



增量式数字阀控制系统工作原理框图如图6-3所示。计算机的输出脉冲序列经驱动电源放大后,作用于步进电动机,使其工作。步进电动机每得到一个信号脉冲,便沿着控制信号给定的方向转动一个固定的步距角。步进电动机的转角通过机械转换器(齿轮减速)凸轮机构或螺纹等机构,转换成阀芯的直线位移,带动液压阀阀芯(或挡板)移动一定距离,阀口获得相应的开度。图6-3中双点画线框为增量式数字阀,所以增量式数字阀就是步进电动机驱动的液压阀。步进电动机是一个数字元件,根据增量控制方式工作。增量控制方式是由脉冲数调制法演变而成的一种数字控制方法,是在脉冲数字信号的基础上,使每个采样周期的步数在前一个周期的步数上,增加或减少一些步数,而达到需要的幅值。步进电动机转角与输入脉冲数成比例,步进电动机每得到一个脉冲信号,便得到与输入脉冲数成比例的转角,每个脉冲使步进电动机沿给定的方向转动一固定的步距角,再通过机械转换器(丝杠-螺母副或凸轮机构),使转角转换成轴向位移,带动阀芯移动相应的步数,得到与之相适应的阀口开度,从而获得与输入脉冲数成比例的压力、流量值。有时,阀中还设置有用以提高阀的重复精度的零位传感器和用以显示被控量的显示装置。
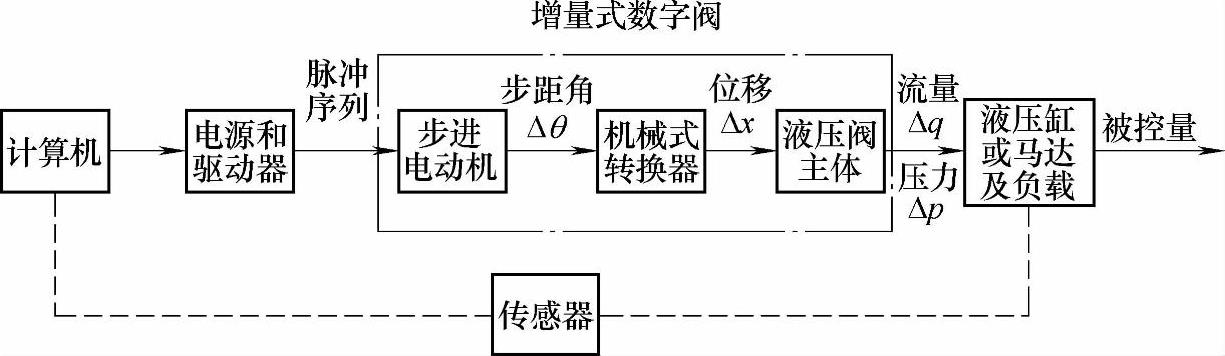
图6-3 增量式数字阀控制系统工作原理框图
图6-4是增量式数字阀的输入和输出信号波形图。如图6-4所示,阀的输出量与输入脉冲数成正比,输出响应速度与输入脉冲频率成正比。对于步进电动机的步距角,阀的输出量有一定的分辨率,它直接决定了阀的最高控制精度。
