



现以塑料注射机的插装阀液压集成系统为例,说明该系统是如何由典型的基本回路集成块构成块式集成系统的。
塑料注射机主要由合模机构、注射机构和注射移动机构等部分组成。合模机构的主要任务是在注射时使模具保持严格的闭合状态,在注射后使模具开启,并顶出工件,有的还有机械或液压的抽芯装置。注射机构的作用是将塑化后的塑料注射入模腔,它有活塞式、螺杆式和螺杆活塞式之分,其中较先进的是螺杆活塞式结构。它是靠螺杆的旋转将塑化后的原料送到螺杆的前面,又把这螺杆当做活塞,把原料射入模具中的型腔。为了便于调速,螺杆的旋转依靠液压马达带动,而螺杆的注射动作由液压缸来完成。注射部分移动机构是将注射机构移至固定模板,使注射口对上模具型腔的进口以待注射的。
它的液压控制系统可分成四个部分:动力控制回路集成块、合模机构控制回路集成块、注射机构控制回路集成块、注射部分移动机构控制回路集成块。
1.动力控制回路集成块
如图5-29所示,它由两个插装阀3、4(阀芯都带阻尼孔)、两个先导调压阀5、6,两个先导电磁换向阀7、8,梭阀9,比例先导调压阀10,以及两个单向阀11、12组成,其中阀5、6、7、8、9、10构成先导控制部分。分别对定量泵1和2进行控制,可实现多级调速并使系统得到三种不同的流量,既可调压、卸荷,也可控制流量。
