



在生产中,焊机变位机常与焊件变位机配合使用,可以完成多种焊缝,如纵缝、环缝、对接焊缝、角焊缝及任意曲线焊缝的自动焊接工作,也可以进行工件表面的自动堆焊和切割工艺。
1.焊接操作机
(1)伸缩臂式操作机 伸缩臂式操作机是在悬臂操作机的基础上发展起来的,其结构也基本相仿,如图3-79所示。此类伸缩臂式操作机的工作特点如下:
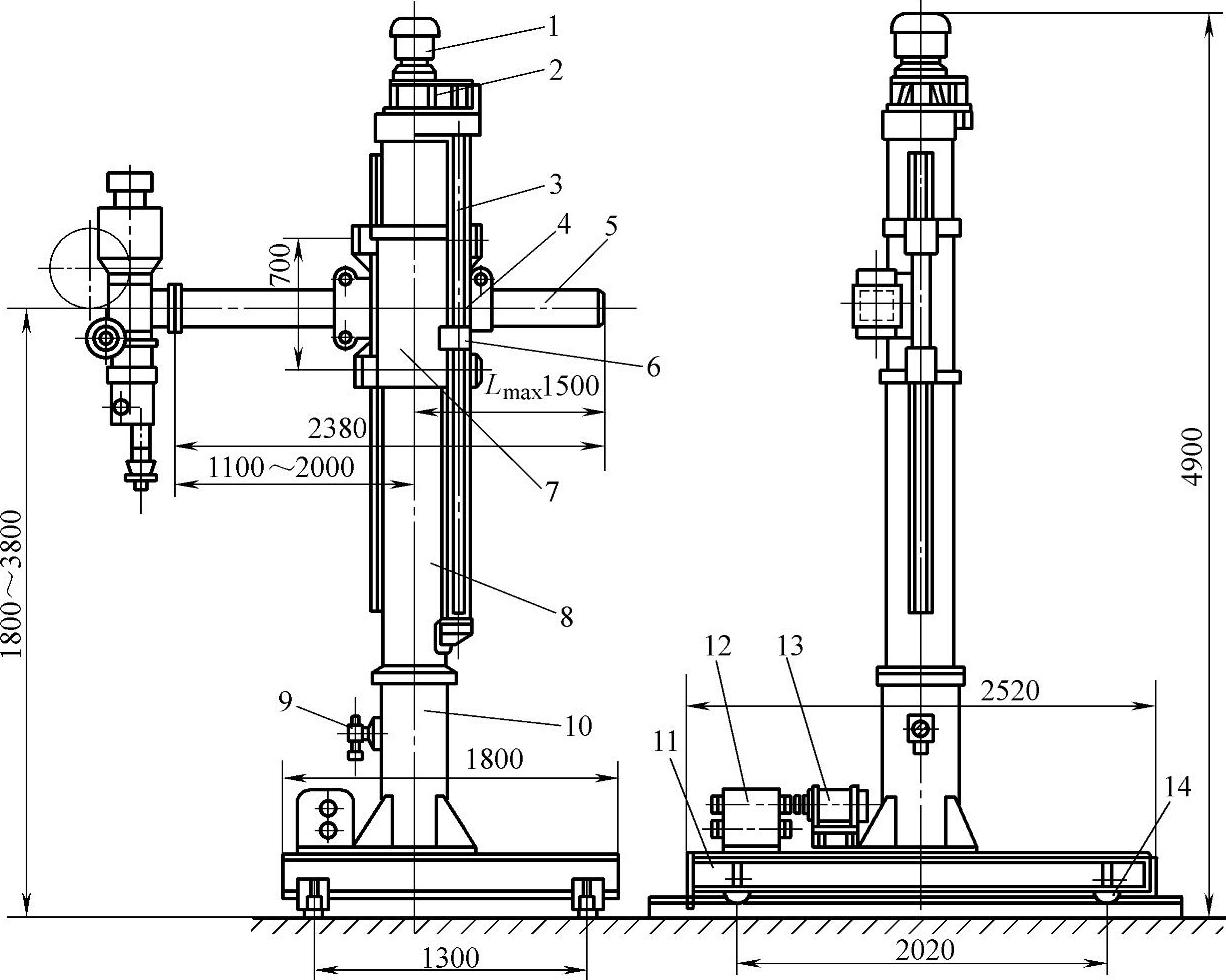
图3-79 伸缩臂式焊接操作机
1—升降用电动机 2、12—减速器 3—丝杠 4—导向装置 5—伸缩臂 6—螺母 7—滑座 8—立柱 9—定位器 10—柱套 11—台车 13—行走电动机 14—走轮
1)该操作机具有台车行走、立柱回转、伸缩臂伸缩与升降四个运动。作业范围大,机动性强。
2)操作机的伸缩臂5能以焊速运行,所以与变位机、滚轮架配合,可以完成筒体、封头内外表面的堆焊以及螺纹形焊缝的焊接。
3)在伸缩的一端除安装焊接机头外,还可安装割炬、磨头、探头等工作机头,可完成切割、打磨和探伤等作业,扩大该机的适用范围。
