



在近年的埋弧焊设备中,可靠性好且在焊接生产中实际应用的坡口检测装置主要是机械-光电转换检测装置与坡口激光检测装置两种。
图4-4为坡口机械-光电转换检测装置在焊接小车式埋弧焊机中的应用,图4-5为坡口机械-光电转换检测装置在串列双丝双弧(Tandem-Twin)悬臂式埋弧焊机中的应用。
图4-4、图4-5中的坡口检测装置(传感器)就是处于焊嘴前面的机械-光电式探头,坡口跟踪的执行机构则是纵/横向滑板与驱动电动机。
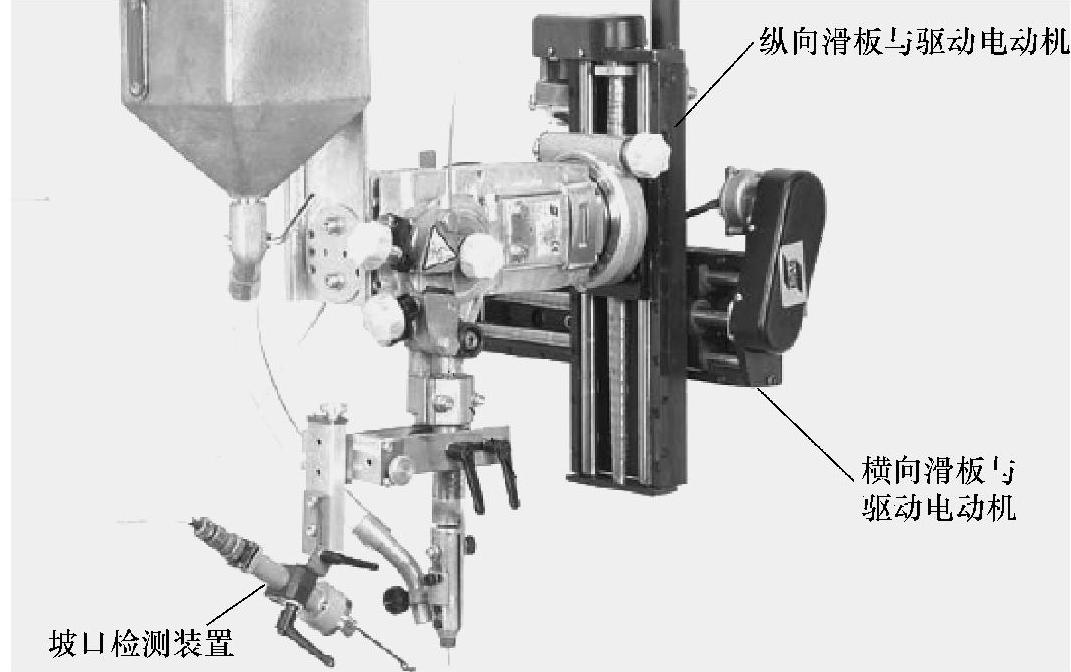
图4-4 埋弧焊的坡口检测装置与执行机构

图4-5 串列双丝双弧埋弧焊头与坡口检测装置