2.合模机构控制回路集成块
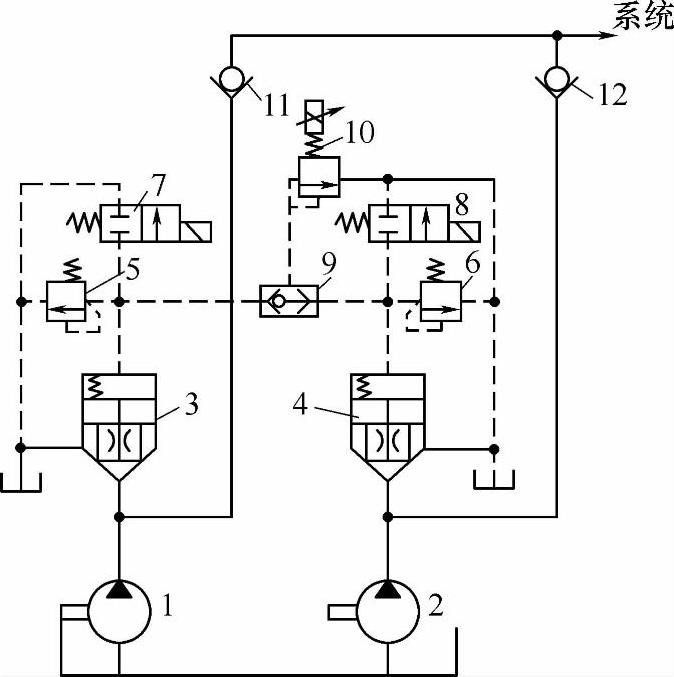
图5-29 动力控制回路集成块
1、2—液压泵 3、4—插装阀 5、6—先导调压阀 7、8—电磁换向阀 9—梭阀 10—比例先导调压阀 11、12—单向阀
如图5-30所示,它由4个插装阀1、2、3、4(其中1、4带阀芯行程调节装置),两个先导电磁换向阀5、6,四个单向阀7、8、9、10,梭阀11及两个先导调压阀12、13组成,其中阀5、6、11、12、13构成四个插装阀的先导控制部分,分别对合模缸的合模、开模、顶出工件等动作进行控制,可以实现压力、方向、流量控制。其中考虑增加了使合模和回程所调整的流量不受压力波动的影响而保持恒定的回路,如图5-31所示,它由滑阀式插装阀1、液动换向阀2和梭阀3组成。插装阀1对图5-30中阀1和阀4分别起压力补偿作用。为了保证操作人员的人身安全,在图5-32的A、C两点间考虑接一个安全保护用的液控单向阀回路。
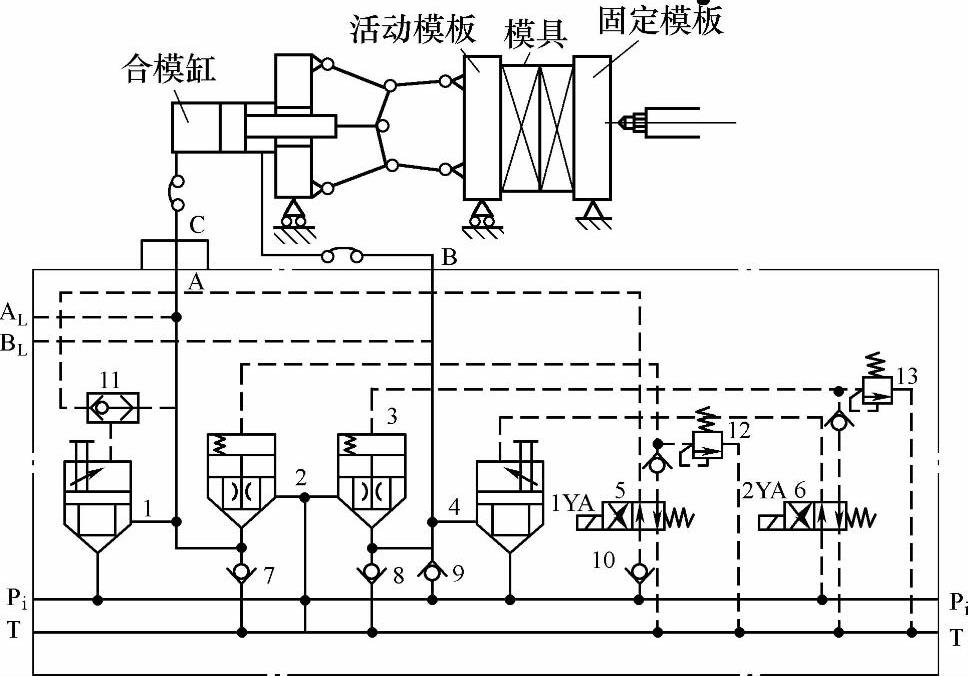
图5-30 合模机构控制回路集成块
1、2、3、4—插装阀 5、6—电磁换向阀 7、8、9、10—单向阀 11—梭阀 12、13—先导调压阀
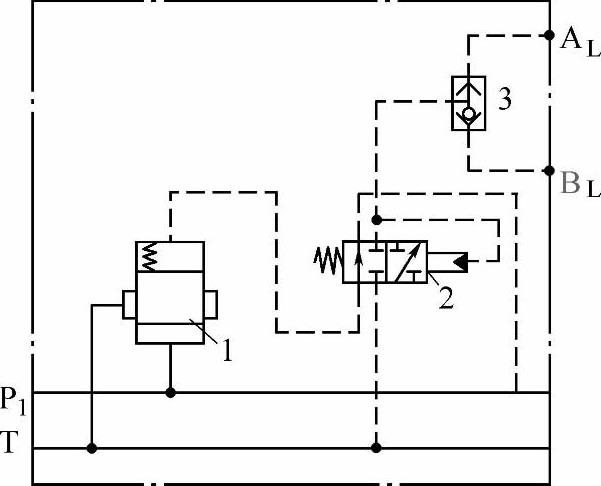