4)该机可以完成各种工位上内外环缝和内外纵缝的焊接任务。
5)操作机的各种运动应平稳,无卡楔现象,运动速度应均匀。
图3-80是一种组合式伸缩臂操作机,由几根有导轨的横臂和立柱组合而成。操作机横臂的升降和伸缩行程均可为1.5m,横臂上除配备专用的焊接机头外,还配置有各种夹具、工件、支承器等装置。此种操作机使用方便,生产效率较高,特别适用于中小型结构件的焊接。
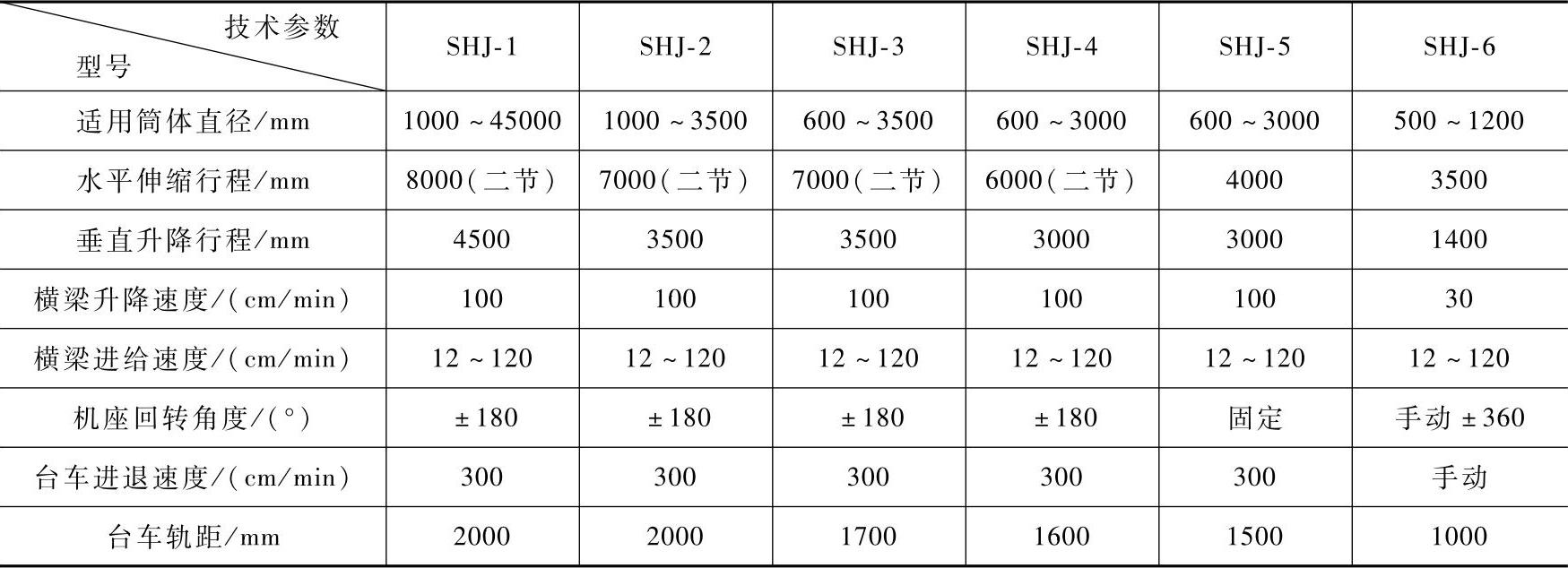
SHJ型伸缩臂式焊接操作机的主要技术参数见表3-15。
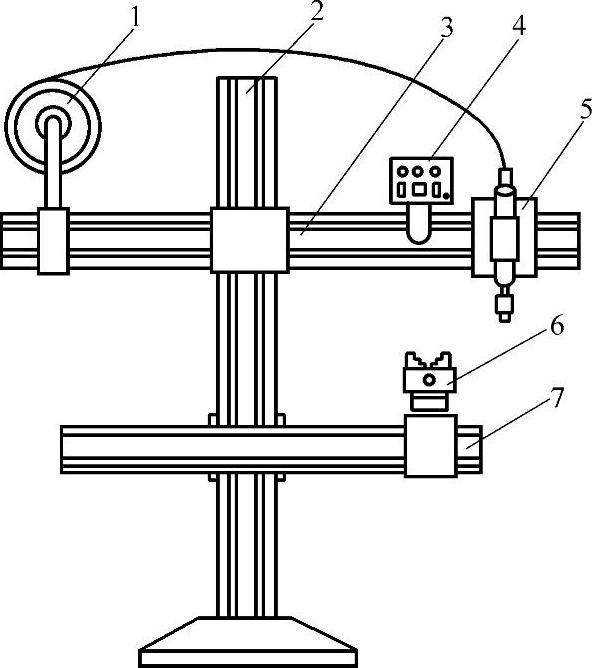
图3-80 组合式伸缩臂焊接操作机
1—焊丝盘 2—立柱 3—横臂 4—控制板 5—焊接机头 6—焊接夹具 7—支承工件横臂
表3-15 SHJ型伸缩臂式焊接操作机的技术参数
(2)平台式操作机 平台式操作机的基本结构形式是将焊接机头1放置在平台2上,可在平台的专用轨道上做水平移动。如图3-81所示,平台安装在立架3上巨可沿立架升降。