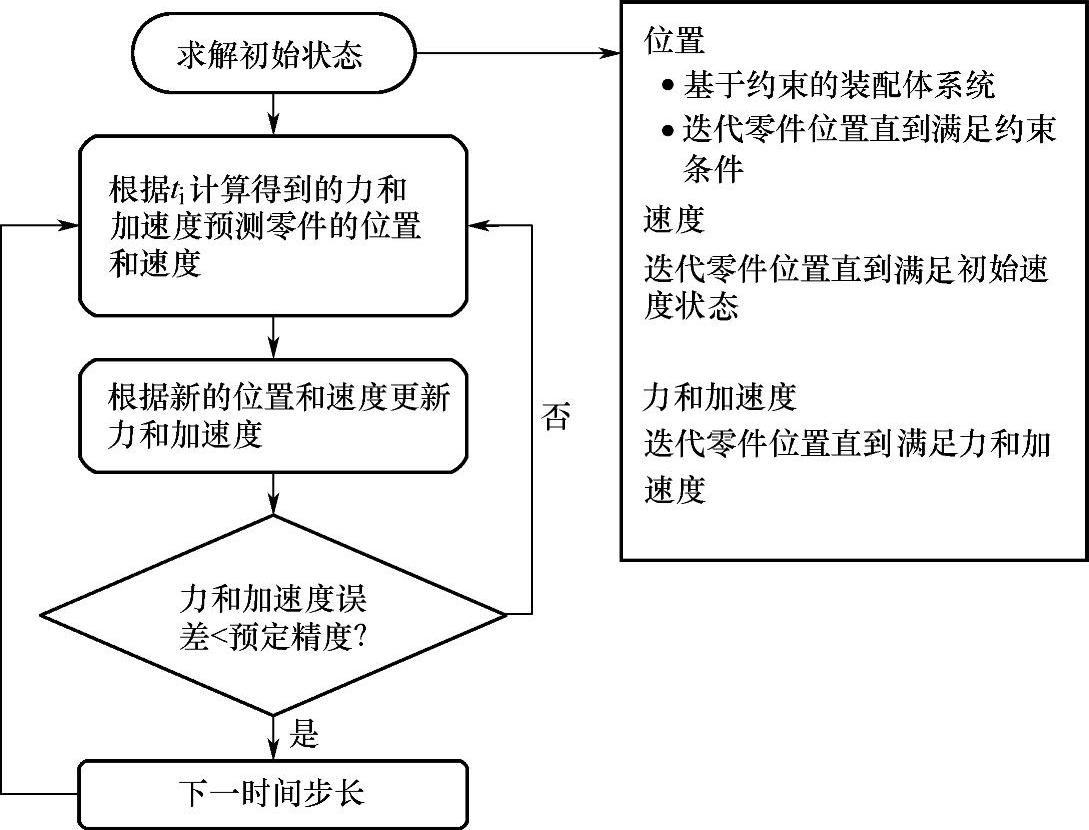
图0-3 分析步骤
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。