图5-31 流量调节的压力补偿回路集成块(https://www.xing528.com)
1—插装阀 2—液动换向阀 3—梭阀
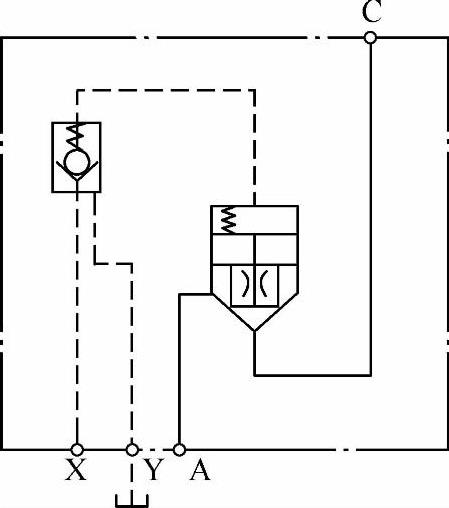
图5-32 安全防护用的液控单向阀回路集成块
3.注射机构控制回路集成块
注射机构控制回路集成块如图5-33所示。图5-33a所示为注射缸动作的控制回路,它由四个插装阀1、2、3、4,两个电磁换向阀5、6,梭阀7,比例先导电磁阀8,先导调压阀9,吸入阀10组成,其中阀5、阀6、阀8、阀9分别为阀1、阀2、阀3、阀4的先导控制部分,从而实现注射缸系统方向、流量、压力的控制。图5-33b所示为螺杆旋转控制回路,它实际上是由两个插装阀11和12构成的一个带压力补偿的流量控制阀,通过它可以实现注射缸退回。如果在注射缸进行注射的同时,需要螺杆旋转,同时进行注射,以加快注射速度或增加一次注射的体积,则采用图5-33c所示的螺杆旋转控制回路。与图5-33b比较,图5-33c增加一个滑阀式插装阀14,电磁换向阀15是它的先导阀。
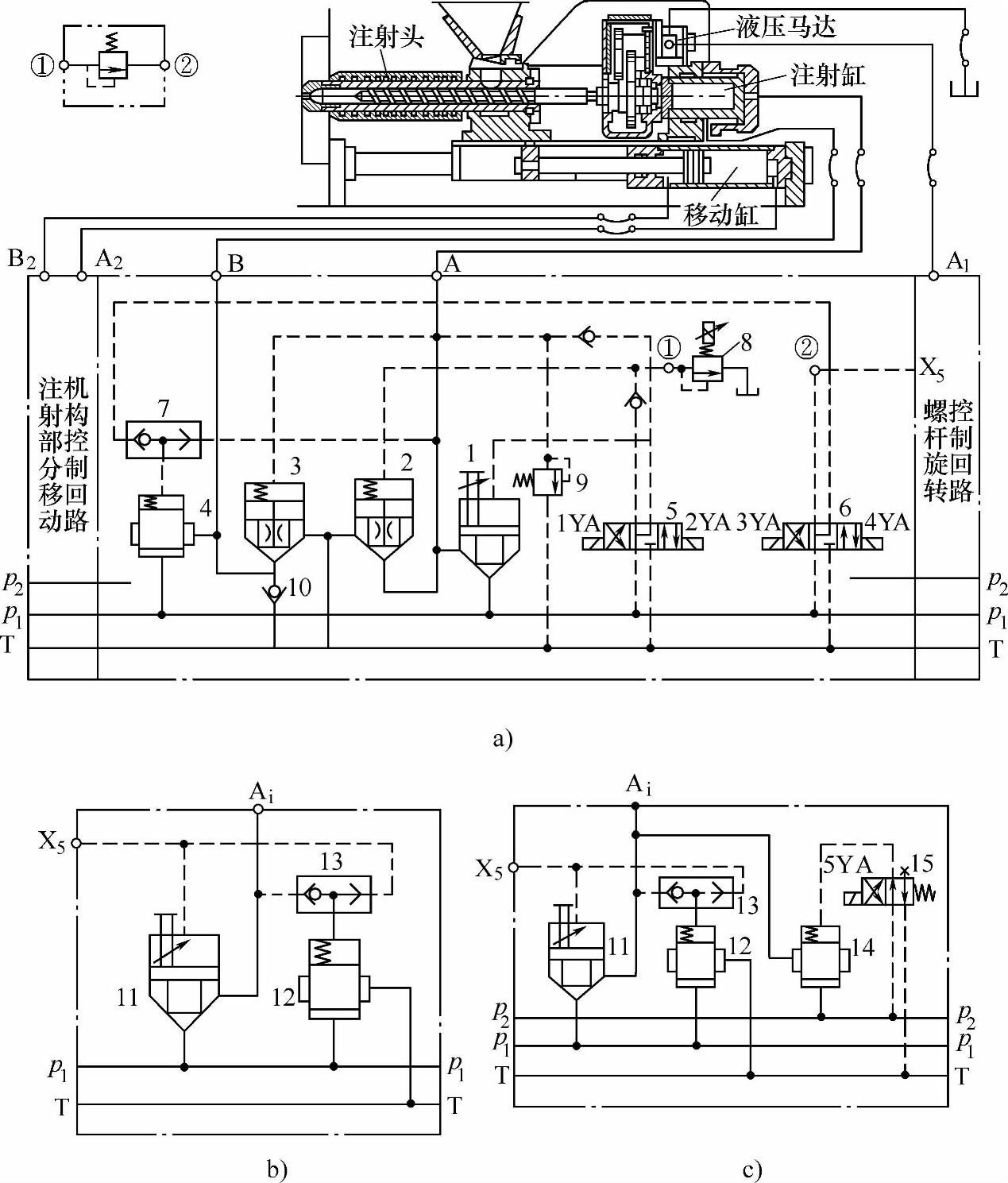
图5-33 注射机构控制回路集成块
