



1.焊接机器人的基本工作方法
机器人的工作,通常是通过“示教”的方法为机器人作业程序生成运动命令,也就是由操作者通过示教盒,操作机器人使其动作,当认为动作合乎实际作业中要求的位置与姿态时,将这些位置点记录下来,生成动作命令,并在程序中的适当位置加入相应于工艺参数的作业命令及其他输入输出命令。当程序运行时,机器人按要求进行动作,并进行作业的工作。在实际工作中,通常需要将示教的程序进行试运行,并进行修改、调整,才能得到有效的工作程序。到目前为止,普遍使用的工业机器人,都是以这种“示教再现”的方式工作。
2.焊接机器人的工作原理
机器人操作机是机器人的工作执行部分,一般来说,作为工业机器人,操作机都需要与作业装置相结合,才能有效地进行工作。焊接机器人是工业机器人的一种应用形式,也需要与焊接装置结合,完成焊接作业。
对于焊接作业来说,要求焊接工具末端可以在三维空间内以任意姿态接近工作点,因此焊接机器人操作机基本上采用6自由度垂直多关节结构,如图8-49所示。前面的3个轴(S、L、U)用于决定机器人的位置,后面3个轴用于决定机器人的姿态。在控制时,机器人的6个坐标分量分别定义为X、Y、Z三个位置坐标分量和RX、RY、RZ三个姿态坐标、分量,如图8-50所示。6轴的机器人,可以通过坐标变换,与6个坐标分量建立联系,使机器人的空间位置得以确定。
控制器主要用于机器人的坐标变换运算、位置及速度的伺服控制及输入输出控制。控制器主要由主控、伺服控制、I/O单元等部分构成。主控用于机器人系统的管理与各种运算,伺服控制用于各轴的伺服驱动控制,I/O单元用于输入输出控制。图8-51所示为控制器外观图。
