



1.运动控制数据流
为了实现机器人的示教动作再现,控制器内数据流程如下:
机器人当前位置、机器人目标点位置→插补增量→插补点位置→各轴转角增量→新的当前位置。
1)机器人当前位置数据由位置检测单元生成;目标点位置数据由示教时生成。
2)插补增量由再现时运算生成。
3)插补点数据由再现时运算生成。
4)各轴转角增量由再现时运算生成。
5)新当前位置由运动停止时生成。
2.机器人运动原理
(1)机器人运动方式 机器人的运动分为操作运动和程序运动。操作运动指用轴操作键使机器人动作。程序运动是机器人按照程序的位置点进行运动。
轴操作键的动作有机器人各个关节单独动作、直角坐标方向的移动及绕坐标轴的转动。
机器人在程序运动时,以程序中记录的位置点为目标,逐点到达各个目标点,连接成整个作业运动,实现作业动作。在程序动作中,机器人从一点运动到另一点,分PTP控制与CP控制。
(2)PTP控制与CP控制 机器人从一点移动到另一点,只关心目标点位置,不在意经由的路径,称作PTP控制,如不考虑路途干涉的点焊作业可视作这种控制。
机器人运动时,除了要到达目标点外,有时还要求经由路径为圆弧或直线等运行方式,这称作CP控制。弧焊时的焊缝是典型的CP控制。
(3)PTP控制与CP控制的插补方法PTP控制是先算出在一条命令中每个轴以指定的速度到达目标点所需的时间,然后以花费时间最长的轴为基准,确定本条命令的实际执行时间,其他轴以此时间为准,调整各自的速度,每轴都以匀速进行动作,所有的轴同步到达目标点。为此运动控制时各轴有自己的速度,因而运动轨迹没有保证。
CP控制的插补方法是将路径的各点用直线或者圆弧连接起来,各点连接线再现时,通过直线或圆弧插补运算生成连续间的插补点,这些插补点组成机器人的运动轨迹。机器人逐点通过这些插补点,实现轨迹的插补控制。