a)注射缸控制回路集成块 b)螺杆旋转控制回路集成块Ⅰ c)螺杆旋转控制回路集成块Ⅱ 1、2、3、4、11、12、14—插装阀 5、6、15—电磁换向阀 7、13—梭阀 8—比例先导电磁换向阀9—先导调压阀 10—吸油阀
4.注射部分移动机构控制回路集成块
如图5-34所示,它由四个插装阀1、2、3、4,电磁换向阀5,减压阀6,液控单向阀7,梭阀8组成。其中5、6、7为先导控制部分,可实现压力、方向控制,使移动缸完成前进、后退和停止三个动作。
各个回路集成块一般采用立式的方法把它们叠装起来,叠装的顺序尽量按照各集成块所控制的各执行元件每个腔的实际位置进行,一般液压泵控制回路块放在最下面,这样使集成块和被控制油腔的对应关系明确,便于调试和维修,同时配管时可避免交叉,使管路系统更加整齐、美观。最后,在系统上面还要用一盖板,以封闭公共通道P和T,下面用一底座连接来自液压泵的进油管和通油箱的回油管。经集成后,阀间完全实现了无管道连接。
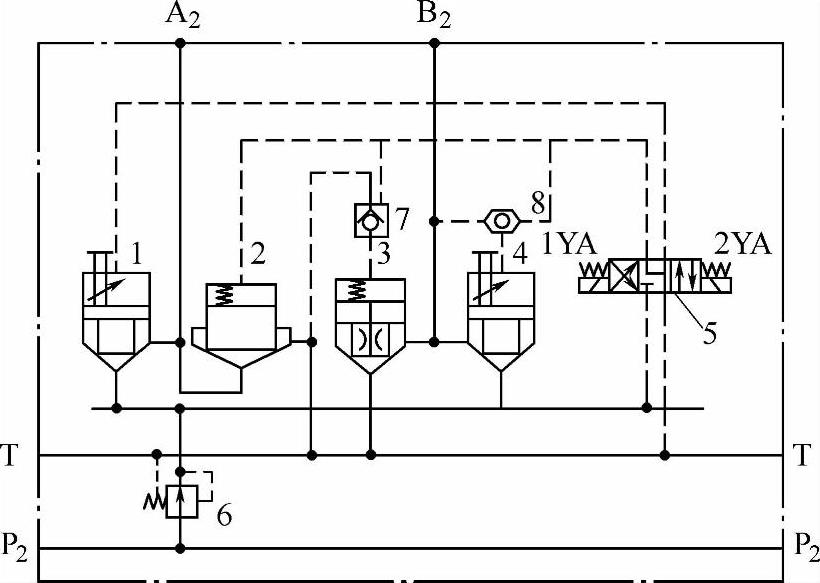
图5-34 注射部分移动机构控制回路
1、2、3、4—插装阀 5—电磁换向阀 6—减压阀 7—液控单向阀 8—梭阀
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。