



对于手动部分梯形图程序,因其比较简单,可根据被控对象对控制系统的具体要求,通过与控制输出有关的所有输入变量的逻辑关系,直接画出梯形图,再通过不断的分析、调试、修改来完善、简化程序。
对于PLC控制系统的顺序控制部分,一般采用顺序控制设计法来设计梯形图程序。首先应画出PLC顺序控制系统的功能表图,再根据功能表图和PLC所具有的编程功能,选择一种尽可能简单的编程方式,来编制顺序控制部分的梯形图程序。本例主要以步进梯形指令编程方式为主编制PLC控制系统梯形图程序。
1.PLC控制系统梯形图程序总体结构
一般PLC控制系统梯形图程序总体结构由通用程序、返回原位程序、手动操作程序和自动控制程序组成。由于返回原位程序可以用手动操作方式来完成,所以,一般情况下可不设置返回原位操作方式(控制系统也可以只有自动部分的程序)。对于这样具有手动操作方式和自动操作方式的PLC控制系统梯形图总体结构可设计为如图5-26所示的工作方式区分选择电路。设计这种总体结构的关键是利用跳转换指令和转换开关来控制PLC是执行手动程序还是执行自动程序。
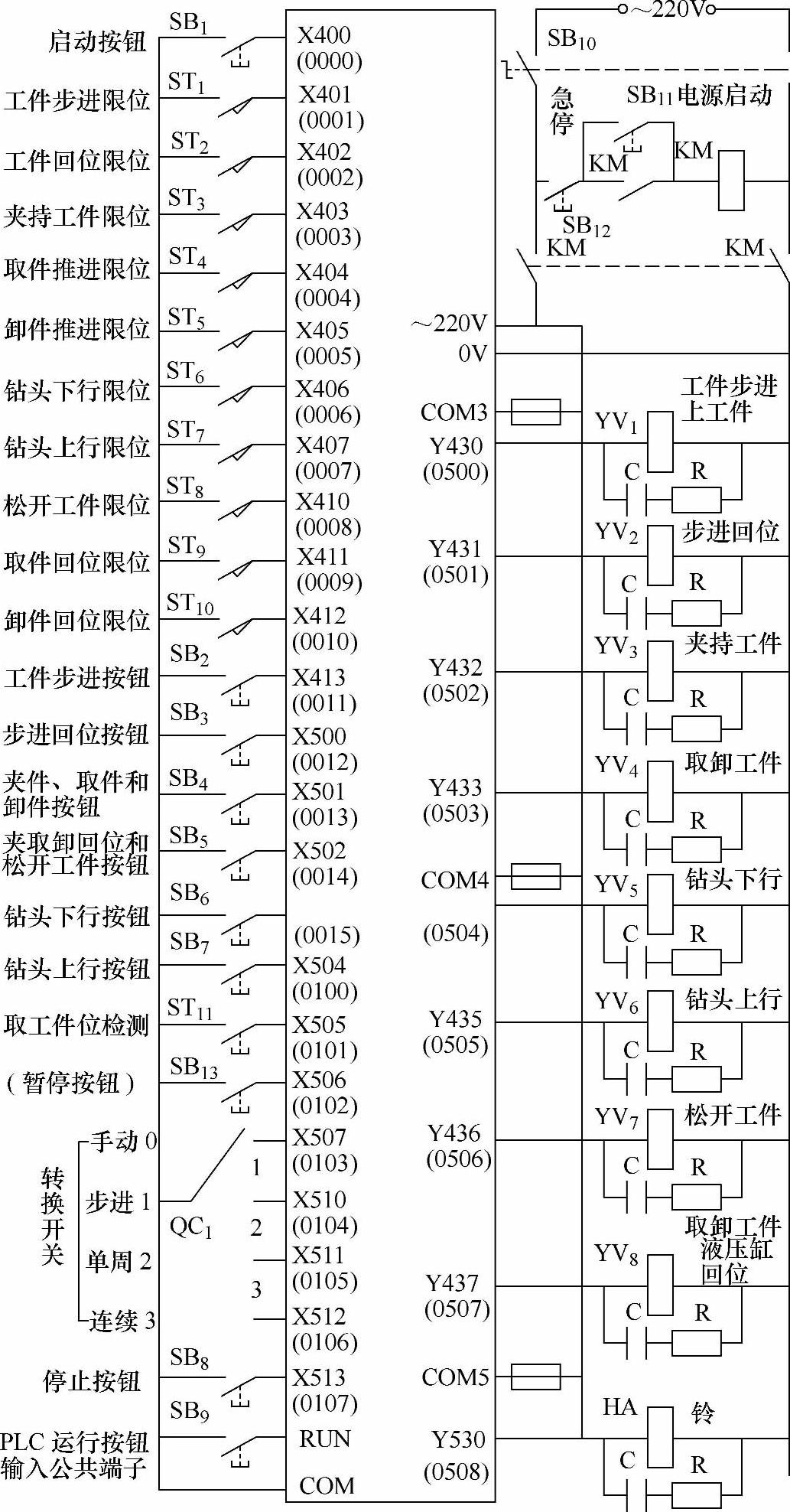
图5-25 选定F1-40MR(或FX2N-48MR)进行龙门钻床控制的PLC I/O端子实际接线图
当选择工作方式转换开关QC1(见图5-25)处于自动工作方式位置时(指步进或单周期或连续工作方式),选择开关在手动工作位的常开触点QC1.0(QC1-0、QC1-1、QC1-2、QC1-3为QC1的4组转换触点)必然是断开的,这样可使与之对应的输入继电器X507手动(转)的常闭触点接通,从而使CJP700也接通,执行CJP700跳转指令,跳过手动程序执行自动程序。
当转换开关QC1处于手动工作位时,手动工作位的QC1-0常开触点闭合,与之对应的PLC输入继电器X507手动(转)常开触点闭合,而常闭触点断开,此时不执行CJP700跳转指令,而是执行手动操作程序。在执行完手动操作程序后,因为此时X507常开触点闭合,执行CJP701跳转指令,则跳过自动程序不执行,一直到执行END结束指令之后又返回重新从头执行程序。这样设计的目的是为了减少程序执行时间。
