



伺服电动机通常使用编码器来检测转速和位置。编码器种类很多,主要可分为增量型编码器和绝对值编码器。
1.增量型编码器
增量型编码器的特点是每旋转一定的角度或移动一定的距离会产生一个脉冲,即输出脉冲随位移增加而不断增多。
(1)外形
增量型编码器的外形如图6-8所示。

图6-8 增量型编码器的外形
(2)结构与工作原理
增量型光电编码器是一种较常用的增量型编码器,它主要由玻璃码盘、发光管、光电接收管和整形电路组成,玻璃码盘的结构如图6-9所示,它从外往内分作三环,依次为A环、B环和Z环,各环中的黑色部分不透明,白色部分透明可通过光线,玻璃码盘中间安装转轴,与伺服电动机同步旋转。
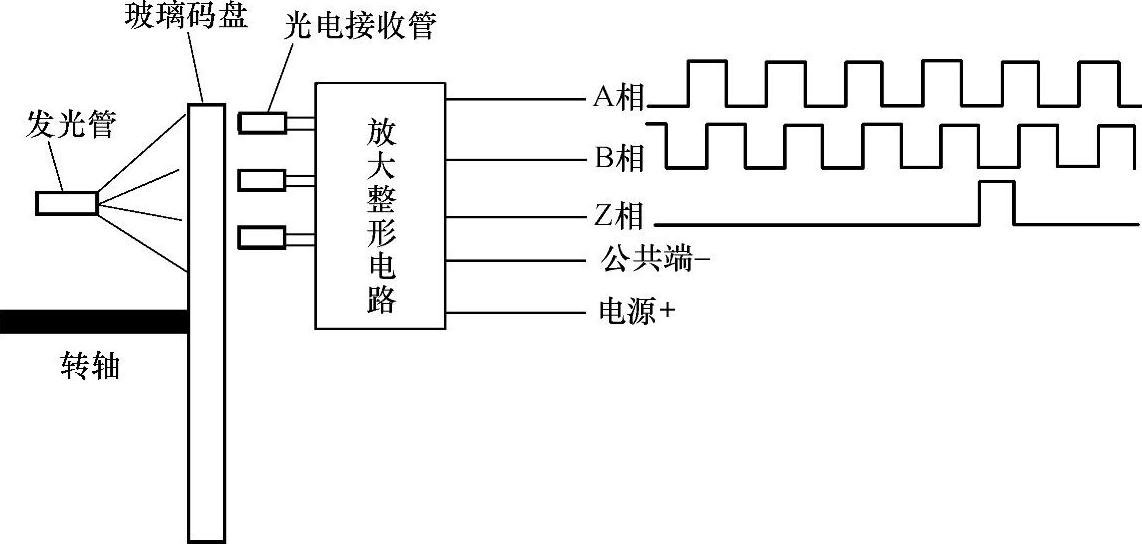
增量型光电编码器的结构与工作原理如图6-10所示。编码器的发光管发出光线照射玻璃码盘,光线分别透过A、B环的透明孔照射A、B相光电接收管,从而得到A、B相脉冲,脉冲经放大整形后输出。由于A、B环透明孔交错排列,故得到的A、B相脉冲相位相差90°,Z环只有一个透明孔,码盘旋转一周时只产生一个脉冲,该脉冲称为Z脉冲(零位脉冲),用来确定码盘的起始位置。
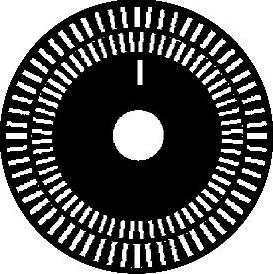
图6-9 玻璃码盘的结构
通过增量型光电编码器可以检测伺服电动机的转向、转速和位置。由于A、B环上的透明孔是交错排列,如果码盘正转时A环的某孔超前B环的对应孔,编码器得到的A相脉冲相位较B相脉冲超前,码盘反转时B环孔就较A环孔超前,B相脉冲就超前A相脉冲,因此了解A、B脉冲相位情况就能判断出码盘的转向(即伺服电动机的转向)。如果码盘A环上有100个透明孔,码盘旋转一周,编码器就会输出100个A相脉冲;如果码盘每秒钟转10转,编码器每秒钟会输出1000个脉冲,即输出脉冲的频率为1kHz;如果码盘每秒钟转50转,编码器每秒钟就会输出5000个脉冲,输出脉冲的频率为5kHz,因此了解编码器输出脉冲的频率就能知道电动机的转速。如果码盘旋转一周会产生100个脉冲,从第一个Z相脉冲产生开始计算,若编码器输出25个脉冲,表明码盘(电动机)已旋转到1/4周的位置;若编码器输出1000个脉冲,表明码盘(电动机)已旋转10周,电动机驱动执行部件移动了相应长度的距离。
编码器旋转一周产生的脉冲个数称为分辨率,它与码盘A、B环上的透光孔数目有关,透光孔数目越多,旋转一周产生的脉冲数越多,编码器分辨率越高。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-10 增量型光电编码器的结构与工作原理
2.绝对值编码器
增量型编码器通过输出脉冲的频率反映电动机的转速,通过A、B相脉冲的相位关系反映电动机的转向,故检测电动机转速和转向非常方便。