1.坡口探头结构与检测原理
图4-6给出了几种叉型坡口探头的安装和适用的坡口形式。坡口探头适用于所有深宽比小于2的焊缝坡口的检测。
图中,有三个探头检测位置是有一定偏斜角度的,这是对应角焊缝的情况,如图4-7所示。不同类型的坡口形式,要求不同类型的坡口探头,而更换探头的类型,就是更换不同类型的探杆。
图4-8给出探头机械部分的结构图。探头机械结构的核心部分是一个十字联轴器的机构:探杆-探杆延伸杆-探杆延伸杆固定套安装筒是十字联轴器机构的输入轴,十字联轴器的外套是十字联轴器机构的输出轴。
十字联轴器的外套实际使用状态是固定的,这样一来,随着探杆左右、上下的浮动,探杆延伸杆固定套安装筒的端面就以一定的缩小比例反映焊缝坡口左右、上下尺寸的变化。

图4-6 坡口探头的类型与安装
在固定套安装筒的端面的中心,安装了一个发光二极管,如图4-9所示,因此探杆左右、上下的浮动直接转换为发光二极管的左右、上下浮动。
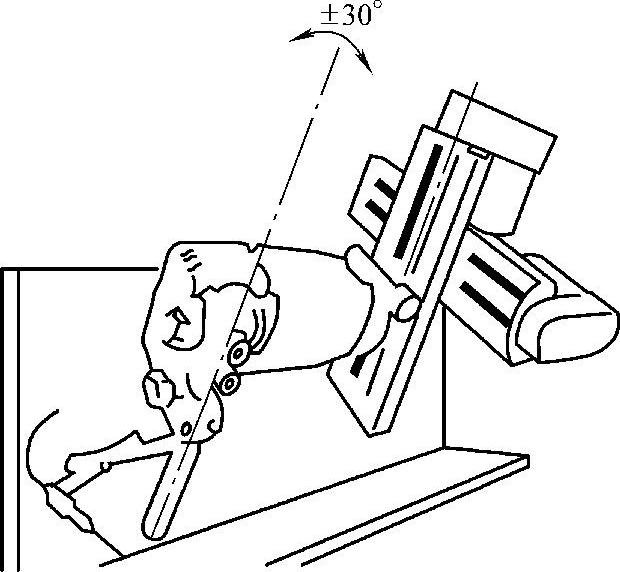
图4-7 角缝焊接的焊头倾斜调节
在坡口机械-光电转换检测器的后座上,安装了4只光敏晶体管,其安装位置对应了下(D)、上(U)、右(R)、左(L)四个方位。
注意:由于探杆相当于一个杠杆,其检测的上、下、左、右位移变化与4只光敏晶体管安装位置U、D、L、R恰好相反。