当以步进梯形指令为主编制PLC控制系统梯形图程序时,通用程序由状态器初始化、状态器转换启动和状态器转换禁止3个程序组成。
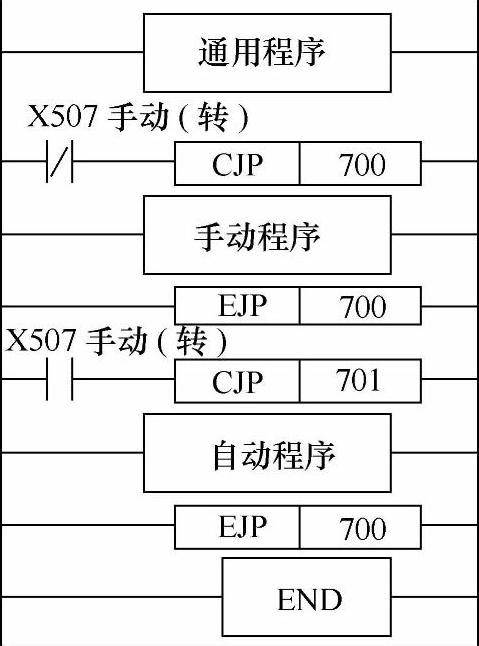
图5-26 工作方式区分选择电路
2.自动钻床PLC控制系统的功能表图
在编制PLC控制系统梯形图程序之前,应先画出PLC控制系统顺序控制部分的功能表图,再由功能表图画出梯形图程序。
为了编制梯形图时方便,PLC控制系统顺序控制部分的功能表图的画法与图5-24钻床工作过程的功能表图的画法有所不同。因图5-24所示功能表图中的动作(或命令)是由PLC所对应的输出继电器控制,所以,其动作(或命令)可以由PLC所对应的输出继电器的编号来代替,其旁边可加动作(或命令)的注解。在图5-24所示功能表图中的按钮、限位开关等转换元件也对应着PLC的输入继电器编号,所以,一般这些转换元件也由PLC所对应的输入继电器编号来代替。这种关于动作(或命令)和转换元件在PLC控制系统的顺序控制部分的功能表图中,由PLC相对应的输出或输入继电器编号代替的方法,适合于各种编程方式所需要绘制的功能表图。
当以步进梯形指令编制顺序控制梯形图程序时,图5-24所示功能表图中的步序号需用状态器来代替。根据所需步数来确定所用状态器数量。对于F1系列PLC状态器编号可在S600~S647范围内选用。其编号也可不按顺序排列选用,如第三步用S602状态器,第四步用S603状态器,但也可用S604或S607等代替。
根据上述说明,可以画出龙门钻床PLC控制系统顺序控制部分的功能表图,如图5-27所示。
在图5-27所示功能表图中,S601步和S604步加响铃定时和电铃两个动作。当用步进梯形指令编制顺序控制程序时,从初始步到S601步的进展由M575专用辅助继电器控制其转换。在S603步动作框内的S和Y432用于表示动作为保持型的,即当S603步变为动步时,Y432输出(夹待工件),当S603由动步变为静步时,Y432还保持输出,一直到S606步变为动步时,才将Y432复位断开。
另外需特别注意,在这里所说的顺序控制程序就是自控程序部分。
