



1.硬件闭环PID控制实验装置
为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。FX的仿真软件不能对PID指令仿真,不能用纯软件仿真的方法来做闭环实验。如果有FX系列的PLC,用硬件组成一个闭环需要模拟量输入模块和模拟量输出模块,此外还需要被控对象、检测元件、变送器和执行机构。例如可以用电热水壶作为被控对象,用热电阻检测温度,用温度变送器将温度转换为标准电压,用交流固态调压器作执行机构。
2.用运算放大器模拟被控对象的闭环实验
可以用以运算放大器为核心的模拟电路见图6-19)来代替现场的被控对象,在实验室组成模拟的闭环控制系统。运算放大器应使用双电源,例如±12V的电源。设置模拟量输入、输出模块的量程为±10V。
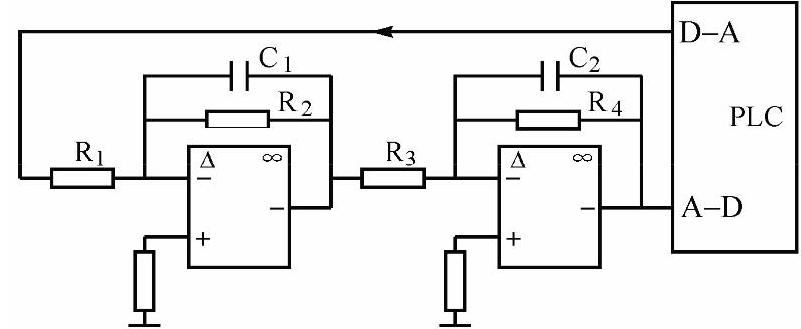
图6-19 模拟被控对象的电路
将运算放大器电路的输出端接到PLC的模拟量输入模块的电压输入端,将PLC模拟量输出模块的电压输出端接到运算放大器电路的输入端,这样就组成了一个模拟的闭环控制系统。
可以用图6-19中的运算放大器电路来模拟一阶惯性环节、两个串连的惯性环节,或串连的惯性环节与积分环节。图中左边的运算放大器电路的传递函数为

式中K=R2/R1,T=R2C1,s是拉氏变换中的拉普拉斯算子。右边的运算放大器的传递函数可以用类似的方法求得。
如果断开图中的C2,则右边的运算放大器变为反相器,其传递函数为G2(s)=-R4/R3。如果断开图中的R4,则右边的运算放大器变为积分器,其传递函数为G2(s)=-1/(R3C2s)。模拟对象总的传递函数为G(s)=G1(s)·G2(s)。电阻和电容的值应取大一些,使传递函数中的时间常数为秒级。可以在电路板上设置DIP开关,用它来改变被控对象传递函数的结构和参数。
3.纯软件闭环PID实验
西门子的S7-300/400 PLC的功能块FB 41是PID控制的子程序,S7-300/400的仿真软件PLCSIM可以对FB 41仿真。此外西门子还提供了一个用来模拟被控对象、检测元件和执行机构的功能块FB 100。用FB 41和FB 100可以组成虚拟的PID闭环控制系统,用计算机对PID控制系统仿真。