增量型编码器在检测电动机旋转位置时,通过第一个Z相脉冲之后出现的A相(或B相)脉冲的个数来反映电动机的旋转位移。由此可见,增量型编码器检测电动机的旋转位移是采用相对方式,当电动机驱动执行机构移到一定位置时,增量型编码器会输出N个相对脉冲来反映该位置。如果系统突然断电,若相对脉冲个数未存储,再次通电后系统将无法知道执行机构的当前位置,需要让电动机回到零位重新开始工作并检测位置,即使系统断电时相对脉冲个数被存储,如果人为移动执行机构,通电后,系统会以为执行机构仍在断电前的位置,继续工作时就会出现错误。
绝对值编码器可以解决增量型编码器测位时存在的上述问题,它可分为单圈绝对值编码器和多圈绝对值编码器。
(1)单圈绝对值编码器
图6-11a为4位二进制单圈绝对值编码器的码盘,该玻璃码盘分为B3、B2、B1、B0四个环,每个环分成16等份,环中白色部分透光,黑色部分不透光。码盘的一侧有4个发光管照射,另一侧有B3、B2、B1、B0共4个光电接收管,当码盘处于图示位置时,B3、B2、B1、B0接收管不受光,输出均为0,即B3B2B1B0=0000。如果码盘顺时针旋转一周,B3、B2、B1、B0接收管输出的脉冲如图6-11b所示,B3B2B1B0的值会从0000变化到1111。
4位二进制单圈绝对值编码器将一个圆周分成16个位置点,每个位置点都有唯一的编码,通过编码器输出的代码就能确定电动机的当前位置,通过输出代码的变化方向可以确定电动机的转向,如由0000往0001变化为正转,1100往0111变化为反转,通过检测某光电接收管(如B0接收管)产生的脉冲频率就能确定电动机的转速。单圈绝对值编码器定位不受断电影响,再次通电后,编码器当前位置的编码不变,例如,当前位置编码为0111,系统就知道电动机停电前处于1/2周位置。
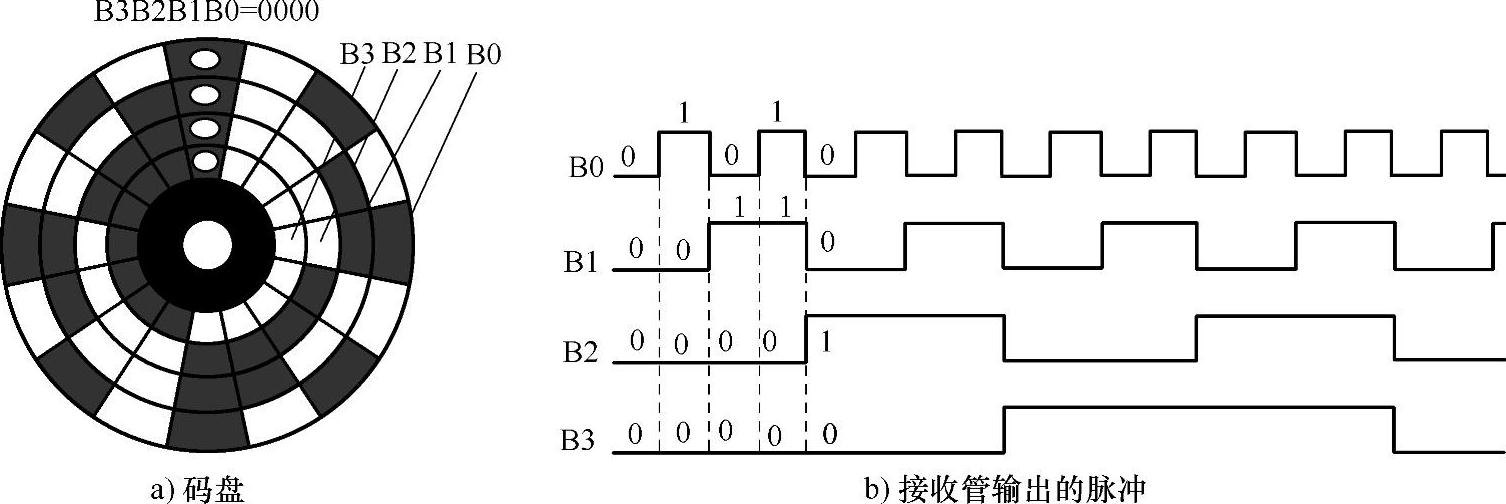
图6-114 位二进制单圈绝对值编码器
(2)多圈绝对值编码器
单圈绝对值编码器只能对一个圆周进行定位,超过一个圆周定位就会发生重复,而多圈绝对值编码器可以对多个圆周进行定位。
多圈绝对值编码器的工作原理类似机械钟表,当中心码盘旋转时,通过减速齿轮带动另一个圈数码盘,中心码盘每旋转一周,圈数码盘转动一格,如果中心码盘和圈数码盘都是4位,那么该编码器可进行16周定位,定位编码为00000000~11111111,如果圈数码盘是8位,编码器可定位256周。
多圈绝对值编码器的优点是测量范围大,如果使用定位范围有富裕,在安装时不需要找零点,只要将某一位置作为起始点就可以了,这样能大大简化安装调试难度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。