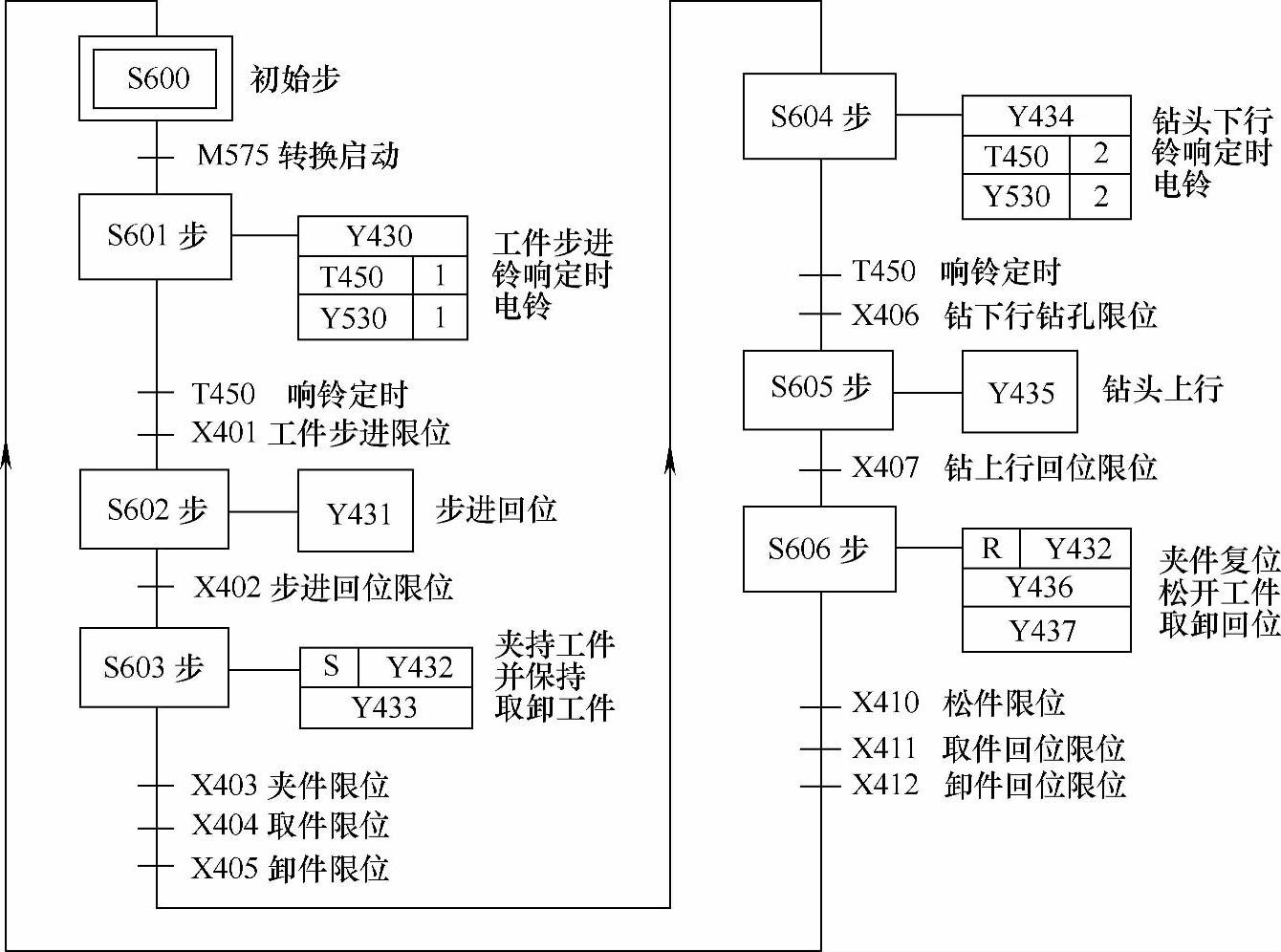
图5-27 龙门钻床PLC控制系统顺序控制部分的功能表图
3.初始步和中间步状态器的初始化梯形图程序(通用程序部分)
以步进梯形指令编程方式为主编制梯形图程序时,在通用程序部分要对PLC控制系统的功能表图中所用的初始步和中间工作步的状态器进行初始化处理(将状态器处理成工作开始所需要的初始状态)。
初始化程序一般包括两部分:一是对初始步状态器的置位或复位处理。在F1系列PLC中,一般将S600状态器作为初始步的状态器,当然也可以用其他状态器作为初始步的状态器。二是将表示中间步的状态器复位。本案例中中间工作步为S601~S606(见图5-27)。
本案例中初始步状态器S600是在原位条件被满足和中间步状态器复位的情况下才被置位。当S600置位后,如果系统工作在自动方式,按功能表图所示,可以通过转换条件的建立,使S600进展到下一步(本例中为S601),使下一步(S601)变为动步,同时S600被自动复位。此后随着工作过程的不断进展(按功能表图进展)依次进入下一步的转换,一直到一个循环过程结束,之后初始步状态又被置位,可进行下一个循环的工作。
但在手动工作方式时,必须对初始步的状态器S600复位,防止由于初始步状态器S600被置位后一直保持。此时,如果手动操作使系统不在原位状态,而又将手动工作方式转换为自动工作方式,则S600初始步会向下一步S601步进展而进入自动控制状态。但因此时系统不是在原位状态下开始工作,则会使工作过程错乱,这种情况下也可能出现事故。所以,在手动工作方式时必须将初始步状态器复位。
对于中间工作步的状态器(本案例中为S601~S606),在手动操作方式时,也必须将其复位。因为中间步的某一状态器被置位后又转到手动操作方式时,其置位状态仍被保持,此时如手动操作使机器处于原位状态,而又使初始步S600置位后,当工作方式又转到自动位时,可能会形成S600步向下一步和中间某一被置位保持的步也向下一步转换的情况。这样会使程序运行错乱。所以,对于中间步的状态器在手动工作方式下也必须作复位处理。同时,对S600的置位,也要加上中间步处于不工作的复位状态这一条件。