立架坐落在台车4上,台车沿地轨运行。平台式操作机有单轨式和双轨式两种类型,为防止倾覆,单轨式须在车间的墙上或柱上设置另一轨道(见图3-81a);双轨式放在台车上或支架上放置配重5平衡(见图3-81b),以增加操作机工作的稳定性。
平台式操作机主要用于筒形容器的外纵缝和外环缝的焊接。焊接外纵缝时,容器横放在平台下固定不动,焊机在平台上沿专用轨道以焊接速度移动完成焊接。当焊接外环缝时,焊机固定,容器放置在滚轮架上回转完成焊接。台车的移动可以调整平台与容器之间的位置,使容器吊装方便。一般平台上还设置起重电葫芦,以吊装焊丝、焊剂等重物,从而保证生产的连续性。
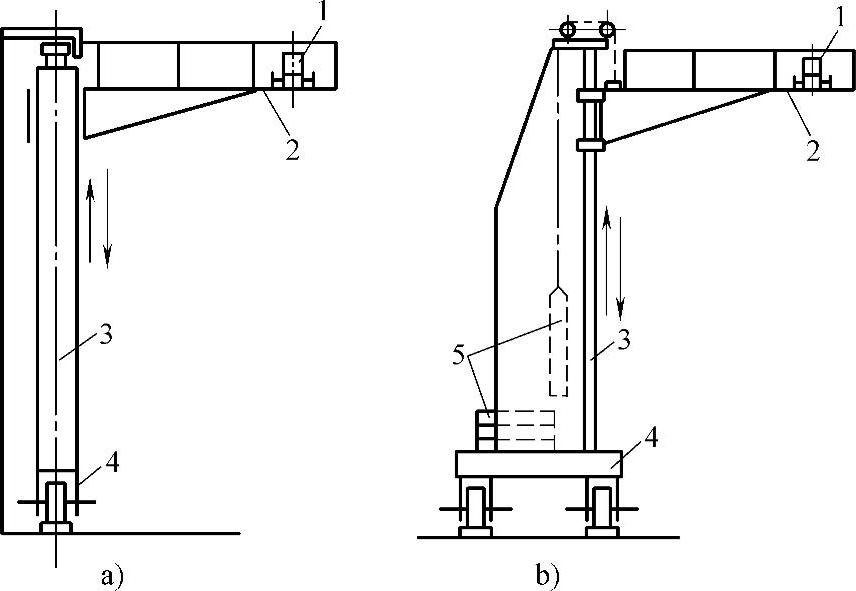
图3-81 平台式操作机示意图
a)单轨式 b)双轨式
1—焊接机头 2—平台 3—立架(柱) 4—台车 5—配重
 (https://www.xing528.com)
(https://www.xing528.com)
图3-82 悬臂式焊接操作机(一)
1—焊接机头 2—悬臂 3—立柱 4—台车 5—地轨