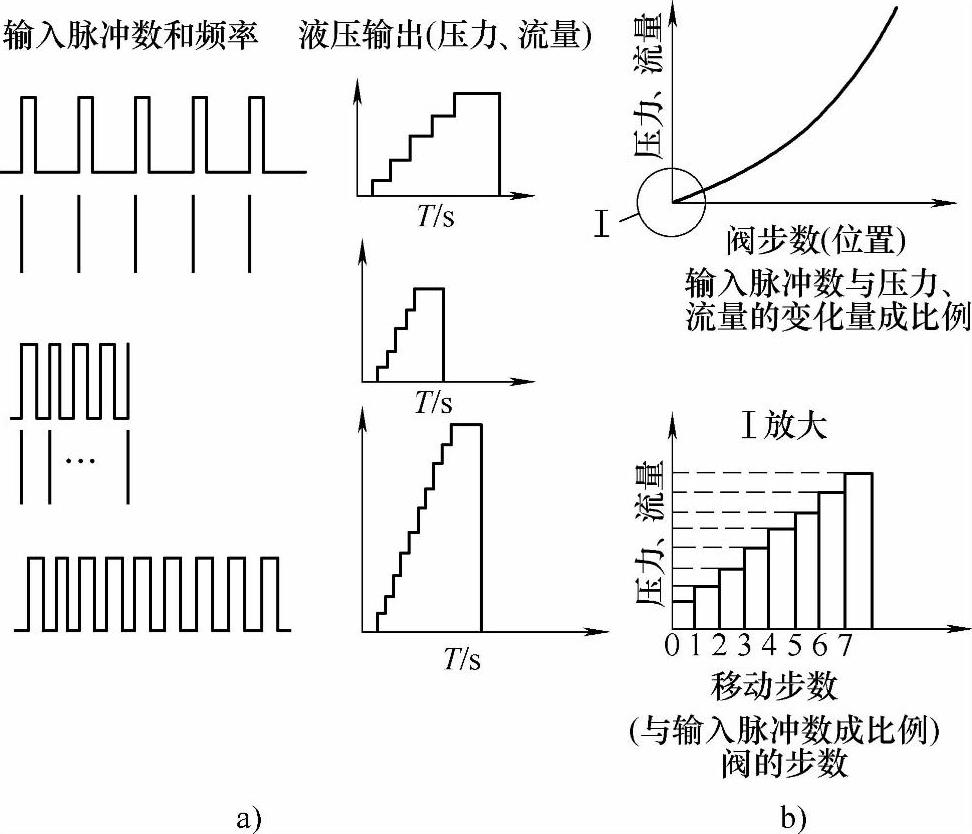
图6-4 增量式数字阀的输入和输出信号波形图
a)脉冲速率与液压输出的关系 b)输入输出特性
增量式数字阀的结构框图如图6-5a所示,它由四个主要部分组成。步进电动机接受脉冲序列控制,输出位移转角,转角与输入脉冲数成正比。通常要通过机械转换装置,一般为齿轮减速的凸轮机构或螺杆机构,把转角变成阀芯的位移,再经过先导级和功率级二级液压放大,输出液压参数,由于步进电动机的控制方式为步进的,对输入的脉冲数有记忆作用,并且输出量与累计的输入脉冲数量成比例,所以这种控制方式又称脉数调节(PNM)控制。
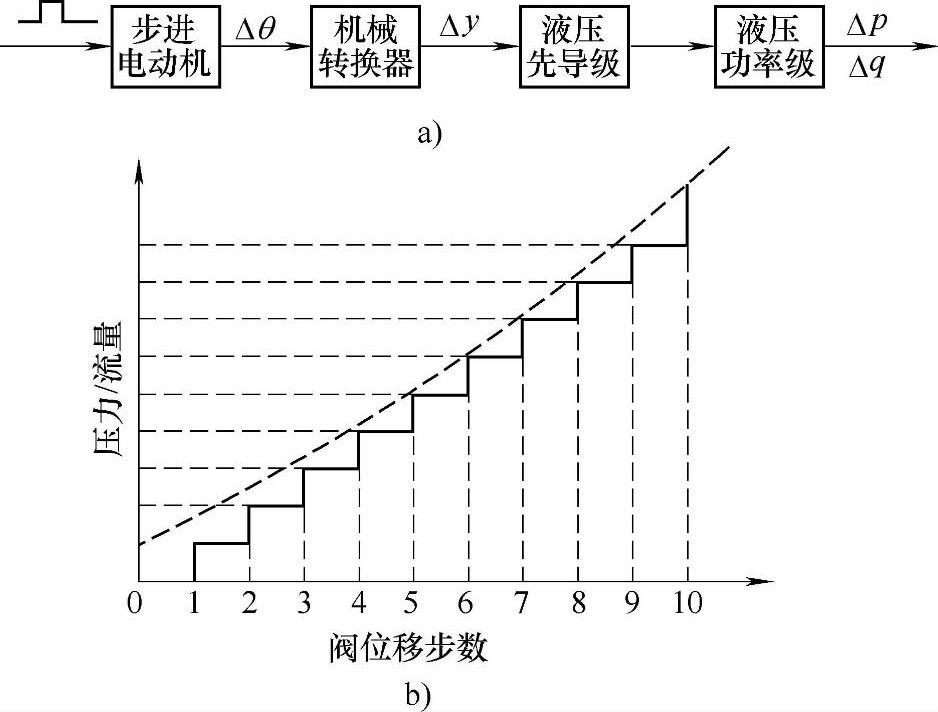
图6-5 增量式数字阀结构框图与控制特性
a)结构框图 b)增量控制阀特性(https://www.xing528.com)
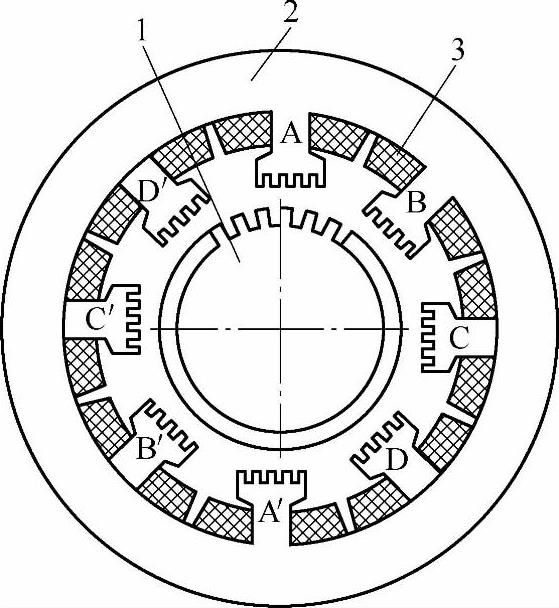
图6-6 步进电动机工作原理图
1—转子铁心 2—定子铁心 3—定子绕组
实际上,每一采样周期的步数是在原有采样周期的基础上增加或减少一些步数来实现,因此PNM的控制方式已演化为增量控制方式,从而达到需要的幅值。这种在前一次控制的基础上,增加或减少一些脉冲数(反向控制)以达到控制目的的方法称为增量控制法。如图6-5b所示,设步进电动机当前状态的移动步数为4,对应的阀芯位移也设为4,如果希望工作点移到阀芯位置为5的位置上,这时的输入控制量应为它们之间的增量,即5-4=1个脉冲量,使步进电动机继续向前转过一个步距角。反向控制时,情况也是一样的,但这时输入的是负的脉冲,用这种方法进行控制的阀,准确地说应称为增量式数字阀。