通过上述解析,可以画出初始步和中间步状态器初始化梯形图程序,如图5-28所示。
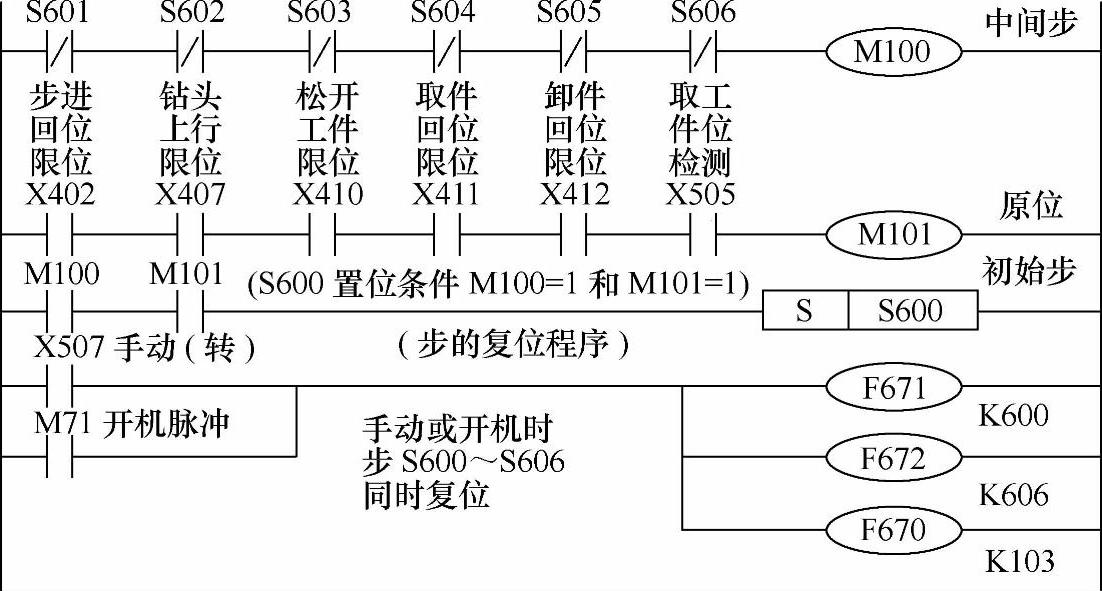
图5-28 初始步和中间步状态器初始化梯形图程序
在图5-28中,利用所有中间状态器处于复位状态(其线圈末接通,常闭触点闭合)作为初始步S600置位条件之一。这样做的目的是:当执行自动程序时,中间步状态器必然有一个以上处于动步工作状态,其常闭触点此时必然是断开的,不能使M100接通,也就不能使初始步S600置位,这时即使误按启动按钮,也不可能作另外一次不正常的启动。
原位条件也是初始步置位条件之一。在钻床控制中,原位条件是所有液压缸回位、液压缸回位限位开关常开触点闭合、同时取工件位准备好工件。
在图5-28中,当系统工作在手动工作方式时,要利用工作方式选择开关QC1在手动位时(X507常开触点闭合),使初始步状态器S600复位(复位优先执行)。
中间步状态器的复位也是利用工作方式选择开关QC1(转换开关)在手动位(X507常开触点闭合)使之复位。因状态器有断电保持功能,所以,表示步的状态器的复位应利用专用辅助继电器M71在PLC上电时所产生一个扫描周期的脉冲功能来给表示步的状态器复位。如果中间步状态器要在恢复供电时,从掉电前条件开始继续工作则不需要M71。
在图5-28中,F670 K103是对指定范围内的Y、S、M编程元件同时复位的功能指令。由设定线圈F671和在其后面的K后常数设定复位起始的编程元件编号,由设定线圈F672和在其后面的K后常数设定复位结束的编程元件编号。K后常数为编程元件编号的号码,表示继电器类型的字母一律用符号K代表。本例中同时复位的范围是状态器S600~S606。
4.表示步的状态器转换启动和转换禁止梯形图程序(通用程序部分)
F1系列PLC有两个专供步进梯形指令和状态器编制顺序控制程序的专用辅助继电器M575和M574。利用这两个专用辅助继电器可编制顺序控制功能表图中表示步的状态器的转换启动和转换禁止。还可通过对M575、M574编程实现手动和自动工作方式中步进、单周期、连续工作方式的选择。(https://www.xing528.com)
