



本节前面介绍了使用置位复位指令的多种工作方式的编程方法,它的优点是程序结构简单清晰,程序框架可用于其他控制系统。这种编程方法也可以用于任意厂家的PLC。
针对使用STL指令的多种工作方式的控制程序,FX系列提供了专用的状态初始化指令IST、配套的初始状态S0~S9、特殊辅助继电器M8040~M8047和特殊数据寄存器D8040~D8047。
STL指令不能用于子程序,使用STL指令的多种工作方式的控制程序表面上看只有一个主程序,实际上分为从第0步开始的初始化程序、指令“STL S0”开始的手动程序、指令“STL S1”开始的回原点程序和指令“STL S2”开始的自动程序。下一个程序的开始标志着前一个程序的结束。根据方式选择开关的状态,CPU分别调用不同的程序。
1.公用程序
图5-55的前3块电路为公用程序。满足原点条件时,M8044为ON。
从自动工作方式切换到手动或自动回原点工作方式时(X10或X11为ON),将自动程序中的S20~S27复位。
退出自动回原点工作方式时(X11为OFF),将自动回原点的顺序功能图(见图5-58)中的S10~S15复位。
2.初始化程序
FX系列PLC的状态初始化指令IST(Initial State)的功能指令编号为FNC 60,它与STL指令一起使用,专门用来设置具有多种工作方式的控制系统的初始状态,以及设置有关的特殊辅助继电器的状态。使用该指令可以简化复杂的顺序控制程序的设计工作。IST指令只能使用一次,它应放在程序开始的地方,被它控制的STL电路应放在它的后面。
机械手控制系统的顺序功能图和梯形图如图5-55~图5-58所示(见随书光盘中的例程“机械手控制2”)。该系统的初始化程序用来设置初始状态和原点位置条件。IST指令中的目标操作数S20和S27用来指定在自动操作中用到的最低和最高的状态的软元件号,IST中的源操作数(S·)可以取X、Y和M,用来指定与操作有关的输入继电器的首软元件号。如果这些输入继电器的地址不连续,则可以用它们来控制IST指令指定的辅助继电器。图5-55中IST指令的源操作数(S·)为M30,它实际上指定了M30~M37具有以下的意义:
M30(X10):手动