跟踪时,只要探杆因坡口位置检测(左右、上下)偏离了跟踪起点(焊接开始时的初始零点),发光二极管就会照射到相应的光敏晶体管(U/D/L/R)的光敏基极上,坡口机械-光电转换检测器将坡口位置检测(左右、上下)偏离的机械量,转换为电信号。
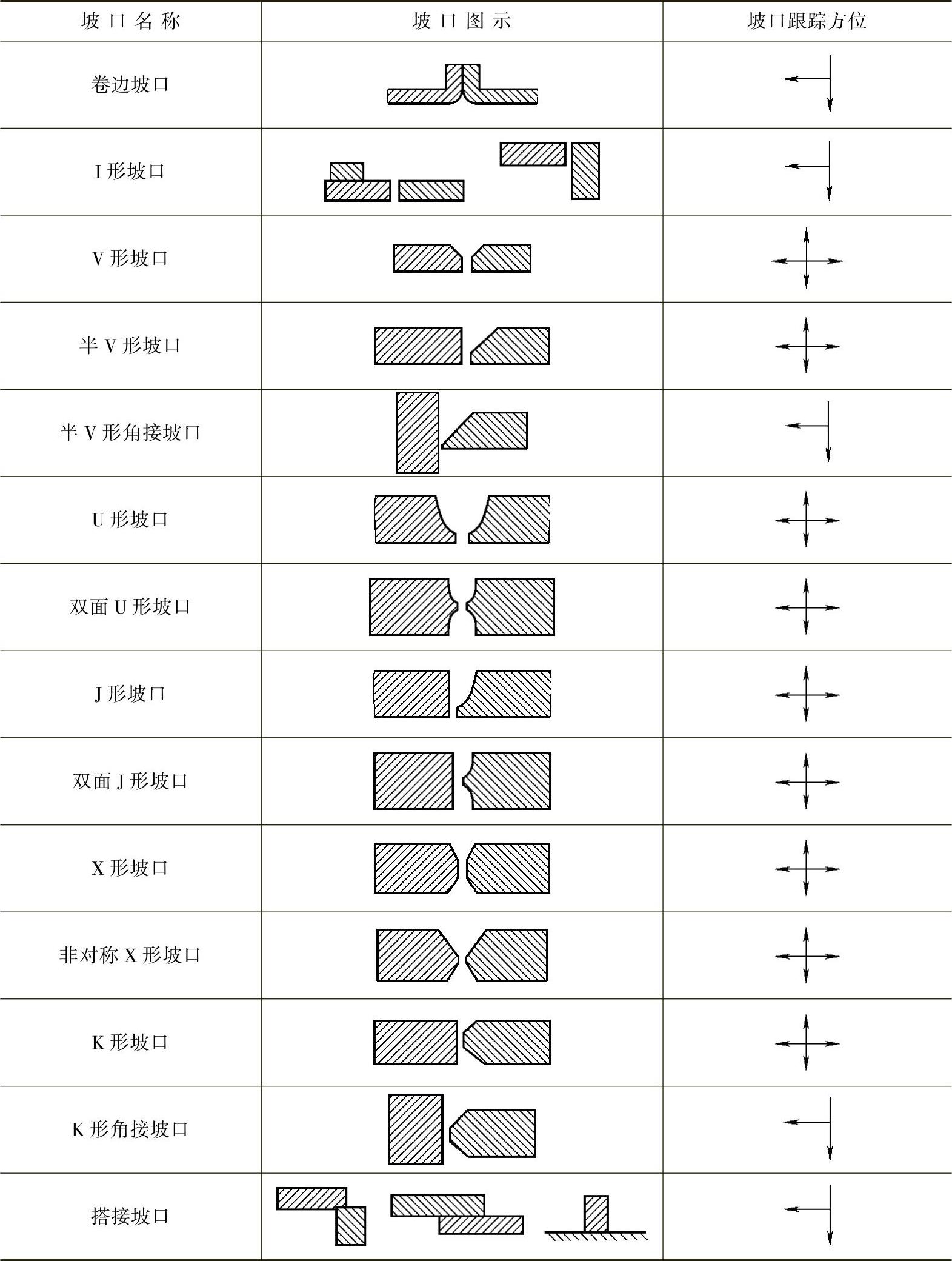
针对实际焊缝的坡口形式,焊接设备生产厂家一般会给出使用坡口机械-光电转换检测器的选用类型,见表4-1。(https://www.xing528.com)
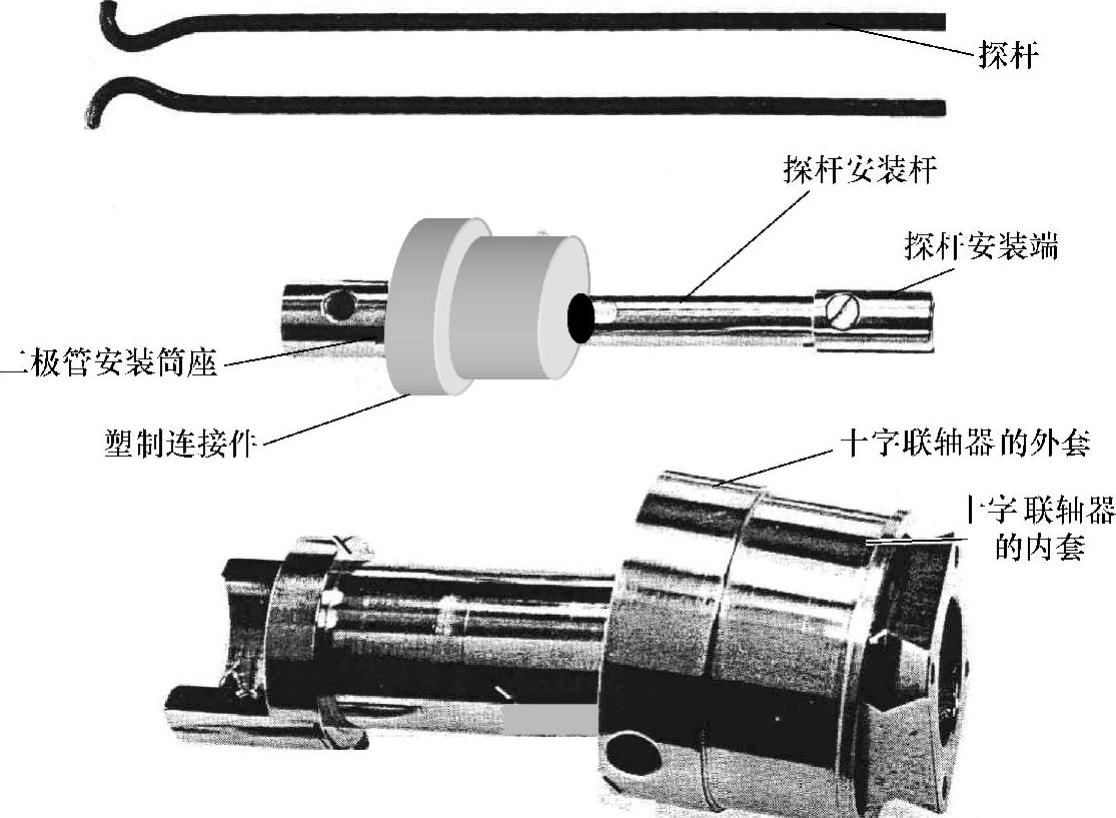
图4-8 探头机械部分的结构
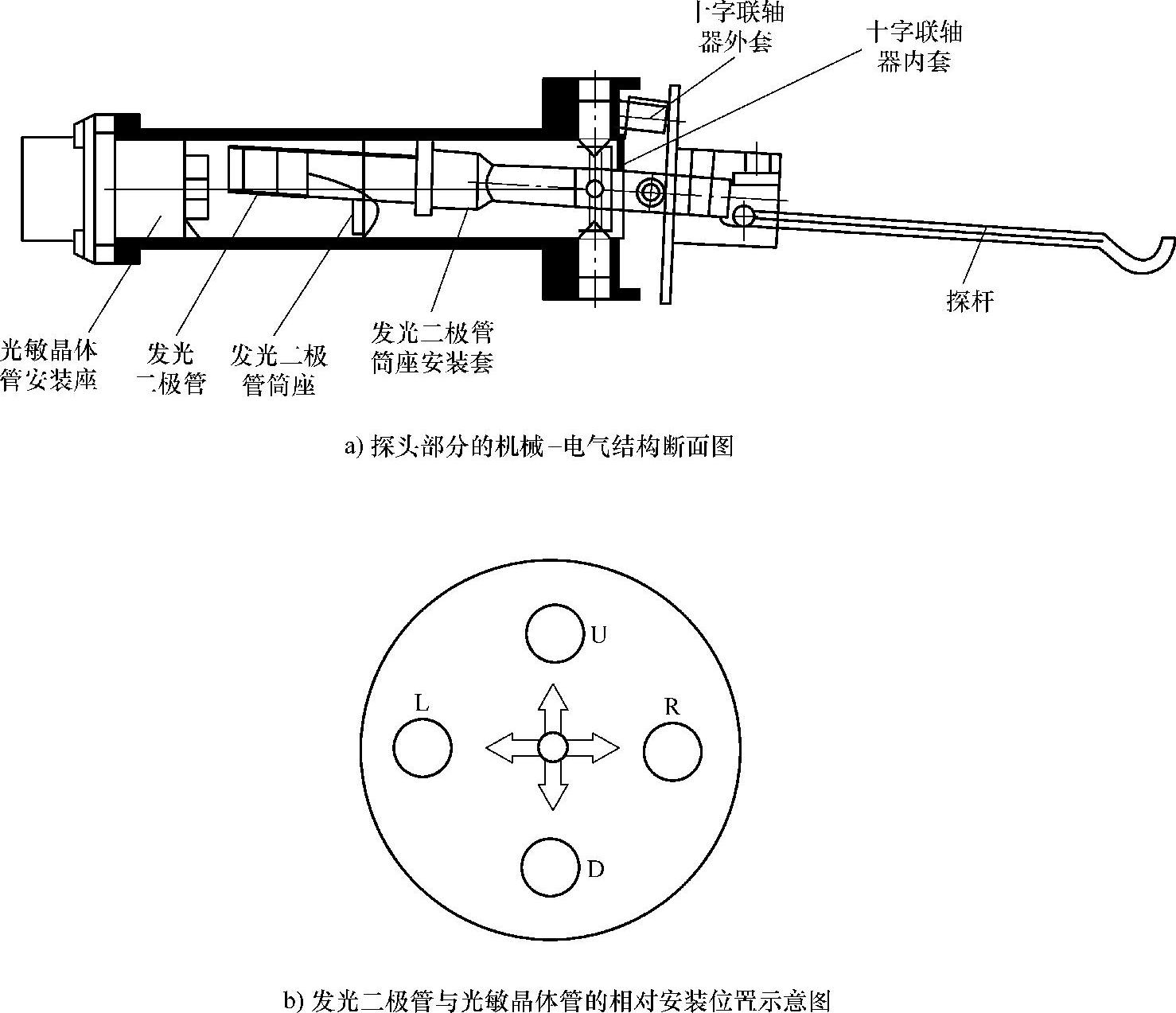
