



1.PID控制器的输入/输出关系式
典型的PID模拟量控制系统如图6-8所示。图中的各物理量均为模拟量,sv(t)是设定值,pv(t)为测量值,c(t)为被控量,PID控制器的输入/输出关系式为

式中误差信号ev(t)=sv(t)-pv(t),mv(t)是PID控制器的输出值,KP是控制器的比例增益,TI和TD分别是积分时间和微分时间,M是积分部分的初始值。PID控制程序的主要任务就是实现式(6-1)中的运算,因此有人将PID控制器称为PID控制算法。
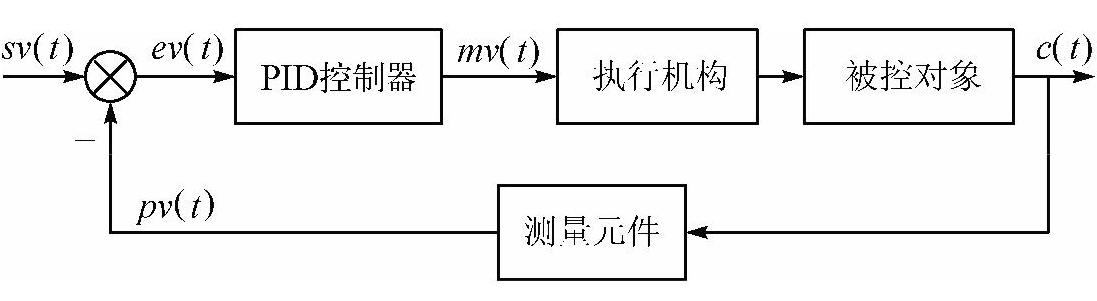
图6-8 模拟量闭环控制系统方框图
式(6-1)中等号右边3项分别是输出量中的比例(P)部分、积分(I)部分和微分D)部分,它们分别与误差ev(t)、误差的积分和误差的导数成正比。如果取其中的一项或两项,则可以组成P、PD或PI控制器。需要较好的动态品质和较高的稳态精度时,可以选用PI控制方式;控制对象的惯性滞后较大时,应选择PID控制方式。
2.改进的PID控制算法
改进的PLC模拟量闭环控制系统如图6-9所示,虚线中的部分是用PLC实现的。图中的SVn等下标中的n表示是第n次采样时的数字量,pv(t)、mv(t)和c(t)为模拟量。
用PLC实现PID控制时,PID控制器实际上是以指令形式出现的一段程序。PID指令是周期性执行的,执行的周期称为采样周期(TS)。
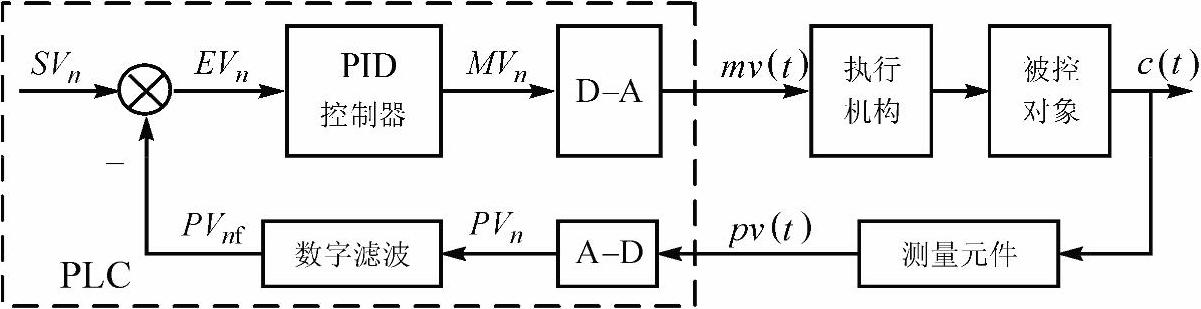
图6-9 PLC闭环控制系统方框图
FX系列的PID指令采用了一阶惯性数字滤波、不完全微分和反馈量微分等措施,使该指令比标准的PID算法具有更好的控制效果。
(1)一阶惯性数字滤波
模拟量反馈信号pv(t)中可能混杂有干扰噪声,采样后可以用一阶惯性数字滤波器(见图6-9)来滤除,Tf是滤波器的时间常数。输入滤波常数α=Tf/(Tf+TS),TS为采样周期。α的取值范围为0~1,α越大,滤波效果越好;α过大会使系统的响应迟缓,动态性能变坏。