通过设置PID控制器的参数,用仿真软件执行闭环控制程序后,观察被控量的变化情况,通过被控量阶跃响应曲线的形状,估算超调量和调节时间等性能指标,就可以判断出控制的品质。可以根据前述的参数整定方法修改PID控制器的参数,直到得到比较理想的控制效果。
作者编写的《跟我动手学S7-300/400 PLC》和《S7-300/400 PLC应用技术》第3版详细介绍了纯软件闭环PID仿真程序的设计方法和做仿真实验的方法。《跟我动手学S7-300/400 PLC》用西门子人机界面的组态软件WinCC flexible的趋势图,显示PID控制的设定值SV和被控量c(t)的曲线。
《S7-300/400 PLC应用技术》第3版使用S7-300/400的编程软件集成的PID控制参数赋值工具来修改PID的参数,显示PID控制的设定值和被控量的曲线。该书详细地介绍了PID控制参数赋值工具的使用方法。本节后面的PID控制的阶跃响应曲线来自PID控制参数赋值工具。
这两本书的随书光盘提供了PID闭环控制仿真程序和仿真所需的全部软件。
根据读者或使用本书的学校的具体条件,可以选择3种实验方式:
1)全部采用硬件的PID控制实验。
2)使用硬件PLC,用运算放大器来模拟被控对象、执行器和检测元件的PID控制实验。
3)S7-300/400的PID控制纯软件仿真实验。
4.PID闭环控制仿真结果介绍(https://www.xing528.com)
图6-20~图6-26给出了PID控制器的主要参数,图6-20中曲线的超调量过大,有多次振荡。将图中的积分时间由2s改为4s,单击PID控制参数赋值工具的工具条上的下载按钮  ,将修改后的参数下载到仿真PLC。与图6-20中积分时间为2s的曲线相比,增大积分时间(减弱积分作用)后,图6-21中响应曲线的超调量和振荡次数明显减小。
,将修改后的参数下载到仿真PLC。与图6-20中积分时间为2s的曲线相比,增大积分时间(减弱积分作用)后,图6-21中响应曲线的超调量和振荡次数明显减小。
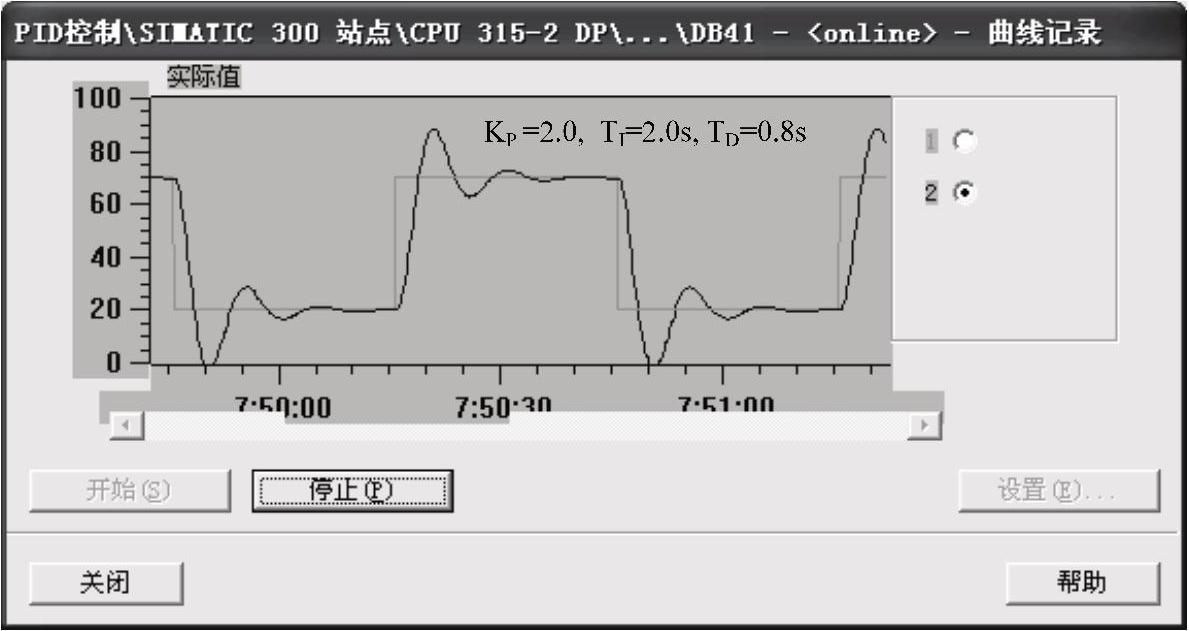
图6-20 曲线记录对话框