图4-9 探头的机械-电气结构图
表4-1 坡口类型与传感器的选用
为方便用户选用机械-光电转换检测器的类型,厂家在产品使用说明书中还画出机械-光电转换检测器的使用状态,如图4-10所示。
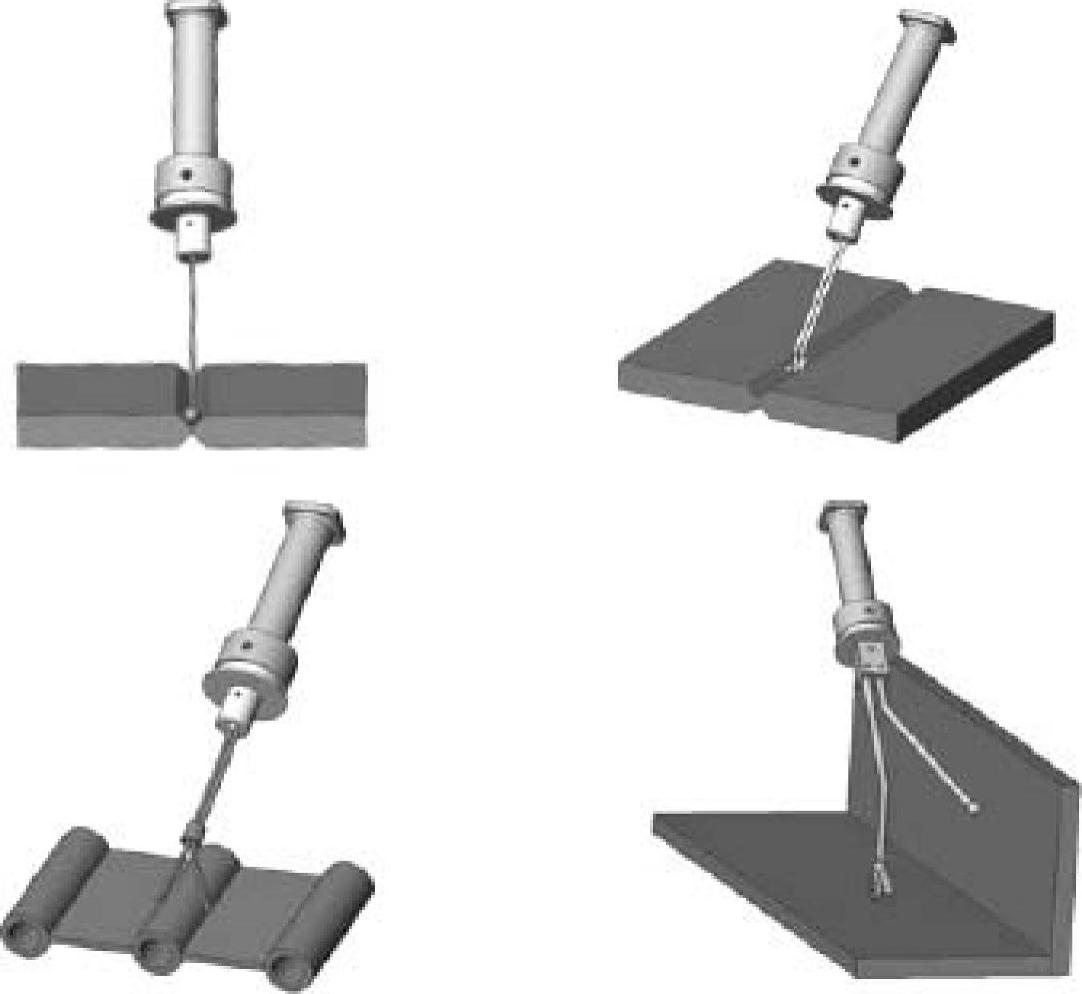
图4-10 机械-光电转换检测器的使用状态
2.跟踪执行机构及其原理
跟踪执行机构就是使焊嘴根据检测的坡口上下、左右的变化量,驱动焊嘴跟随其变化的机构。跟踪执行机构在焊接小车和悬臂式机架的埋弧焊机上用得最多的形式是如图4-11所示的纵/横滑板与驱动电动机结构形式。
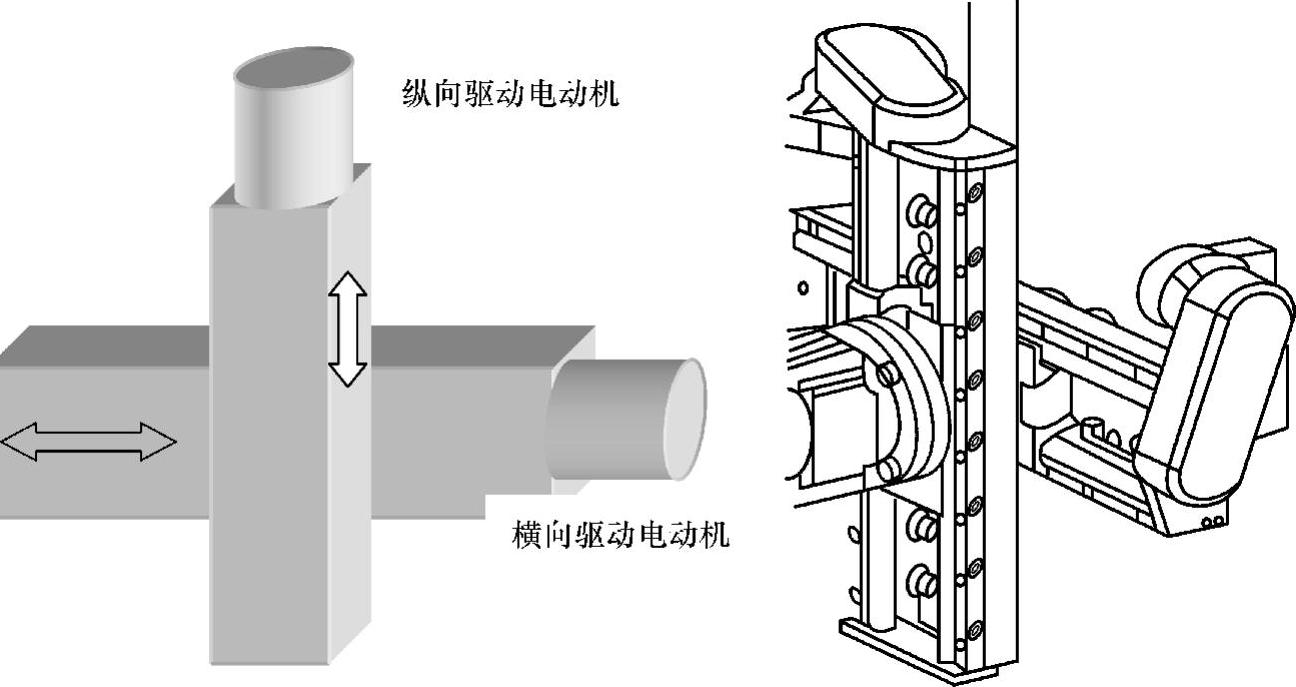