直线插补由起点与终点进行计算,圆弧插补则至少要三个示教点来进行计算,得到插补点。任何复杂曲线的工件,都可由连续使用圆弧插补形成自由的曲线来实现。
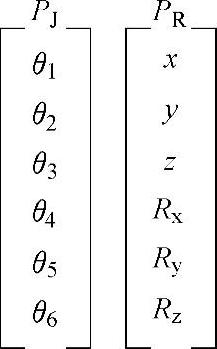
(4)坐标变换与伺服指令 多关节机器人的示教位置数据一般用各关节的关节角来定义。6轴垂直多关节机器人有6个轴的关节数据,以这些关节为基准的坐标系叫做关节坐标系(连杆坐标系)。进行直线插补、圆弧插补等的插补运算以及进行手腕姿态控制时,首先要将这个关节坐标变换成机器人的固有直角坐标系,并在此基础上进行插补计算。关节坐标与直角坐标的关系如图8-54所示。
控制点的坐标以各个坐标系的方法表示如图8-55所示。
机器人从示教点P1到示教点P2进行插补的运算方法介绍如下,如图8-56所示。
1)将P1点及P2点从关节坐标系变为直角坐标系。
2)用直角坐标系算出移动距离及移动时间。
3)根据单位时间ΔT求出位置增量(Δx、Δy、Δz),再由此算出下面的目标值Q1,Q2,……(即每隔ΔT后的各目标值)。
4)将目标值与当前值变换成关节坐标。求出关节角度的增量,再算出针对伺服控制的脉冲位置增量。
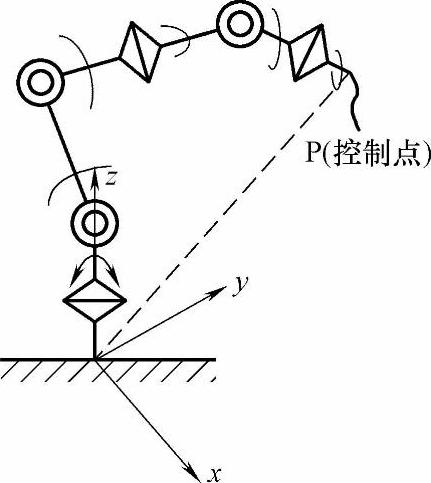
图8-54 关节坐标与直角坐标的关系
 (https://www.xing528.com)
(https://www.xing528.com)
图8-55 坐标数据(实际的表示是矢量表示)
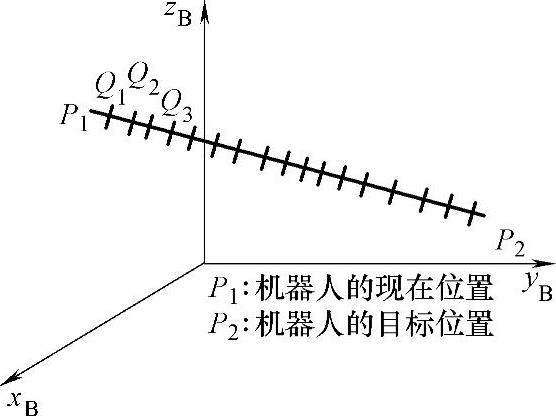
图8-56 插补运算示意图
5)将脉冲位置增量向各轴的伺服控制器发命令。
6)为到达目标位置P2,重复进行4)~5)的操作。
在机器人的控制器中,上述轨迹生成可以用框图表示,如图8-57所示。