(2)不完全微分PID
微分的引入可以改善系统的动态性能,但是也容易引入高频干扰,为此在微分部分增加了一阶惯性滤波,以平缓输出值的剧烈变化。微分增益KD是不完全微分的滤波时间常数与微分时间TD的比值。这种算法称为不完全微分PID算法。
(3)反馈量微分PID
计算机控制系统的设定值SVn一般用键盘来修改,这样会导致SVn发生阶跃变化。因为误差EVn=SVn-PVnf(见图6-9),SVn的突变将会使误差EVn和PID的输出量MVn突变,不利于系统的稳定运行。为了消除给定值突变的影响,只对反馈量PVnf微分,这种算法称为反馈量微分PID算法。
3.PID指令
图6-10是PLC闭环控制系统的示意图。系统当前的模拟量反馈信号pv(t)被模拟量输入模块FX2N-4AD转换为数字量PV,经滤波和PID运算后,将PID控制器的输出量MV送给模拟量输出模块FX2N-4DA,后者输出的模拟量mv(t)送给执行机构(例如电动调节阀)。(https://www.xing528.com)
图6-11给出了一个PID控制程序的例子,PID回路运算指令的应用指令编号为FNC 88,源操作数(S1)、(S2)、(S3)和目标操作数(D)均为数据寄存器D。(S1)和(S2)分别用来存放设定值SV和本次采样的测量值(即反馈值)PV,PID指令占用起始软元件号为(S3)的连续的25个数据寄存器,用来存放控制参数的值,运算结果(PID输出值)MV用目标操作数(D)存放。
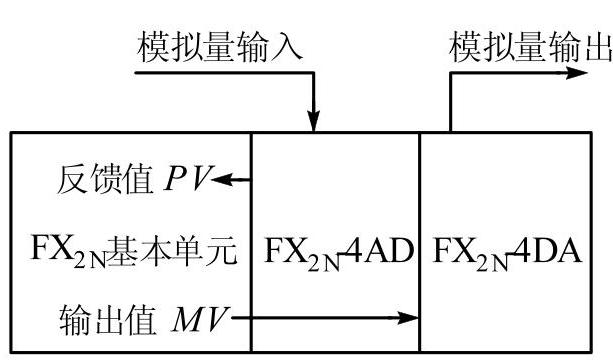
图6-10 PID控制系统示意图
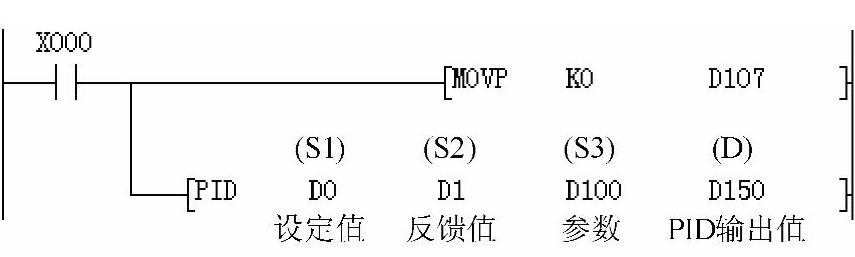
图6-11 PID指令
在开始执行PID指令之前,应使用MOV指令将各参数和设定值预先写入指令指定的数据寄存器(见表6-3)。如果使用有断电保持功能的数据寄存器,则不需要重复写入。如果目标操作数(D)有断电保持功能,则应使用初始化脉冲M8002的常开触点将它复位。