图4-11 纵/横滑板与驱动电动机结构形式
对这种跟踪执行机构的控制,实际上是对两台驱动电动机的控制。
滑板的驱动电动机的控制框图如图4-12所示。图中只画出坡口上、下检测与执行机构(纵向滑板的驱动电动机)功率放大电路。
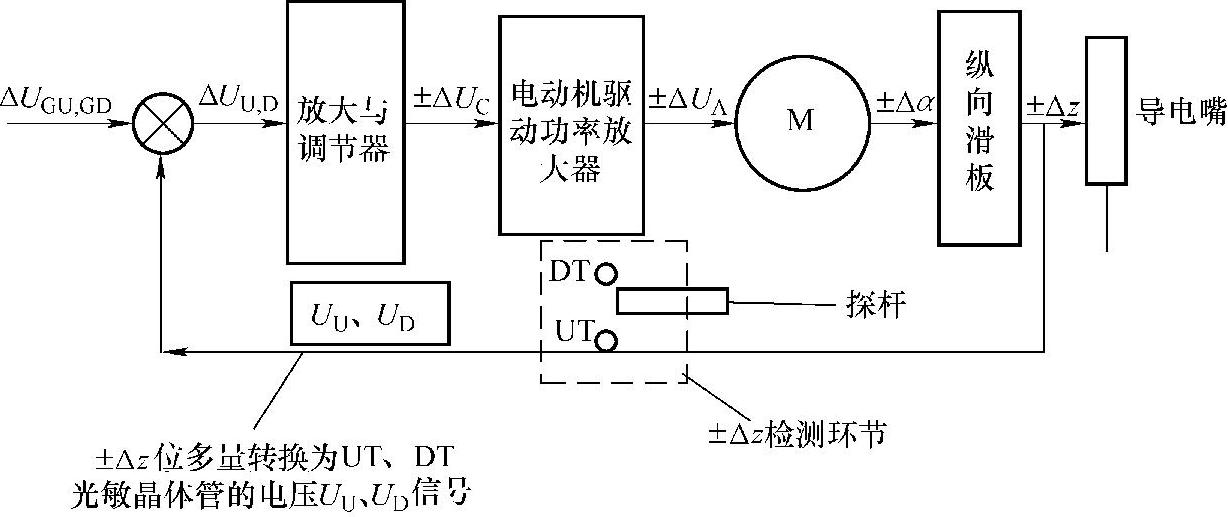
图4-12 滑板的驱动电动机的控制框图
图4-12所示的纵向滑板控制框图中,电压信号UU、UD就是探杆检测到的±Δz位移电压信号。在比较器中,与位移给定电压信号ΔUGU,GD(实际上隐含在坡口传感器的结构中)进行比较,得到偏差信号电压ΔUU,D。ΔUU,D经偏差放大器放大,再送入电动机驱动功率放大器,作为控制纵向滑板上、下运动电动机的驱动功率信号。即功率放大器的输出就是使纵向滑板伺服电动机M产生不同旋转方向的电枢电压±ΔUVA;只要偏差信号电压ΔUU,D不为零,驱动电动机M就会转动,直到偏差信号电压ΔUU,D为零时停止,也就是说,只要检测到坡口位置的变化,电动机M就跟随转动,坡口位置没有变化,电动机M也不动。
同理,横向安装的光敏晶体管L、R,检测到±Δx后,通过偏差放大器、晶闸管功率放大电路,最后输出使水平滑板伺服电动机M产生正反两方向的旋转电枢电压±UHA。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。