



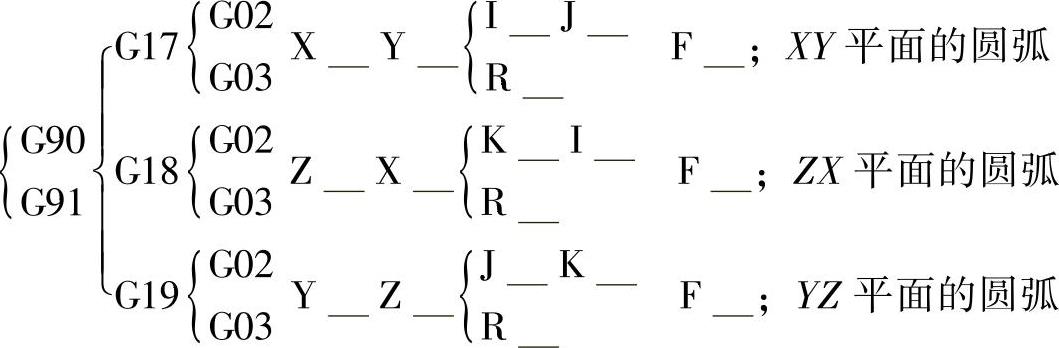
指令格式:
其中:
①在G90方式下,X、Y、Z为圆弧终点坐标;在G91方式下,X、Y、Z为圆弧终点相对于圆弧起点的增量坐标值。
②R是圆弧半径,单位为mm。如果设圆弧所对的圆心角为θ,则有:当0°<θ≤180°时,R为正值;当θ=180°时,R可以是正值也可以是负值;当180°≤θ<360°时,R为负值;当θ=360°时,即为切削整圆。当X、Y、Z轴坐标值均被省略时,终点与起点位置相同,不能用R编程,因为经过同一点、半径为一固定值的圆有无数个,从圆的数学意义上讲,不能确定圆的惟一性,所以不能用R编程,只能用I、J、K编程。如果θ=360°时,编写了半径为R的整圆,机床会认为此时圆的半径为0,而不产生移动,如“G02/G03 R_;”。
③I、J、K为圆心分别在X、Y、Z轴相对于圆弧起点的增量坐标,即I=(X圆心-X圆弧起点),J=(Y圆心-Y圆弧起点),K=(Z圆心-Z圆弧起点),和G90、G91无关。当I、J、K值为0时可以省略,单位为mm。
④I、J、K和R同时编写的程序段,以R指令的半径值为优先,I、J、K被忽略。
⑤如果用R指定圆心角接近180°的一段圆弧,中心坐标的计算会产生误差。在这种情况下,用I、J、K指定圆弧中心。
⑥如果指定了不在指定平面的轴,就会产生PS0028报警。例如,指定G17平面时,指定了与X轴平行的U轴。
⑦I、J、K和R的关系为:在G17平面,I2+J2=R2;在G18平面,I2+K2=R2;在G19平面,J2+K2=R2。
⑧圆弧插补的进给值等于由F代码指定的进给值,且是沿圆弧切线方向。指定的进给值和实际进给值的误差在±2%之内。该指定的进给值是在进行了刀具半径补偿后沿圆弧上测得的速度值。
该指令使刀具沿着圆弧运动,切出圆弧轮廓。圆弧插补运动有顺、逆之分,G02为顺时针圆弧插补指令(CW),G03为逆时针圆弧插补指令(CCW)。按照ISO国际标准组织的定义,顺、逆圆弧插补运动的判断方法是,按右手直角坐标系判定:大拇指指向X轴正方向,食指指向Y轴正方向,中指指向Z轴正方向,观察者从垂直于圆弧所在平面的第三轴的正方向向负方向看去,进给方向顺时针转动的为顺圆,反之为逆圆,如图3-18所示。G02、G03可以省略写成G2、G3。

图3-18 圆弧的顺逆
【例3-9】 如图3-19所示,编程如下:
①从A点顺时针转1/4周到A′点:
G90 G02 X0 Y-10.R10.F300;或
G90 G02 X0 Y-10.I-10.F300;或
G91 G02 X-10.Y-10.R10.F300;或
G91 G02 X-10.Y-10.I-10.F300;
②从B点逆时针转1/2周到B′点:
G90 G03 X0 Y-20.J-20.F300;或
G91 G03 Y-40.J-20.F300;
不建议使用R来编写圆心角接近180°的圆弧/半圆。
③从C点顺时针转3/4周到C′点:
G90 G02 X0 Y-30.R-30.F300;或
G90 G02 X0 Y-30.I30.F300;或
G91 G02 X30.Y-30.R-30.F300;或
G91 G02 X30.Y-30.I30.F300;

