



热继电器是利用流过继电器的电流所产生的热效应而反时限动作的继电器。所谓反时限动作,是指电器的延时动作时间随通过电路电流的增加而缩短。热继电器主要用于电动机的过载保护、断相保护、电流不平衡运行的保护及其他电气设备发热状态的控制。
热继电器的形式有多种,其中双金属片式应用最多。按极数划分,热继电器可分为单极、两极和三极三种,其中三极的又包括带断相保护装置的和不带断相保护装置的;按复位方式划分,热继电器有自动复位式(触头动作后能自动返回原来位置)和手动复位式。
1.结构
JR16系列热继电器的外形和结构如图3-14所示。它主要由热元件、动作机构、触头系统、电流整定装置、温度补偿元件和复位机构等部分组成。
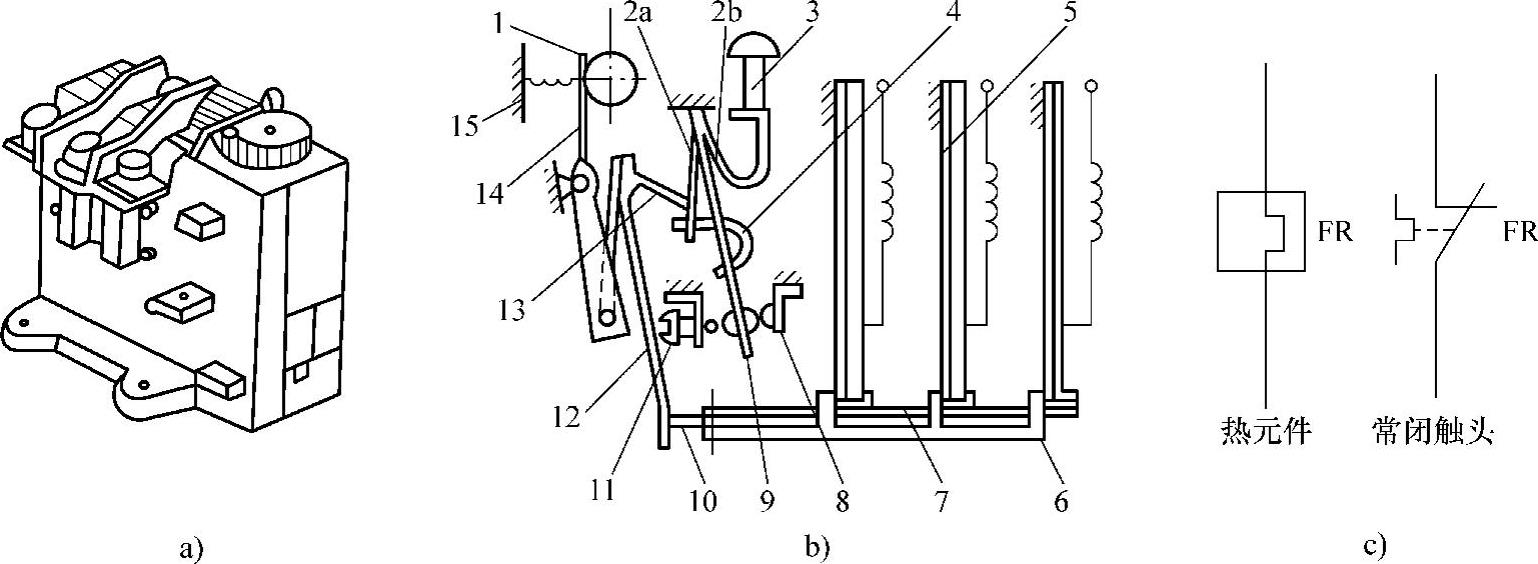
图3-14 JR16系列热继电器
a)外形 b)结构 c)符号
1—电流调节凸轮 2—片簧 3—手动复位按钮 4—弹簧 5—主双金属片 6—外导板 7—内导板 8—静触头 9—动触头 10—杠杆 11—复位调节螺钉 12—补偿双金属片 13—推杆 14—连杆 15—压簧
(1)热元件 热元件是热继电器的主要组成部分,由主双金属片和绕在外面的电阻丝组成。主双金属片是由两种热膨胀系数不同的金属片复合而成,金属片的材料多为铁镍铬合金和铁镍合金。电阻丝一般用康铜或镍铬合金等材料制成。
(2)动作机构和触头系统 动作机构利用杠杆传递及弹簧式瞬跳机构来保证触头动作的迅速、可靠。触头为单断点弹簧跳跃式动作,一般为一个常开触头、一个常闭触头。
(3)电流整定装置 通过旋钮和电流调节凸轮调节推杆间隙,改变推杆移动距离,从而调节整定电流值。(https://www.xing528.com)
(4)温度补偿元件 温度补偿元件也称为双金属片,其受热弯曲的方向与主双金属片一致,它能保证热继电器的动作特性在-20~+40℃的环境温度范围内基本上不受周围介质温度的影响。
(5)复位机构 复位机构有手动和自动两种形式,可根据使用要求通过复位调节螺钉来进行调整和选择。一般自动复位的时间不大于5min,手动复位时间不大于2min。
2.工作原理
使用时,将热继电器的三相热元件分别串接在电动机的三相主电路中,常闭触头串接在控制电路的接触器线圈回路中。当电动机过载时,流过电阻丝的电流超过热继电器的整定电流,电阻丝发热,主双金属片向右弯曲,推动导板6和7向右移动,通过温度补偿双金属片12推动推杆13绕轴转动,从而推动触头系统动作,动触头9与常闭静触头8分开,使接触器线圈断电,接触器触头断开,将电源切除起保护作用。电源切除后,主双金属片逐渐冷却恢复原位,于是动触头在失去作用力的情况下,靠弹簧4的弹性自动复位。
这种热继电器也可采用手动复位,以防止故障排除前,设备带故障再次投入运行。将复位调节螺钉11向外调节到一定位置,使动触头弹簧的转动超过一定角度失去反弹性,此时即使主双金属片冷却复原,动触头也不能自动复位,必须采用手动复位。按下复位按钮3,动触头弹簧恢复到具有弹性的角度,推动动触头与静触头恢复闭合。
3.选用原则
选择热继电器主要根据所保护电动机的额定电流来确定热继电器的规格和热元件的电流等级。
(1)根据电动机的额定电流选择热继电器的规格 一般情况下,应使热继电器的额定电流略大于电动机的额定电流。
(2)根据需要的整定电流值选择热元件的编号和电流等级 一般情况下,热元件的整定电流为电动机额定电流的0.95~1.05倍。但如果电动机拖动的是冲击性负载或起动时间较长及拖动的设备不允许停电的场合,热继电器的整定电流值可取电动机额定电流的1.1~1.5倍。如果电动机的过载能力较差,热继电器的整定电流可取电动机额定电流的0.6~0.8倍。同时,整定电流应留有一定的上、下限调整范围。
(3)根据电动机定子绕组的连接方式选择热继电器的结构形式 一般情况下,定子绕组作联结的电动机选用普通三相结构的热继电器,而作联结的电动机应选用三相结构带断相保护装置的热继电器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。