(3)悬臂式操作机 如图3-82所示,此种操作机的焊接机头1安装在悬臂2的一端并可沿悬臂移动,悬臂安装在立柱3上,可绕立柱回转和沿立柱升降。焊机可随悬臂用台车4沿地轨5做纵向运动。当它与焊件翻转装置(如焊接滚轮架)配合使用时,可以焊接不同直径容器的纵、环焊缝。应当指出的是,生产中采用立柱及台车沿地轨运动作为焊接速度是不恰当的,因地轨的纵向运动仅用作调整悬臂与容器之间的相对位置。
图3-83是另一种形式的悬臂操作机,主要用来焊接容器的内纵和内环缝。悬臂3上面安装有专用轨道。当焊接内纵缝时,可把悬臂放在容器的内壁上,焊机在轨道上移动;当焊接内环缝时,焊机在悬臂上固定,容器依靠滚轮架回转而完成工作。悬臂通过升降机构2与行走台车1相连,悬臂的升降是由手轮通过蜗杆机构和螺纹传动机构来实现的。为便于调整悬臂高低和减少升降机构所受的弯曲力矩,安装了平衡锤用以平衡悬臂;行走台车上装有电动机,经减速机构驱动台车后轮,用来调整悬臂与容器之间的位置。
(4)折臂式操作机 这种操作机的结构特点如图3-84所示,它是横臂2与立柱4通过两节折臂3相连接的,整个折臂可沿立柱升降,因而能方便地将安装在横臂前端的焊接机头移动到所需要的焊接位置上。采用折臂结构还能在完成焊接后及时将横臂从工件位置移开,便于吊运工件。折臂式操作机的不足之处是:由于两节折臂的连接、折臂与横臂的连接以及折臂与立柱的连接均采用铰接的方式,因此导致横臂在工作时不太平稳。
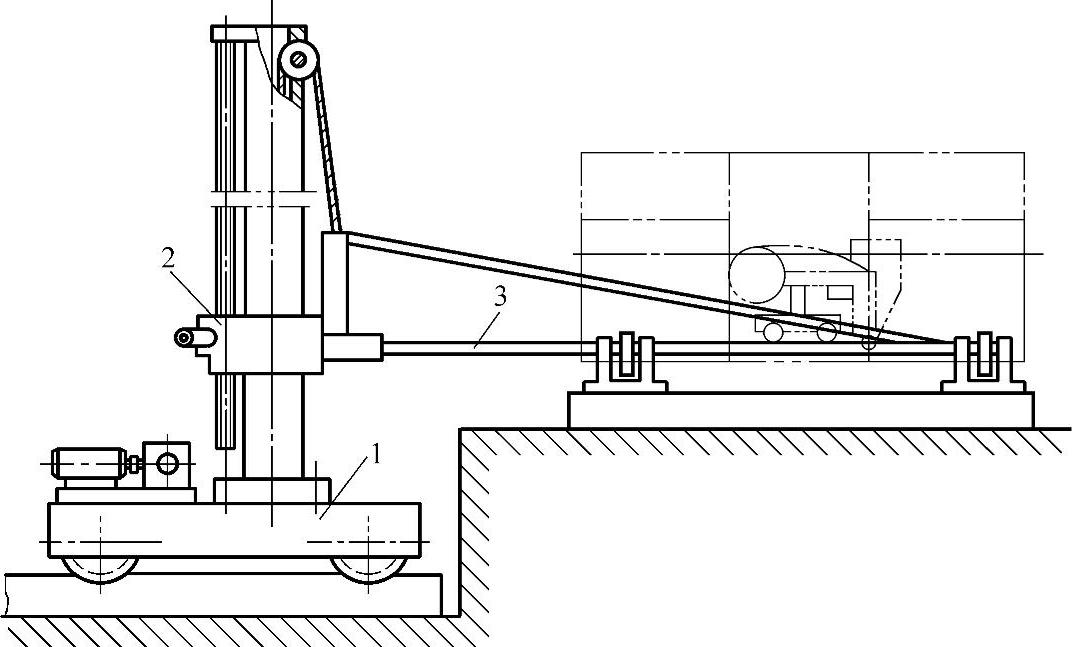
图3-83 悬臂式焊接操作机(二)
1—行走台车 2—升降机构 3—悬臂
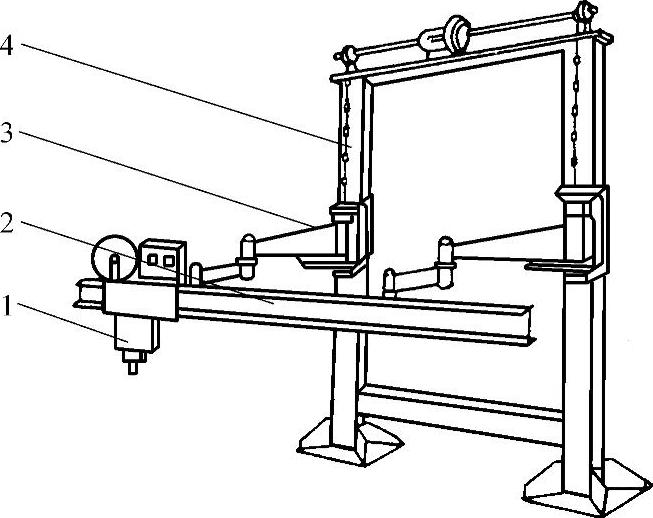
图3-84 折臂式操作机
1—焊机 2—横臂 3—折臂 4—立柱
(5)门桥式操作机 门桥式操作机是将焊机或焊接机头安装在门桥的横梁上,工件置于横梁下面,门桥跨越整个工件,通过门桥的移动或固定在某一位置后以横梁的上下移动及焊机在横梁上运动来完成高大工件的焊接。图3-85是一种焊接容器用门桥式操作机,与焊接滚轮架配合可以完成容器纵缝和环缝的焊接。