M575用于对表示步的状态器的转换启动。M575线圈接通一次,则对PLC状态器的自动转换系统启动一次。M575相当于是PLC状态器自动转换系统的启动按钮。初始步S600向下步(如S601)的转换要通过M575的常开触点的闭合来实现。
M574用于对表示步的状态器的自动转换禁止。当用步进梯形指令控制表示步的状态器向下一步状态器转换时,如果M574线圈被接通,则这种表示步的所有状态器的自动转换就被禁止。只要M574接通,即使转换启动M575接通,转换也被禁止。
表示步的状态器的转换启动和转换禁止的梯形图程序见图5-29,该图也属于通用部分程序。在图5-29中,手动(转)或步进(转)或单周期(转)或连续(转)是指PLC选择工作方式的转换开关在其对应位的输入继电器常开、常闭触点。其程序功能解析如下:
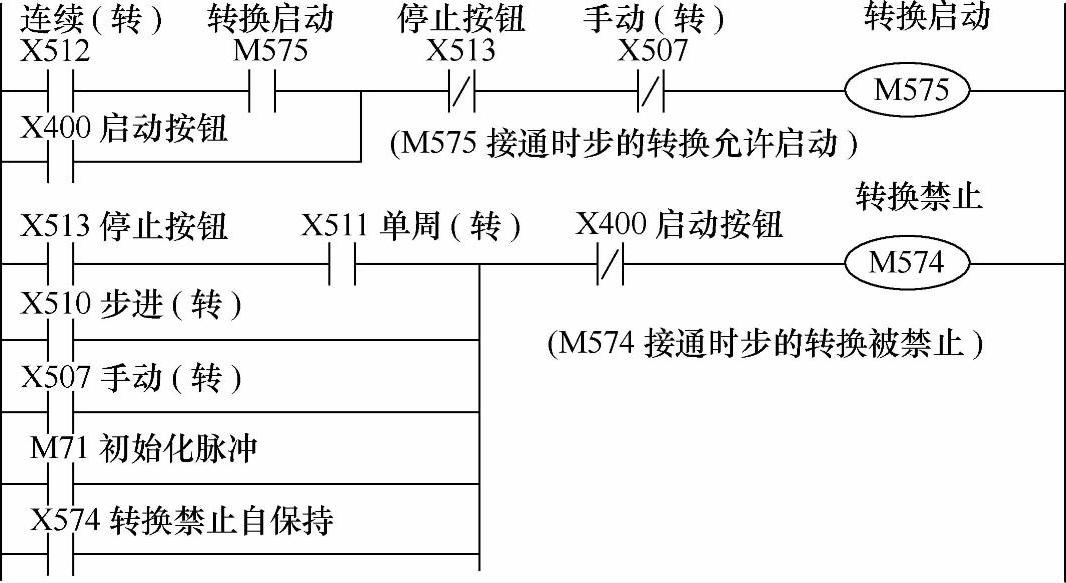
图5-29 表示步的状态器的转换启动和转换禁止的梯形图程序
1)在手动工作方式下,从转换启动的梯形图中可以看出,当转换开关在手动位时,X507手动(转)常闭触点此时是断开的,转换启动专用辅助继电器M575不可能接通。同时,在转换禁止梯形图中,X507手动(转)常开触点应是闭合的,从而接通了转换禁止内部辅助继电器M574。所以在手动方式下,禁止状态器转换。
2)在步进工作方式下,从转换禁止梯形图中可以看出,当转换开关在步进位时,X510步进(转)的常开触点应处于闭合状态,通过X510常开触点的接通和X400(启动按钮)的常闭触点而接通转换禁止继电器M574,并使M574自保持。此时状态器向下一步转换一般是禁止的。但当按下启动按钮X400时,X400常开触点闭合,可接通转换启动继电器M575(无自保持功能,见转换启动梯形图);与此同时,在按下启动按钮X400的同时,X400常闭触点断开,同时断开了转换禁止辅助继电器M574。所以,可以启动状态器转换系统,表示步的状态器可从当前步转换到下步(见转换禁止梯形图)。