示教盒用于操作机器人及人机信息交换,主要内容包括程序的生成、机器人的手动操作、各种状态信息的显示、命令菜单的显示、报警信息显示等。图8-52所示为示教盒外观。
3.焊接机器人操作步骤
焊接机器人的主要控制流程是通过操作者对作业任务的了解,向机器人输入相应信息,由机器人通过运算、驱动控制来实现作业工作。控制流程如图8-53所示。
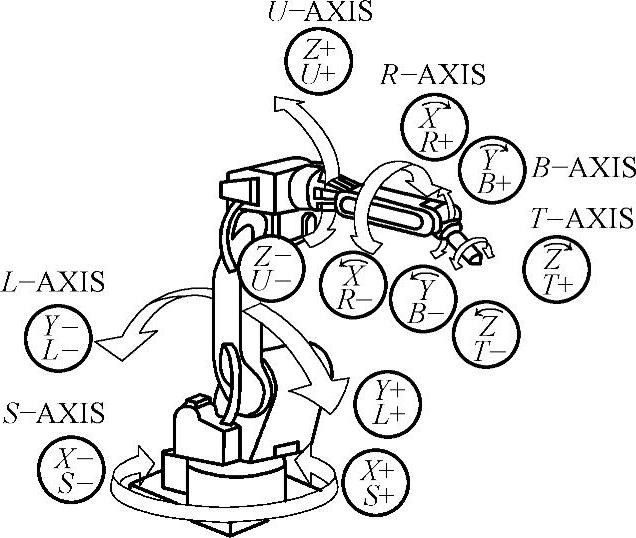
图8-49 机器人关节轴
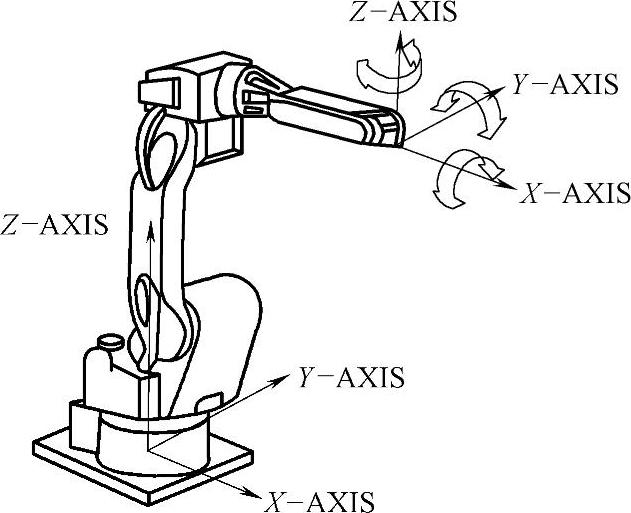
图8-50 机器人坐标轴
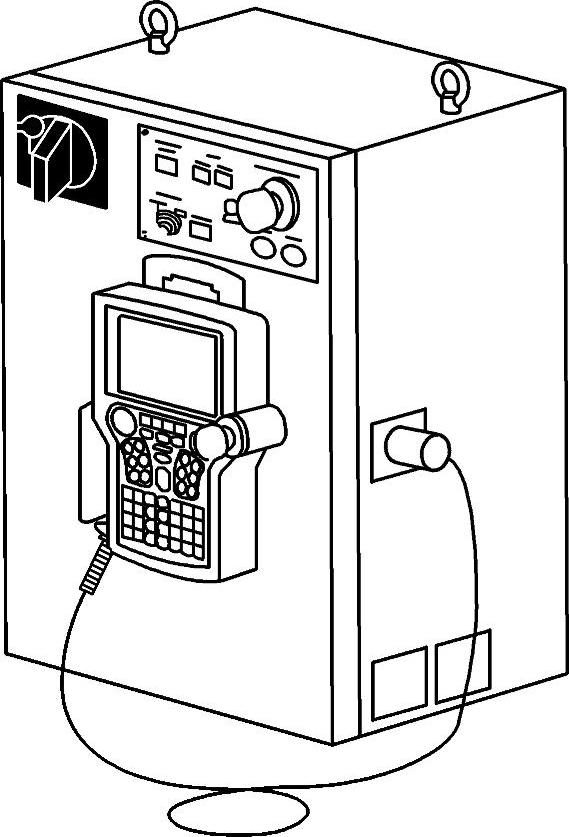
图8-51 控制器外观图(https://www.xing528.com)
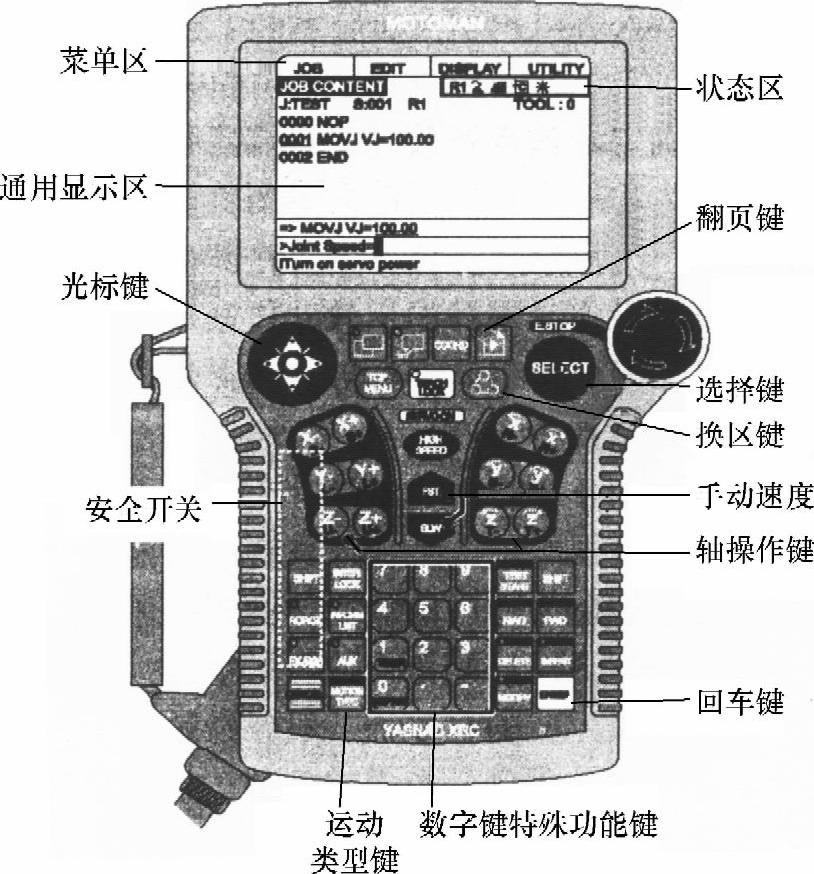
图8-52 示教盒外观
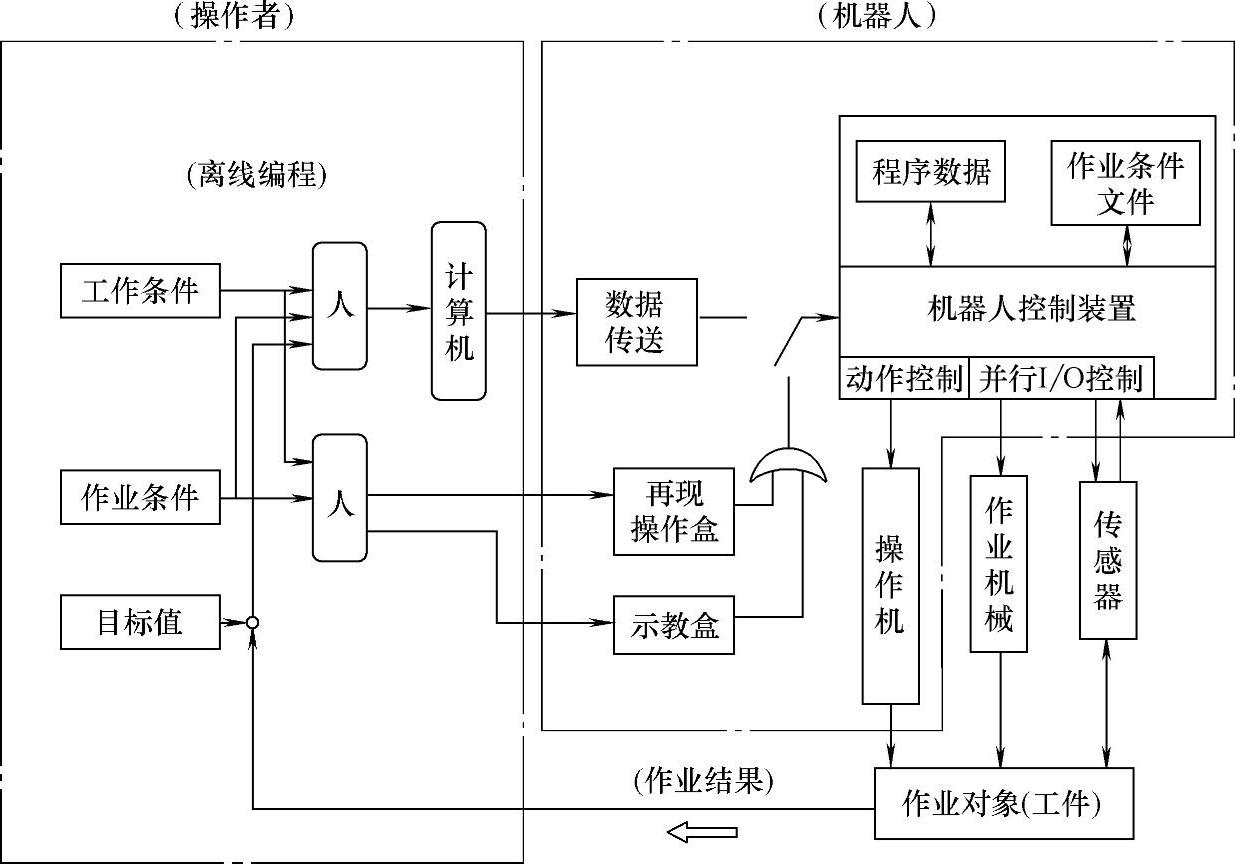
图8-53 焊接机器人控制流程
(1)程序的生成 程序均通过示教生成。示教时将首先生成一个新程序框架。
机器人通过示教盒进行示教。示教时,机器人在示教盒轴操作键的控制下,按指定的坐标或关节进行动作,机器人在操作者的操作下,向需要的目标点移动。当确定示教点有效时,控制器生成运动命令,同时记录当前的各轴位置数据,作为程序中相应运动命令的关联位置数据。此时,只需将各轴关节位置记录下来,就可以计算出机器人在其他坐标系下的相应坐标值。