PID指令可以在定时器中断、子程序、步进梯形指令区和跳转指令中使用,但是在执行PID指令之前应使用脉冲执行的MOVP指令将(S3)+7清零(见图6-11的D107)。
控制参数的设定和PID运算中的数据出现错误时,“运算错误”标志M8067为ON,错误代码存放在D8067中。
PID指令可以同时多次调用,但是每次调用时使用的数据寄存器的软元件号不能重复。
4.正动作与反动作
正动作与反动作是指PID的输出值与测量值之间的关系。在开环状态下,PID输出值控制的执行机构的输出增加使测量值增大的是正动作;使测量值减小的是反动作。
加热炉温度控制系统的PID输出值如果增大,将使调节阀的开度增大,被控对象的温度升高,这就是一个典型的正动作。制冷则恰恰相反,PID输出值如果增大,空调压缩机的输出功率增加,使被控对象的温度降低,这就是反动作。可以用PID指令的参数ACT的第0位来设置采用正动作或反动作。
5.PID指令的参数
PID指令的源操作数(S3)是25个数据寄存器组成的参数区的首个软元件号,部分参数的意义见表6-3。
表6-3 PID指令的部分参数
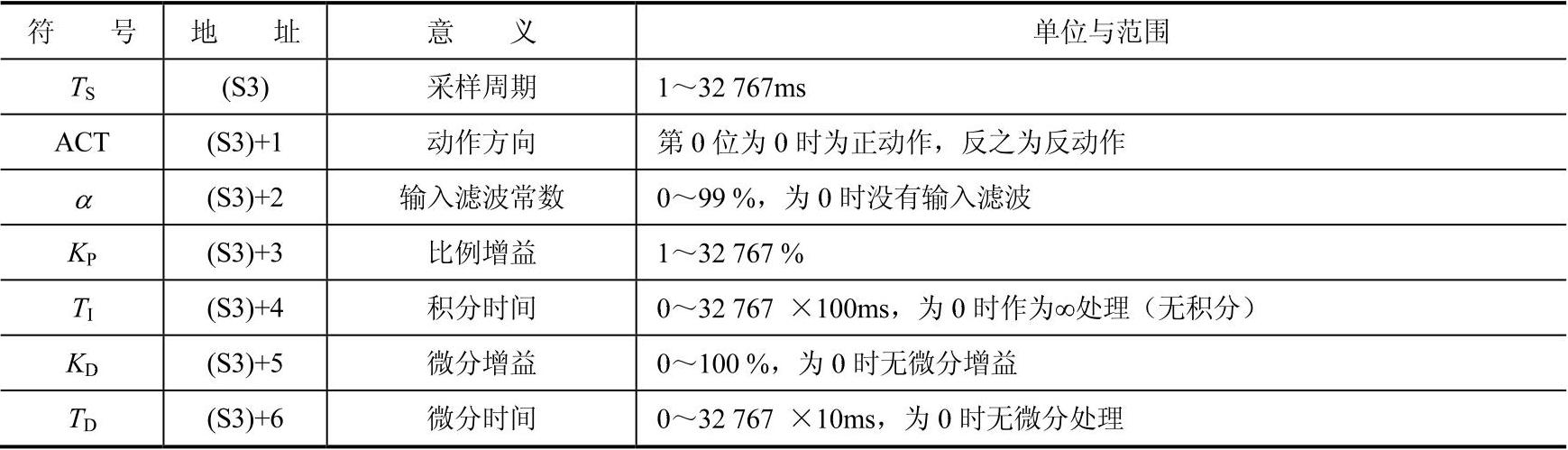
动作方向ACT((S3)+1)中的第0~2位用来设置正动作/反动作、是否允许输入量变化报警和输出量变化报警,第4位用于是否执行自整定,第5位用于输出值上、下限设定是否有效。微分增益KD是不完全微分的滤波时间常数与微分时间TD的比值。
PID参数表中的(S3)+7~(S3)+19被PID运算的内部处理占用。(S3)+20~(S3)+23分别用于测量值PVnf的上限、下限报警设定值,以及PID输出值MV的上限、下限报警设定值。
(S3)+24为报警输出,其第0~3位为1分别表示测量值PVnf超上限和超下限、PID输出值MV超上限和超下限。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。