但在下步动作(或命令)完成后,此时虽然转换条件可能已经满足,但由于此时启动按钮已松开,X400启动按钮常闭触点又闭合,则通过X510步进(转)和X400常闭触点接通转换禁止继电器M574并且自保持,使表示步的状态器不能向下一步转换。此时,只有再按一次启动按钮重新接通M575断开M574一次,才可进展一步。重复上述过程,就形成了按一次启动按钮进展一步的步进工作方式。
3)在单周期工作方式下,此时在转换禁止梯形图中,当转换开关在单周期位时,X511单周期(转)的常开触点虽然闭合,但因为X513停止按钮的常开触点此时是断开的,所以,不能接通禁止转换继电器M574,解除了对表示步的状态器的转换禁止。此时,若按下启动按钮使X400常开触点闭合,则接通转换启动继电器M575(无自保持,启动按钮松开后M575线圈即断开),即可启动PLC状态器转换系统,实现表示步的状态器从当前步向下一步的转换。只要PLC状态器转换系统己被启动,除非M574禁止转换继电器被接通一次,否则,只要转换条件满足,从当前步向下一步的转换能一直进行下去(注意,因F1系列PLC状态器只有40个且在同一用STL编程方式所编的顺序控制程序中不能重复使用,所以,最多能转换40步),直到返回到初始步。由于初始步状态器向下一步(如S601)的转换是通过转换启动继电器M575常开触点闭合来实现的(见图5-29),在单周期工作方式中,按下启动按钮后,M575只是暂时接通,无自保持功能,当系统按功能表图工作一个周期返回初始步时,因M575是断开的,所以,系统停留在初始步,这样就形成了按一次启动按钮进展一周期的单周期工作方式。
在单周期运行期间(此时X511常开触点闭合),若按下停止按钮X513常开触点也闭合,则使禁止转换继电器M574接通并自锁,禁止状态器转换,系统完成当前步的动作(或命令)后停留在当前步,直到重新按下启动按钮X400,断开M574,接通M575(无自保持)时,才能完成该周期当前步之后的工作。
