



HM275D型步进驱动器的脉冲输入模式有单脉冲和双脉冲两种。脉冲输入模式由SW5开关来设置,当SW5为OFF时为单脉冲输入模式,即脉冲+方向模式,PUL端定义为脉冲输入端,DIR定义为方向控制端;当SW5为ON时为双脉冲输入模式,即脉冲+脉冲模式,PUL端定义为正向(CW)脉冲输入端,DIR定义为反向(CCW)脉冲输入端。
单脉冲输入模式和双脉冲输入模式的输入信号波形如图5-15所示,下面对照图5-9a来说明两种模式的工作过程。
当步进驱动器工作在单脉冲输入模式时,控制器首先送高电平(控制器内的晶体管截止)到驱动器的R/S-端,R/S+、R/S-端之间的内部光耦合器不导通,驱动器内部电路被允许工作;然后控制器送低电平(控制器内的晶体管导通)到驱动器的DIR-端,DIR+、DIR-端之间的内部光耦合器导通,让驱动器内部电路控制步进电动机正转;接着控制器输出脉冲信号送到驱动器的PUL-端,当脉冲信号为低电平时,PUL+、PUL-端之间的光耦合器导通,当脉冲信号为高电平时,PUL+、PUL-端之间的光耦合器截止,光耦合器不断导通、截止,就可以为内部电路提供脉冲信号,在R/S、DIR、PUL端输入信号控制下,驱动器控制电动机正向旋转。
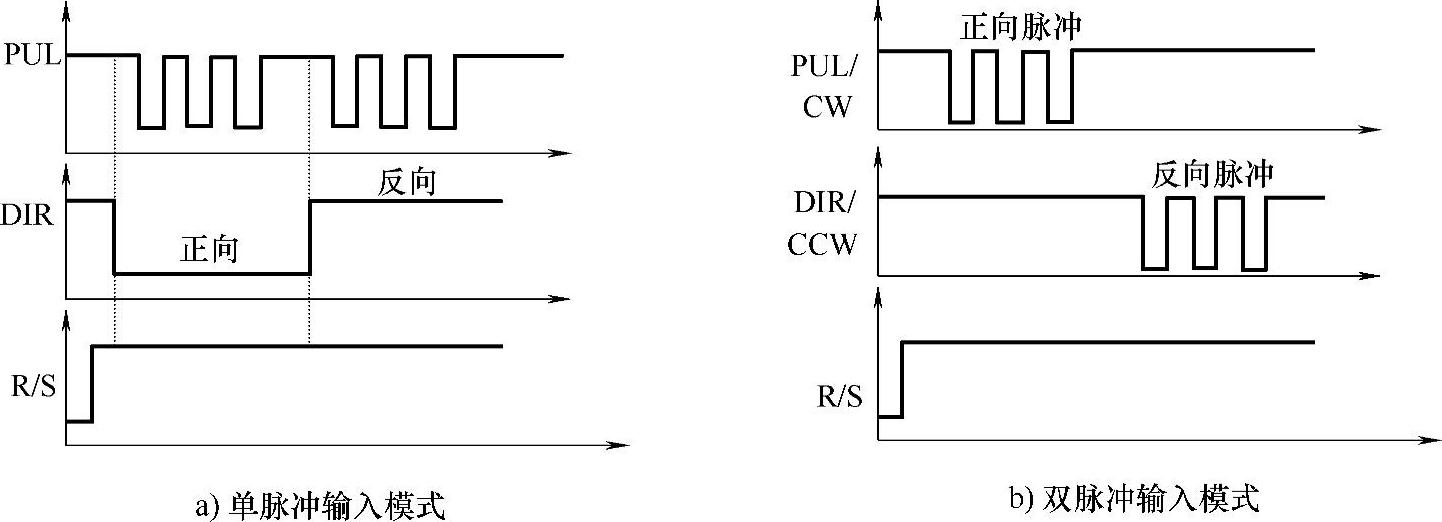
图5-15 两种脉冲输入模式的信号波形
当步进驱动器工作在双脉冲输入模式时,控制器先送高电平到驱动器的R/S-端,驱动器内部电路被允许工作;然后控制器输出脉冲信号送到驱动器的PUL-端,同时控制器送高电平到驱动器的DIR-端,驱动器控制步进电动机正向旋转;如果驱动器PUL-端变为高电平、DIR-端输入脉冲信号,驱动器则控制电动机反向旋转。(https://www.xing528.com)
为了让步进驱动器和步进电动机均能可靠运行,应注意以下要点:
1)R/S要提前DIR至少5μs为高电平,通常建议R/S悬空。
2)DIR要提前PUL下降沿至少5μs确定其状态高或低。
3)输入脉冲的高、低电平宽度均不能小于2.5μs。
4)输入信号的低电平要低于0.5V,高电平要高于3.5V。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。