门桥的两立柱2可沿地轨行走,由电动机5驱动。通过传动轴带动两侧的驱动轮运行,以保证左右轮的同步。横梁3由电动机4带动两根螺杆传动进行升降。焊接机头6可沿横梁上的轨道长度方向行走。
当门桥式操作机仅完成钢板的拼接或平面形的焊接任务时,横梁的高度一般是不可调的,而是依靠焊接机头的调节对准焊缝。门桥式操作机的外形尺寸大,占用车间面积多,因此使用不够广泛,主要适用于批量生产的专业车间。
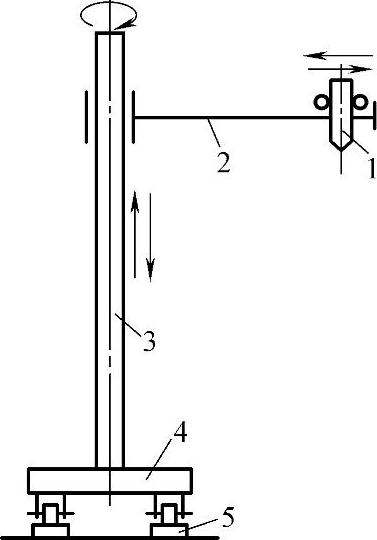
2.电渣焊立架
电渣焊立架是将电渣焊机连同焊工一起按焊速提升的装置(见图3-86)。它主要用于立缝的电渣焊,若与焊接滚轮架配合,也可用于环缝的电渣焊。
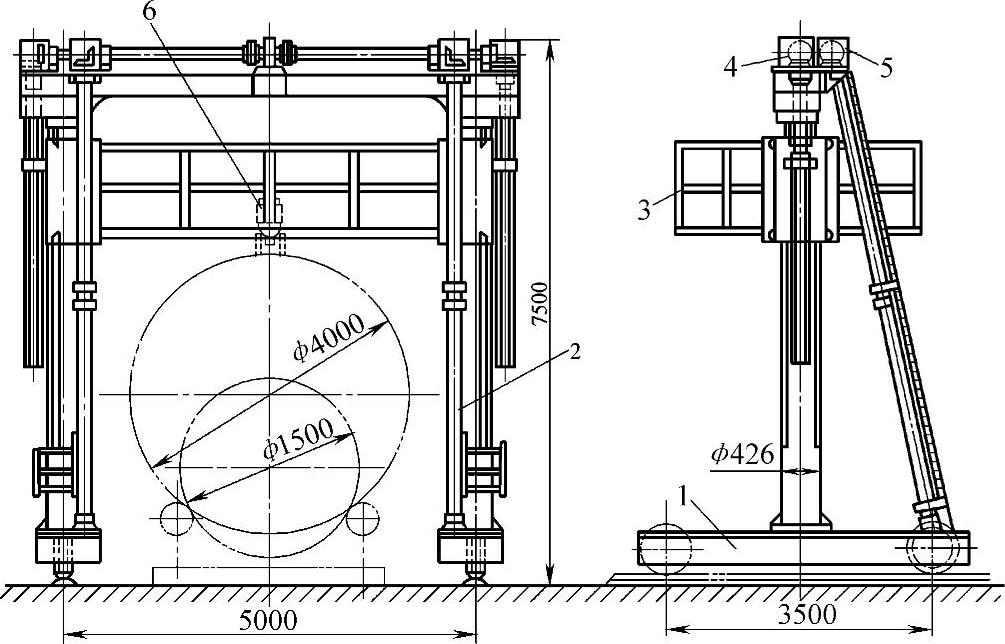
图3-85 门桥式操作机
1—走架 2—立柱 3—平台式横梁 4、5—电动机 6—焊接机头
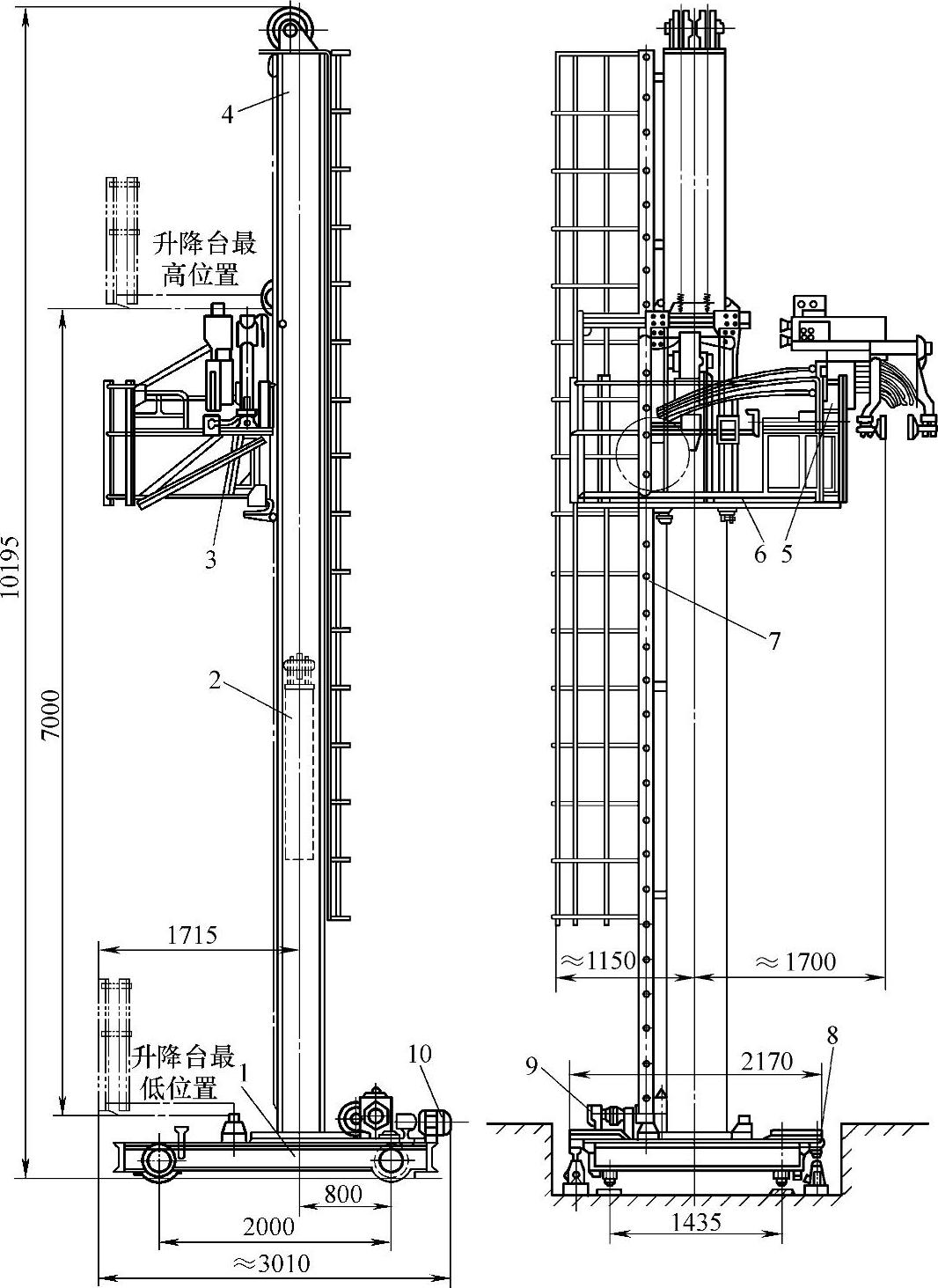
图3-86 电渣焊立架
1—行走台车 2—升降平衡重 3—焊机调节装置 4—焊机升降立柱 5—电渣焊机 6—焊工、焊机升降台 7—扶梯 8—调节螺旋千斤顶 9—起升机构 10—运行机构
电渣焊立架多为板焊结构或桁架结构,一般都安装在行走台车上。台车由电动机驱动,单速运行,可根据施焊要求,随时调整与焊件之间的位置。桁架结构的电渣焊立架由于重量较轻,因此,也常采用手驱动使立架移动。
电渣焊机头的升降运动多采用直流电动机驱动,无级调速。为保证焊接质量,要求电渣焊机头在施焊过程中始终对准焊缝,因此施焊前,要调整焊机升降立柱的位置,使其与立缝平行。调整方式多样,有的采用台车下方的四个千斤顶进行调整;有的采用立柱上下两端的球面铰支座进行调整。在施焊时,还可借助焊机上的调节装置随时进行细调。
有的电渣焊立架,还将工作台与焊机的升降做成两个相对独立的系统,工作台可快速升降,焊机则由自身的电动机驱动,通过齿轮—齿条机构,可沿导向立柱进行多速升降。由于两者自成系统,可使焊机在施焊过程中不受工作台的干扰。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。