4)连续工作方式同单周期工作方式类似,不同点:一是在转换禁止梯形图中未设置M574接通电路,所以在连续工作方式下,完全解除了转换禁止;二是在转换启动梯形图中设置了M575继电器的转换启动后的自保持电路。在连续工作方式下,转换开关在连续工作位的X512连续(转)常开触点闭合,当按下启动按钮时,M575线圈接通,M575的常开触点也接通,使M575形成转换启动后的自保持状态。此时,当系统工作一个周期返回初始步S600时,因M575常开触点此时是闭合的,转换条件满足,则可从初始步S600向下一步(S601步)继续转换,开始下一周期工作。系统将这样一直工作下去直到按下停止按钮(X513常闭触点断开),断开M575线圈及其自保持电路,使之在完成当前周期工作后,不能进入下一个周期工作,而停留在初始步。
5.自动控制部分梯形图程序的编制
图5-30是根据图5-27,用步进梯形指令编程方式编制的龙门钻床PLC控制系统自动控制部分的梯形图程序,这也是单序列顺序控制的例子。
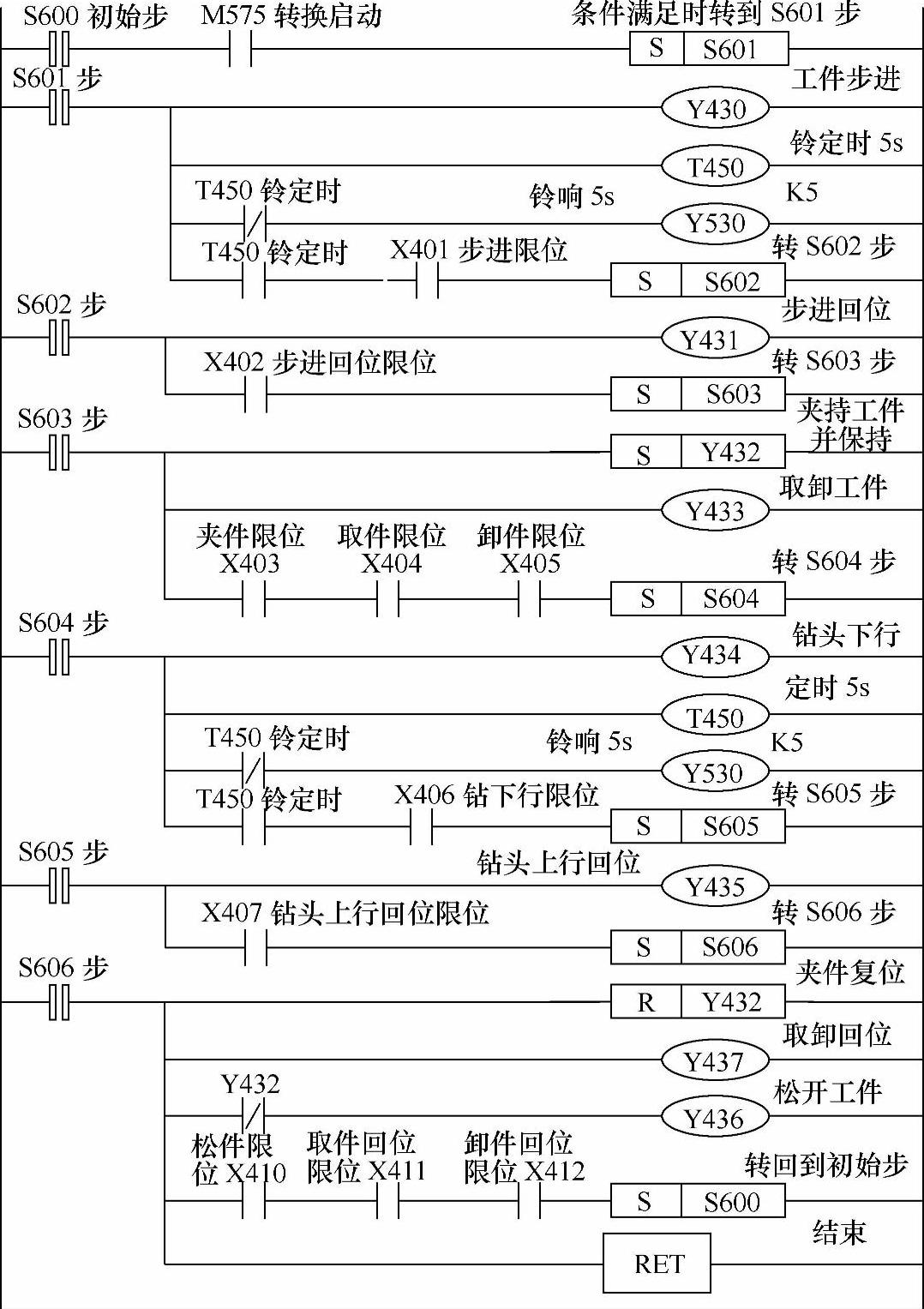
图5-30 钻床PLC控制系统自动控制部分的梯形图程序
当用F1系列PLC并用步进梯形指令编制自动控制梯形图程序时,要注意以下几点:
1)初始步状态器S600向下一步(本例中为S601)转换时,一般以M575的触点为转换条件。
2)步进梯形指令有使转换的原状态器自动复位断开的功能。例如,当步S602状态器接通为动步时,接通Y431。此时,当转换条件X402常开触点闭合时,可将S603状态器置位,即转换到下一步(S603步),使S603变为动步。而原状态器S602的复位是由PLC内部转换系统自动地将其变为静步,即断开S602,同时也就断开了Y431。
3)在系列STL电路结束时,要写入RET指令,使LD(或LDI)点回到原母线上。
4)在表示步的状态器禁止转换期间,当前步的状态器是处于保持接通状态。例如,当在步S604状态器处于动步而转换禁止继电器M574接通,使系统不能向下一步转换时,会使步S604处于始终保持接通状态;此时,即使转换条件满足,也不能向下步转换,该步的动作Y434也仍然保持接通输出。如果系统有特殊要求,不允许在禁止转换期间且转换条件又成立时动作仍被保持接通输出,则可在该步状态器和动作(或命令)输出继电器之间加入相反的转换条件来切断输出。本例中在步S604和Y434间加入转换条件X406的常闭触点即可。这样既可以在步S604接通时,不影响Y434输出,又可在转换条件X406接通时,用其常闭触点来切断Y434的输出(见图5-30)。