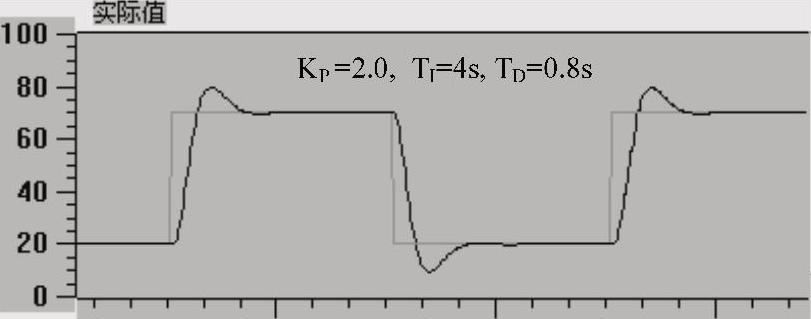
图6-21 PID控制阶跃响应曲线
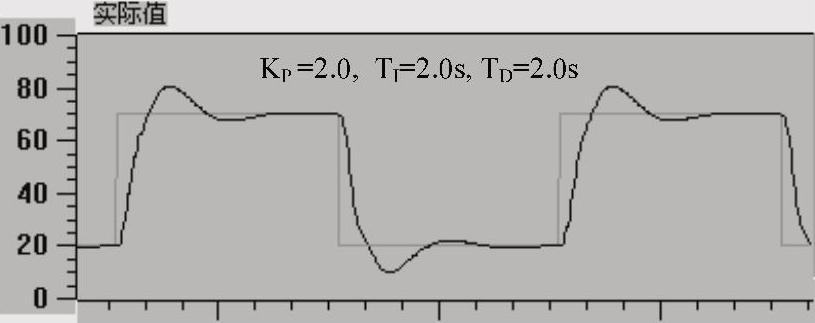
图6-22 PID控制阶跃响应曲线
将图6-21中的积分时间还原为2s,微分时间由0.8s增大为2s。与图6-20中的曲线相比,适当增大微分时间后,图6-22中响应曲线的超调量和振荡次数明显减小。
将图6-22中的积分时间改为8s,微分时间仍然为2s。与图6-20中的曲线相比(积分时间为2s,微分时间为0.8s),增大积分时间和适当增大微分时间后,图6-23中响应曲线的超调量几乎为0,但是付出的代价是第一次上升到稳态值的时间较长。
微分时间也不是越大越好,图6-24的微分时间增大到4s,因为微分作用过强,在误差剧烈变化时,对误差变化的抑制作用太强,曲线上出现了“毛刺”,曲线变得很怪异。这种现象提示应减弱微分部分。
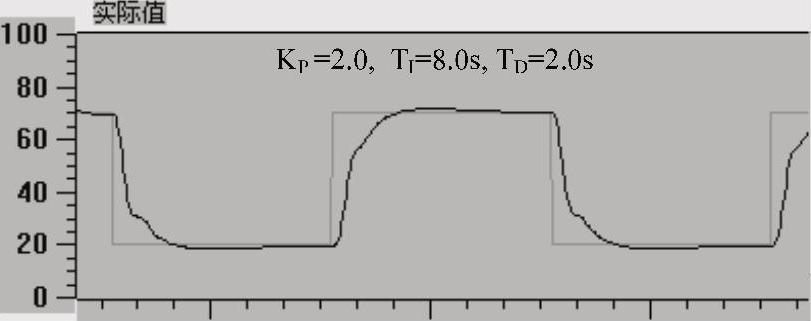
图6-23 PID控制阶跃响应曲线
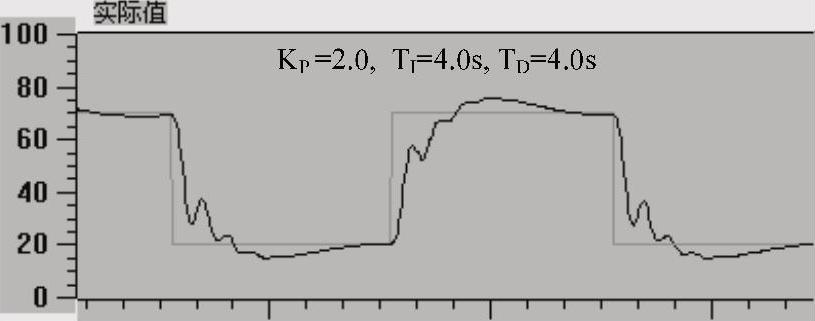
图6-24 PID控制阶跃响应曲线
图6-25和图6-26的微分时间均为0(即采用PI调节),积分时间均为8s。图6-25的比例增益为2.0,图6-26的比例增益为1.0,减小了比例增益后,同时减弱了比例作用和积分作用。可以看出,减小比例增益能显著降低超调量。但是付出的代价是上升时间tr增大。
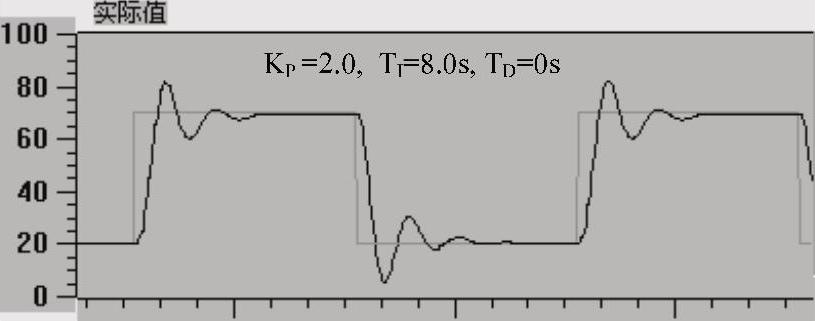
图6-25 PI控制阶跃响应曲线
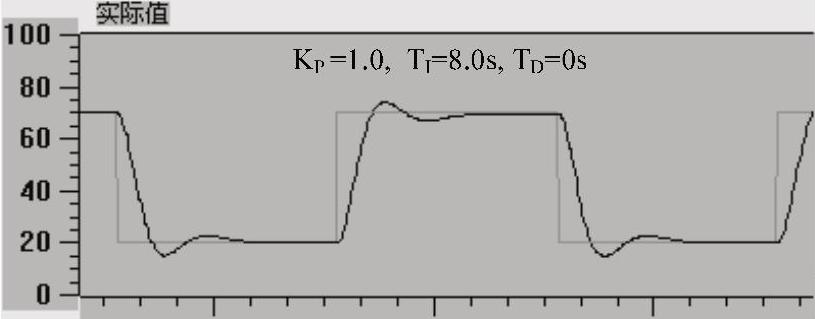
图6-26 PI控制阶跃响应曲线
读者可以修改程序中FB 100(被控对象)的参数,下载到仿真PLC后,调整PID控制器的参数,直到得到较好的响应曲线,即超调量较小,过渡过程时间较短。也可以修改采样周期,了解采样周期与控制效果之间的关系。通过仿真实验,可以较快地掌握PID参数的整定方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。