可供操作者选择的示教动作操作坐标有关节坐标、机器人直角坐标、用户设定直角坐标、工具坐标等。当操作坐标选定后,机器人以相应的动作方式接近示教目标点。
程序由各种命令组成,除了最基本的动作命令,还有输入输出命令、控制命令、运算命令、作业命令、特殊功能命令等。在这些命令中还有不同的标志项,如控制命令中的调用作业程序命令,就可以分为各种有条件调用和无条件调用等。通过这些命令的不同组合,可以实现各种程序的控制。
经示教生成的程序,一般要经过试运行,对程序进行检查和调试。特别是对于弧焊焊接程序,其中的各种工艺参数与动作方式,往往要经过多次、反复的调试,才能取得良好的效果。
对于一些有规律性动作的焊接作业,也可以通过离线编程的方式来生成程序。离线编程需要机器人有准确的安装位置标定,以免产生误差。
(2)程序的运行 机器人运行经示教生成的程序,称为程序的再现。
在再现的时候,可以选择单步、单循环、连续自动等循环模式。程序的启动可以通过几种形式进行。
机器人有单品种生产、连续生产、多品种轮换生产、不同品种随机生产等生产方式,因此有各种程序的启动方式。如单品种可以用程序循环或重复启动程序,多品种轮换可以由程序顺序调用或指定启动,不同品种可以通过指定程序启动或者自动工件识别等方式。而对于指定程序又可分为指定条件调用与直接指定启动。各种启动方式的选择主要依据是否能够更好地实现作业的顺利进行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。