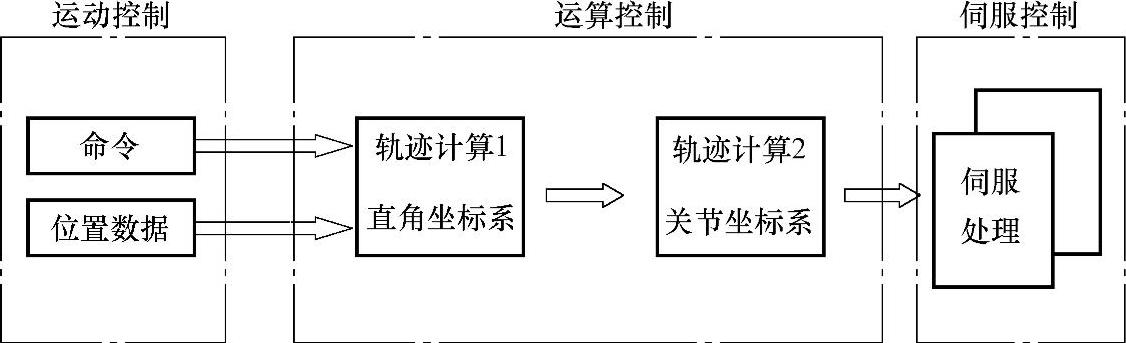
图8-57 轨迹生成运算
机器人在两插补点之间的运动,实际上是各关节的自由运动。为了使插补动作能够较好地实现要求的动作轨迹,需要插补点距离足够小,否则机器人的运动轨迹将不平滑。但另一方面,由于插补时需要不断进行机器人运动学计算,需要大量的运算时间,所以不能无限度地缩小插补点距离。综合各方面的因素,现在的机器人插补周期一般定位在10mm左右。
3.伺服控制驱动
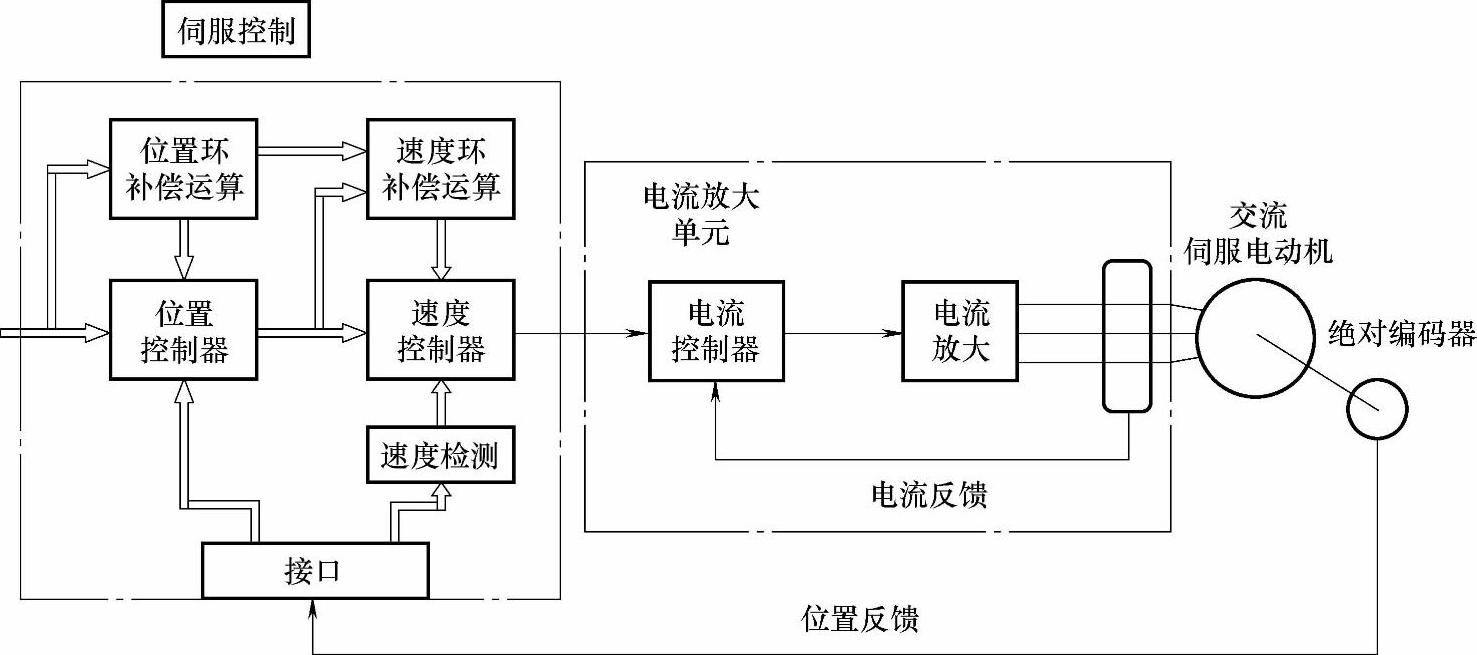
图8-58 机器人伺服控制框图
(1)伺服控制 在运动控制中得到的命令,发送到伺服单元,对各轴进行伺服控制。机器人伺服控制单元实行反馈控制,控制器的反馈控制框图如图8-58所示,控制回路中有位置环、速度环与电流环。位置环与速度环都由数值运算实现。
在反馈控制回路中,同时还要进行各种调节控制与补偿。这可以提高响应速度,并获得超调量,巨使系统运行稳定,处于最佳的工作状态。
(2)伺服驱动放大 机器人的伺服放大驱动单元采用电流转换、逆变放大方式,并在逆变中进行矢量转换控制,使电动机的运行处于很好的受控状态。电流放大采用脉宽调制技术,伺服驱动放大电路原理图如图8-59所示。
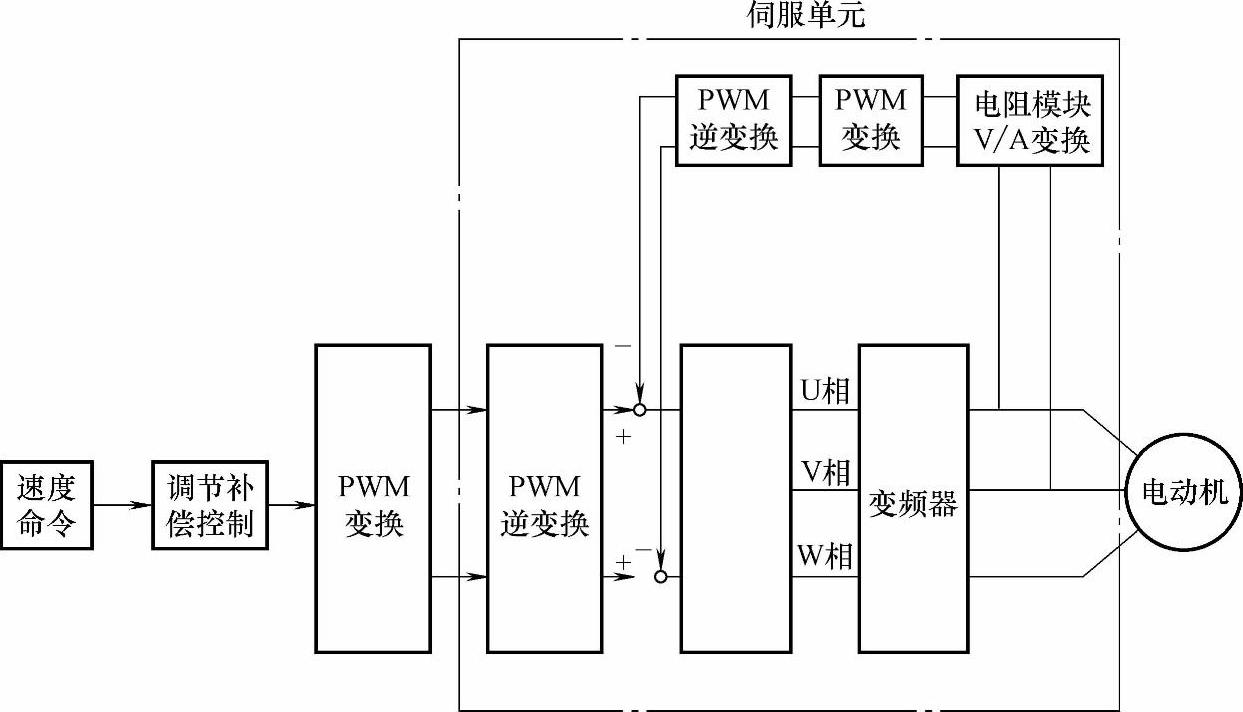
图8-59 伺服驱动放大电路原理
(3)绝对位置编码器 在伺服控制系统中,位置检测是一个重要的环节,机器人在运行时几乎随时都在进行位置检测。进行位置检测的器件,目前多用绝对位置编码器,与以往不同的是绝对位置编码器也包含了增量编码器的功能。
当机器人开机时,该编码器提供机器人的当前绝对位置信息,用于机器人开机的位置初始值检测。当机器人运行时,该编码器提供运动信息,即机器人位置的实时增量,用于伺服控制的位置反馈。同时该位置增量信息经微分处理后,可以得到速度信息,用于速度反馈。