图3-19 圆弧插补举例
④从D点逆时针转一周到D′(D)点:
G03 J40.F300;
1.圆弧的半径差
有些初学者自己编的程序是这样的:
……
G17 G90 G01 X13.Y74.F200;(https://www.xing528.com)
G03 X47.Y28.R26.0 F150;
……
乍一看,程序编写得很好,没有什么问题,实际上错误很大,而且这种错误还是隐藏的。先分析一下所描述的两点之间的距离,根据两点间的距离公式,可以算出两点间距离
 (参看附录C),而根据圆在数学上的定义,只有当这段距离是圆的直径时,此时圆的半径r才最小,为r=d/2=28.6007mm,而26.0mm<28.6007mm,不符合圆在数学上的定义,如果在圆弧起点和终点之间半径差2.6007mm大于或等于参数No.3410中的设定值(该值由机床厂商设定,一般为0~30μm,如果该值设为0,不进行圆弧半径差的检查),机床就会产生PS20报警信息,超出半径公差。如果终点不在圆弧上,会成为图3-20所示的螺旋,即圆弧半径按照圆心角θ(t)成线性变化。通过指定起点处的圆弧半径和终点处的圆弧半径不同的圆弧指令,即可进行螺旋插补。在进行螺旋插补的情况下,应在圆弧半径误差极限值的参数No.3410中设定较大的值。
(参看附录C),而根据圆在数学上的定义,只有当这段距离是圆的直径时,此时圆的半径r才最小,为r=d/2=28.6007mm,而26.0mm<28.6007mm,不符合圆在数学上的定义,如果在圆弧起点和终点之间半径差2.6007mm大于或等于参数No.3410中的设定值(该值由机床厂商设定,一般为0~30μm,如果该值设为0,不进行圆弧半径差的检查),机床就会产生PS20报警信息,超出半径公差。如果终点不在圆弧上,会成为图3-20所示的螺旋,即圆弧半径按照圆心角θ(t)成线性变化。通过指定起点处的圆弧半径和终点处的圆弧半径不同的圆弧指令,即可进行螺旋插补。在进行螺旋插补的情况下,应在圆弧半径误差极限值的参数No.3410中设定较大的值。

图3-20 圆弧起点和终点的半径差
2.任意角度的倒角/倒圆角
可以在直线插补与直线插补之间、直线插补与圆弧插补之间、圆弧插补与直线插补之间、圆弧插补与圆弧插补之间自动插入倒角程序段和倒圆角程序段。
指令格式:

说明:当在指定直线插补(G01)或圆弧插补(G02、G03)程序段的末尾指定上述格式时,则插入一个倒角程序段或倒圆角程序段。
可以连续指定两个以上的倒角程序段和倒圆角程序段。
①倒角。紧跟在C后的数值指定从假想拐角交点起的倒角起点到终点的距离,所谓假想拐角就是不进行倒角时假设存在的拐角。倒角如图3-21所示。
a.G91 G01 X100.0,C10.0;
b.X100.0 Y100.0;
②倒圆角。紧跟在R后的数值指定倒圆角的半径。倒圆角如图3-22所示。
a.G91 G01 X100.0,R10.0;
b.X100.0 Y100.0;
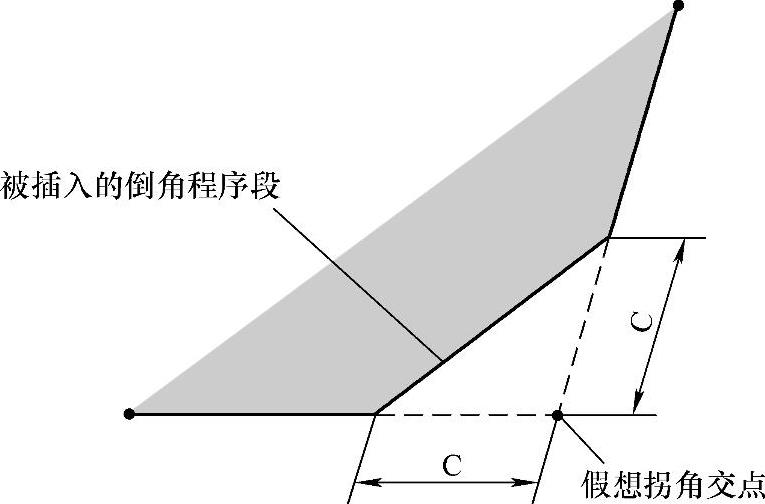
图3-21 倒角
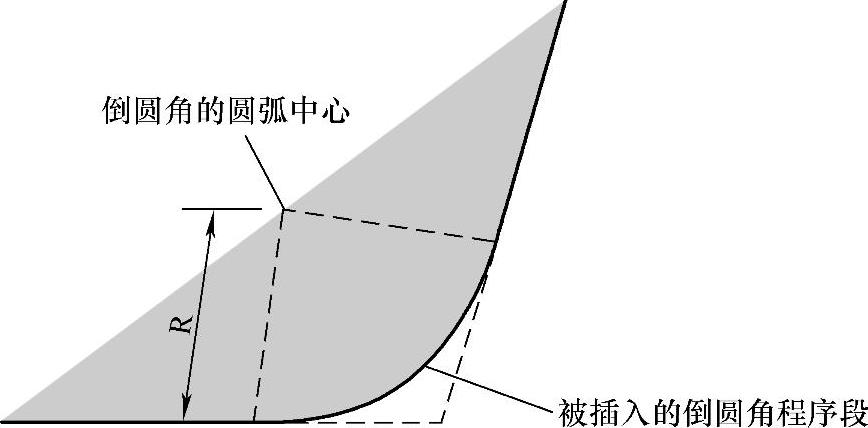
图3-22 倒圆角
【例3-10】 如图3-23所示,编写其程序。
程序为:
N001 G55 G00 G90 X0 Y0;
N002 G00 X10.0 Y10.0;
N003 G01 X50.0 F10.0,C5.0;
N004 Y25.0,R8.0;
N005 G03 X80.0 Y50.0 R30.0,R8.0;
N006 G01 X50.0,R8.0;
N007 Y70.0,C5.0;
N008 X10.0,C5.0;
N009 Y10.0;
N010 G00 X0 Y0;
N011 M30;

图3-23 倒角和倒圆角应用举例
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。