



图像处理系统的框图如图8-96所示。用于焊接生产的视觉跟踪系统一般情况下精度不高,但由于焊接过程本身的干扰大巨要求时间短,因此难度较大。
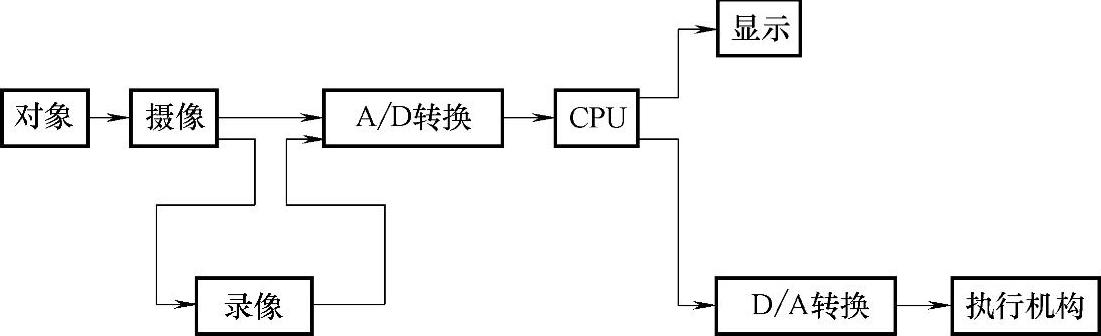
图8-96 图像处理系统
1.图像摄取
焊接时图像的摄取目前通用的是固态集成电路摄像机CCD。由于CCD摄像机体积小、质量轻(仅为180g)、寿命长、稳定性高、几何失真小,易于实际应用。
图像摄取时若选在红外光谱段内,对于抑制电弧干扰、清楚地观察焊接熔池是十分有利的。
摄像机摄取的近弧区图像可以直接由计算机处理,也可以记录在录像带上,然后由计算机进行离线处理。
2.图像的模数转换
图像的模数转换就是将灰度电平的各个元素由模拟量转换为计算机能够识别的数宇量。
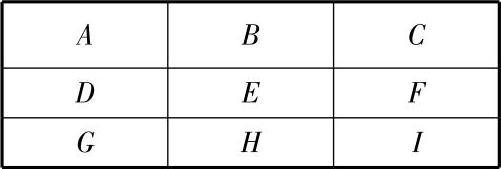
图8-97 图像的像素
3.计算机图像处理
把摄像机摄到的图像通过模数转换而数宇化后,用计算机对图像进行处理。
(1)图像平滑化 图像平滑化的处理方法一般采用邻域平均法。图8-97中A、B、C、D、E、F、G、H、I分别为该点的像素,这时常用的平滑化处理方法有以下几种。
①1/4(B+D+F+H)→E。
②1/5(B+D+F+H+E)→E。
③1/5(B+D+F+H+2E)→E。
④1/9(A+B+C+D+E+F+G+H+I)→E。
平滑化的处理应根据图像的具体情况,选用合适的平滑化方法。(https://www.xing528.com)
平滑化处理相当于图像的预处理。原始图像f(x,y)经平滑化处理后,得到新的图像函数g(x,y),用通式表示为
f(x,y)→g(x,y)=1/M∑f(m,n)
(m,n)S
其中S为平滑化区域。
(2)图像尖锐化(轮廓边缘处理)图像尖锐化的目的是突出边缘,这在X射线探伤焊缝缺陷时尤其有用。
图像尖锐化在数学上采用微分或差分处理的方法。如在图8-97中,图像尖锐化方法常用的有以下几种。
①|E-F|→E。
②|E-I|+|F-H|→E。
③|E-A|+|E+C|+|E-I|→E。
④{(E-I)2+(E-H)2}1/2→E。
(3)二值化处理 二值化处理就是设定一个灰度的阈值(门槛值)T2,使得处理后图像灰度矩阵的元素只有LG(高灰度)和LD(低灰底)两种,即:
g(x,y)=LG(高灰度)(f(x,y)≥T2)
LD(低灰度)(f(x,y)<T2)
二值化处理后的图像或者图黑底白或者图白底黑,这种方法在焊接中应用较多。
阈值T2过大,图像一片全黑;反之,T2过小,图像一片白色。T2的选择可以通过人工测试决定,也可以采用灰度分布统计图自动确定阈值。
4.结果输出
(1)测试结果输出 测试结果可输出到显示器、显示屏、打印机、绘图机或其他显示记录仪上。
(2)控制信息输出 用测试结果,通过接口或通道去控制执行机构。由执行机构的动作来改变控制对象的控制参数(如焊接电流、电弧电压、送丝速度等)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。