为了提高可靠性,编码器的信号采用串行通行方式。
4.机器人的命令体系
机器人提供了一套完备的命令体系,可供使用者选用。这些命令被分成不同的命令组,除了最基本的PTP、CP的运动命令外,还有控制命令、运算命令、作业命令、输入输出等各类命令,还有针对不同选项功能的专用命令。根据要求可以对这些命令进行灵活的使用。但为了提高效率,命令的种类及数量都不能太多。
命令中带有各种标识符,这些标识符分为基本标识符与可选标识符。此外命令中还包括一些必要的数宇,如速度值等。
(1)运动命令 这是机器人命令中最基本的命令。其中主要有关节运动、直线插补、圆弧插补与抛物线插补等。命令中的标识符有速度、到位级别等。运动命令分为目标位置型与增量位置型。由示教产生的运动命令可以是以示教时机器人所在的位置点为命令执行时的运动目标值,位置数据被隐含于程序之中;也可以由位置变量来表示动作的目标位置。增量型的运动命令都是用位置变量来表示运动坐标增量的。
运动命令的速度分为比例型与线速度型。关节运动的速度值为最大速度的百分比,而直线插补与圆弧插补的速度为线速度。
(2)非运动命令 非运动命令包括控制命令、输入输出命令、作业命令、运算命令等。控制命令用于程序的各种控制功能,常见的控制命令主要有程序调用命令、程序跳转命令、延时、暂停等。调用与跳转可以根据各种条件判断进行。输入输出命令可以对周边设备进行控制与检测。作业命令是对与用途有关的工具或设备的命令。弧焊机器人的作业命令有起弧、熄弧、焊接电流电压的设定等,点焊机器人有点焊、空打点、行程转换、焊接条件等。而运算命令有助于比较复杂的工作任务的完成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。