从图6-5a中可知,步进电动机是数字阀的组成部分。它是一种D/A转换型的电—机转换器,利用电磁作用原理工作,接受电脉冲信号,而输出脉冲型机械转角,最后使液压阀在脉冲流体控制下工作。图6-6是四相反应式步进电动机工作原理图,它由定子和转子组成,转子是一导磁体,定子是由绕有A、B、C、D四相励磁绕组的四对极靴构成,当定子得到脉冲信号,各相绕组依次通电时,利用转子和定子间的径向间隙吸力使转子被吸合,促使转子一步步转动,输出转角与输入脉冲数严格成比例。在时间上转角与输入脉冲同步,即转速与输入信号的脉冲频率有关。转子每一步的转角称为步距角。为使步进电动机得到较小的步距角,在定子的每一极上和转子的外周上分割出若干小的轮齿,并且定子相邻极靴上的齿,在周向错开1/4齿距。若脉冲分配器按A—B—C—D顺序向各相依次通电,转子每步转动至其某齿轴线和通电定子极靴中心齿轴线对齐位置。除上述依A—B—C—D顺序的四相单四拍运行方式外,步进电动机的通电运行方式有依A—AB—B—BC—C—CD—D—DA顺序的四相八拍和AB—BC—CD—DA的四相双四拍的运行方式。步进电动机的步距角

式中 m——定子绕组相数;
z——转子齿数;
k——通电运行方式系数,四拍供电k=1,八拍供电k=2。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。