5)对于某步当中的命令(或动作)的输出需要保持的,可用置位指令使其保持输出。此时即使该步变为静步,用置位指令的输出也可使其保持,直至后面程序中用复位指令将其复位时为止。例如,步S603中的SY432(夹件并保持)的输出就是这样编程的。
6)用步进梯形指令编程允许同一继电器双线圈输出。例如步S601和步S604中的Y530就属于双线圈输出。
7)当进入执行由步进梯形指令编制的自动部分程序后,会一直执行自动部分程序,直到遇到RET返回指令后,才能执行其他部分程序。所以,自动程序末尾要用RET指令。当自动部分程序中间编有非步进梯形指令控制的程序时,非步进梯形指令控制程序前的自动程序末尾也要用RET指令,这样才能紧接着执行非步进梯形指令控制的程序。
6.手动部分梯形图程序
手动部分梯形图程序因其简单,所以,可以根据经验来设计。本案例龙门钻床手动操作部分的程序比较简单,只需设置一些必要的联锁即可,如图5-31所示。
7.以步进梯形指令编程方式为主编制的钻床PLC控制系统总梯形图程序
对于用步进梯形指令编程方式为主编制的PLC控制系统总梯形图程序,可将前面所介绍的通用程序(包括初始化、转换启动、转换禁止程序)、手动程序、自动程序按图5-26总体框图组合,即可得到图5-32所示的总梯形图程序。
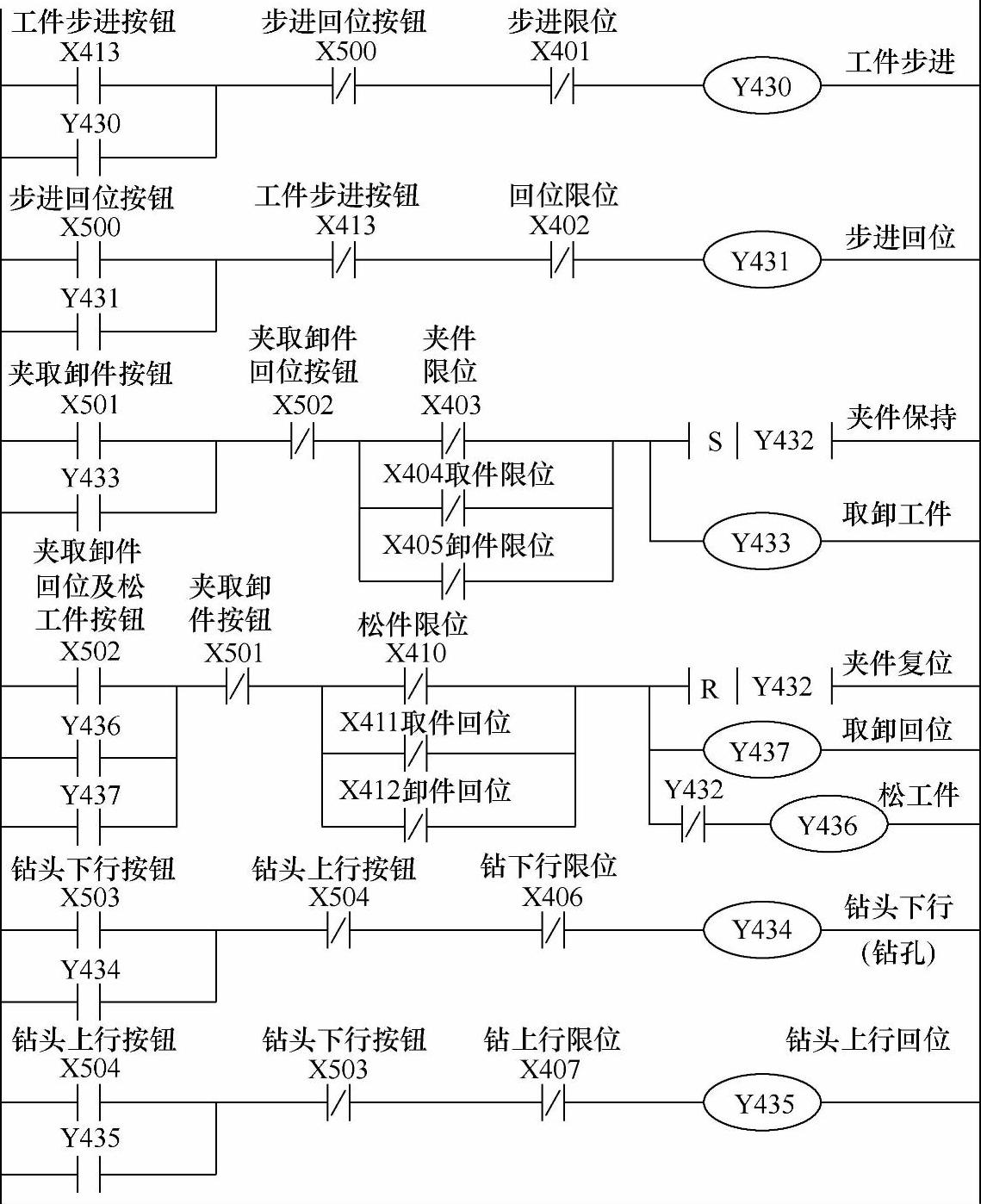
图5-31 钻床手动操作部分的程序
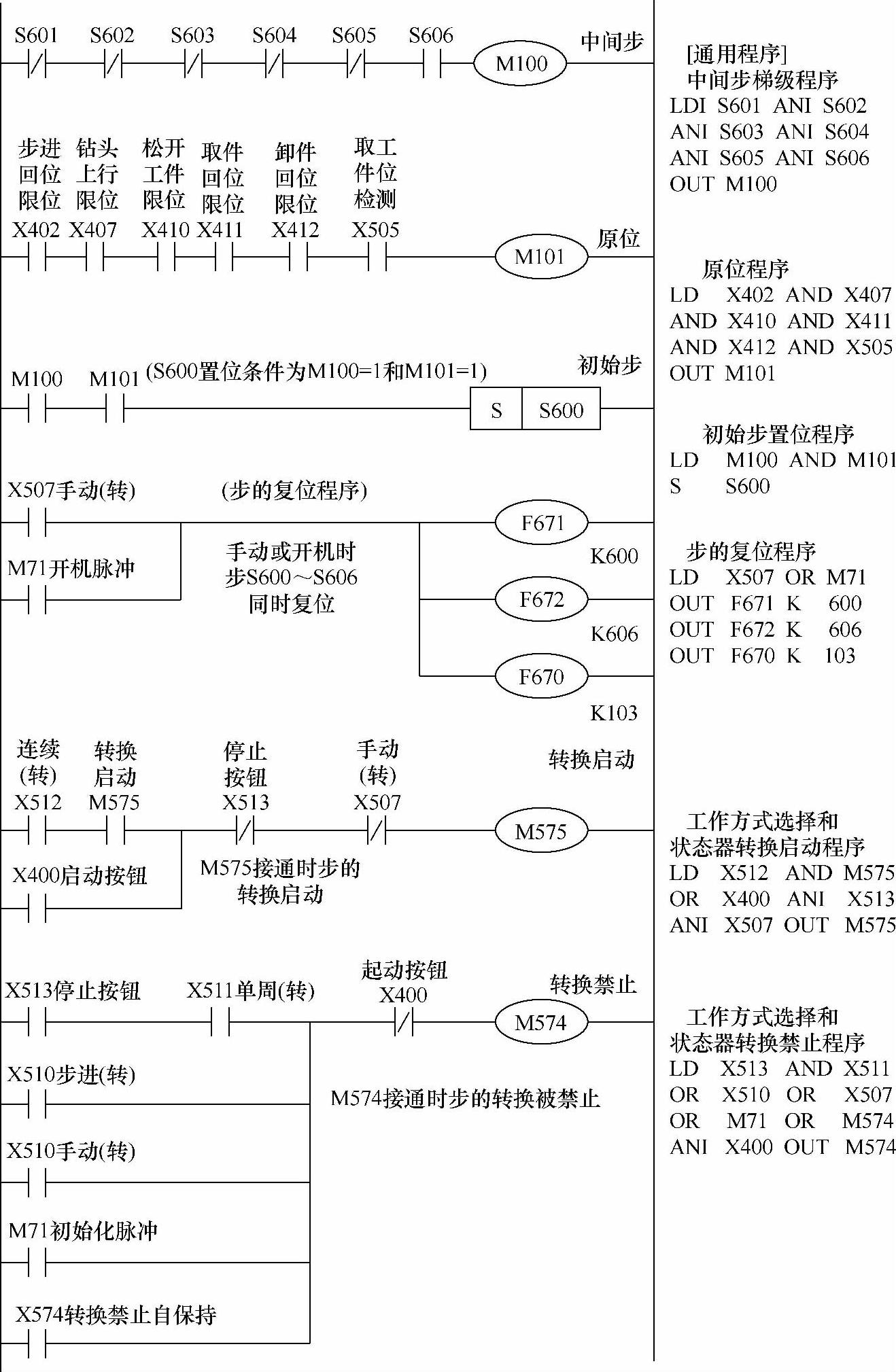
图5-32 钻床PLC控制系统总梯形图程序
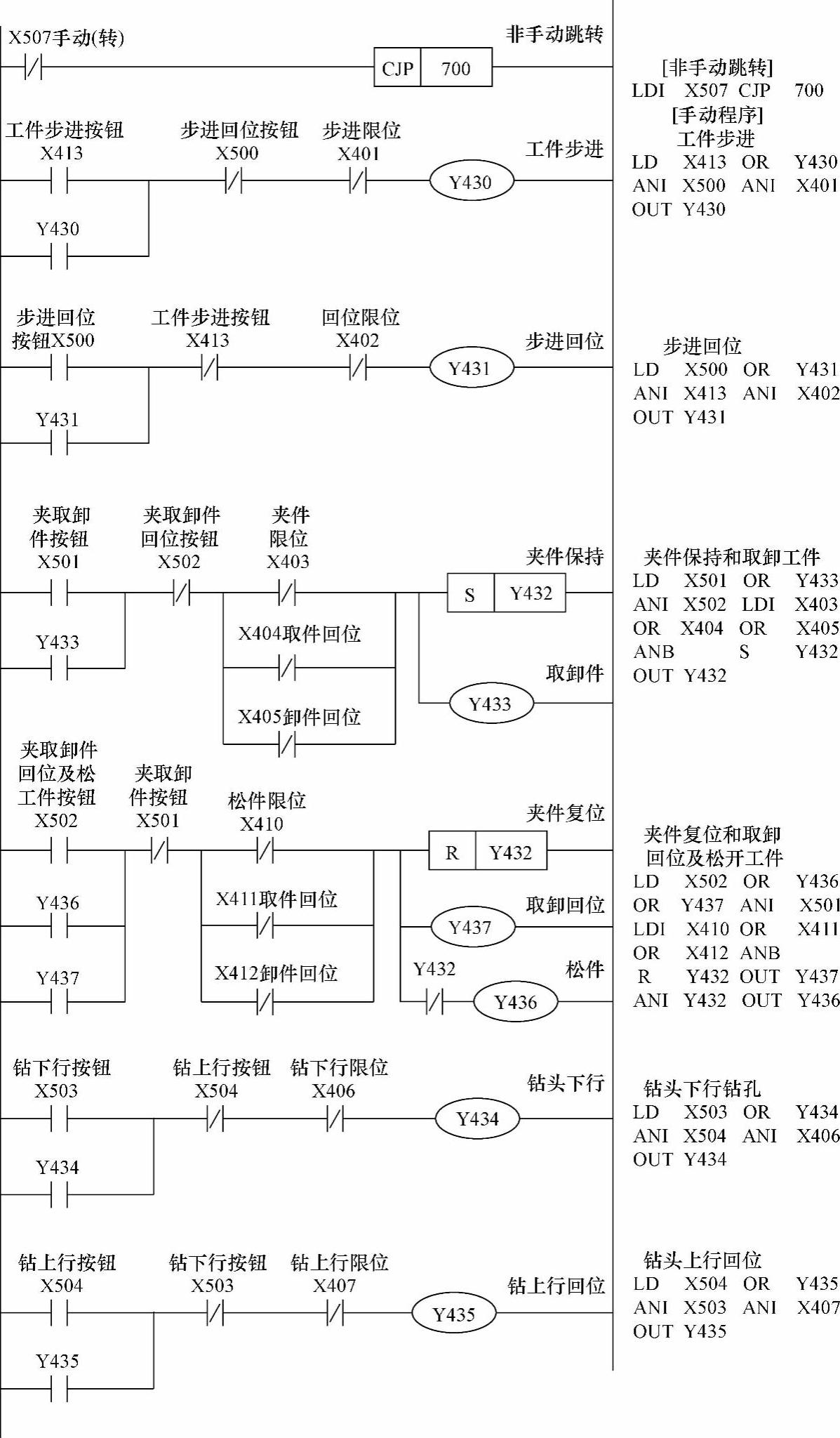
图5-32 钻床PLC控制系统总梯形图程序(续一)
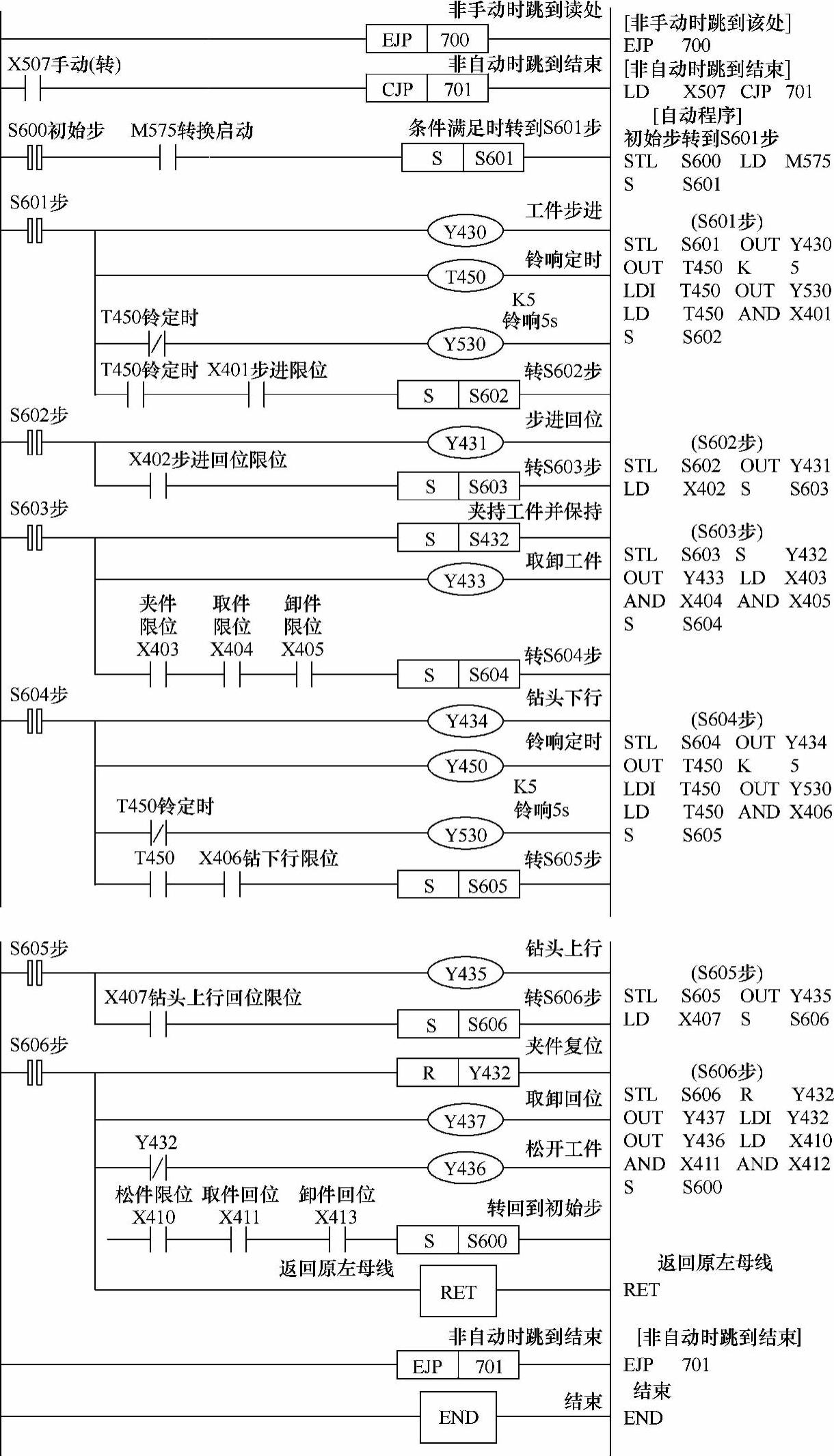
图5-32 钻床PLC控制系统总梯形图程序(续二)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。