M31(X11):回原点
M32(X12):单步运行
M33(X13):单周期运行(半自动)
M34(X14):连续运行(全自动)
M35(X16):回原点起动
M36(X16):自动操作起动
M37(X17):停止
M30~M37与X10~X17的对应关系是用图5-55所示的电路实现的,图中的“回原点SW”是回原点开关的缩写。如果增设X15为回原点起动按钮,并且在IST指令中将第一个操作数M30改为X10,则可以省略图5-55中从程序步第28步~第41步这几行的程序,该程序主要是为回原点起动和自动操作起动共用一个按钮X16服务的。
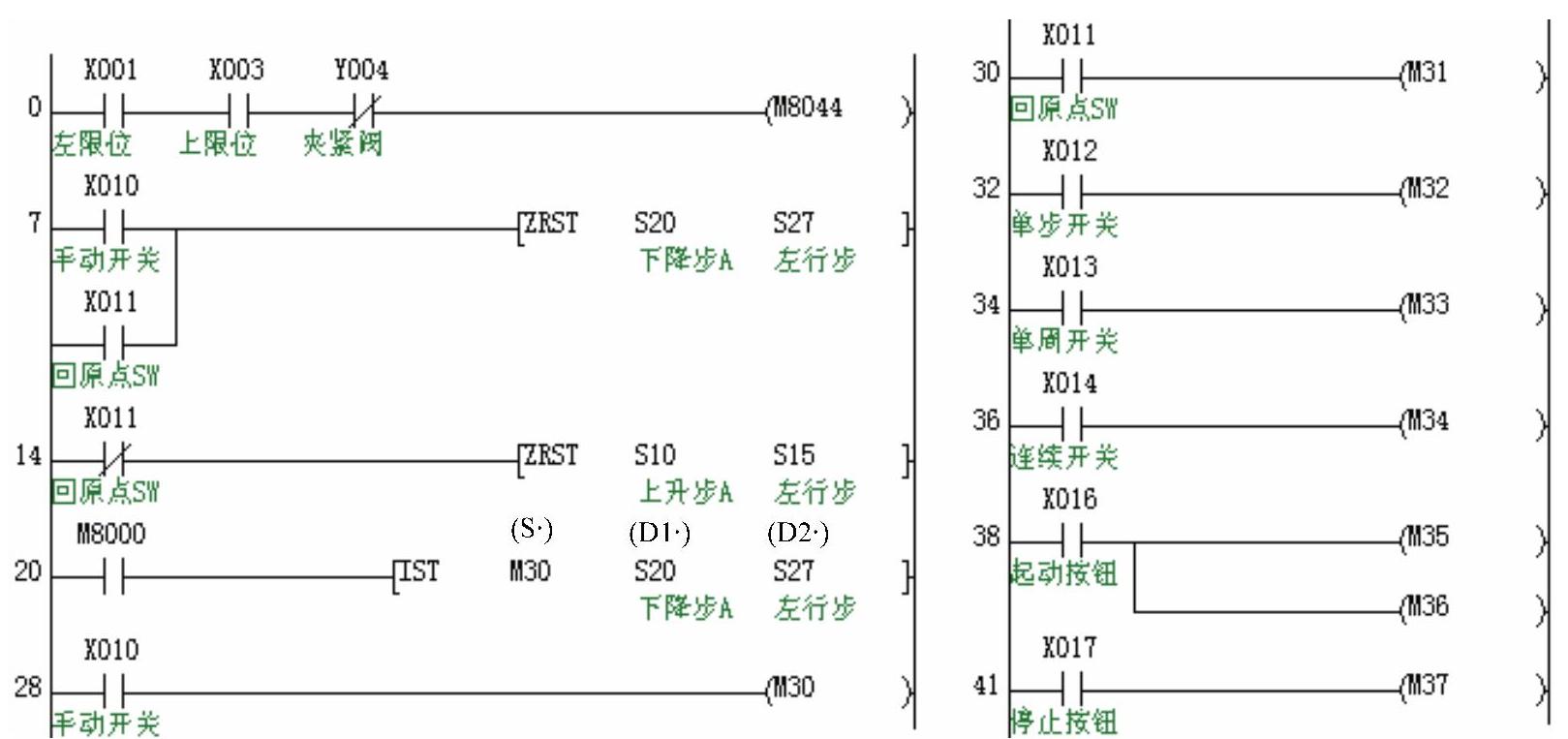
图5-55 初始化程序与公用程序
如果在图5-55中用总是处于OFF状态的M8000的常闭触点来控制M32的线圈,则可以取消单步运行方式。
与工作方式开关对应的X10~X14中同时只能有一个处于ON状态,必须使用选择开关见图5-47),以保证这5个输入中不可能有两个同时为ON。
IST指令的执行条件满足时,初始状态S0~S2和下列特殊辅助继电器被自动指定为以下功能,以后即使IST指令的执行条件变为OFF,这些软元件的功能仍保持不变。
S0:手动操作的初始状态
S1:回原点操作的初始状态
S2:自动操作的初始状态
M8040:禁止转换,为1时禁止所有的状态转换
M8041:转换开始(从初始状态的转换被允许,连续标志)
M8042:起动脉冲(按下起动按钮时的脉冲输出)
M8043:回原点完成
M8044:原点条件满足
M8045:禁止所有输出复位
M8046:STL状态动作(至少有一个状态为ON)
M8047:STL监控有效
3.M8040~M8049功能的仿真实验
打开随书光盘中的例程“机械手控制2”,启动仿真软件GX Simulator和软元件监视视图,生成X窗口、Y窗口和S窗口,同时启动软元件批量监视视图。从M8040开始监视与IST指令有关的M8040~M8049。按下面的步骤进行仿真操作:
1)令所有的输入继电器都为默认的OFF状态,只有M8040和M8047为ON,禁止转换。
2)令X10为ON,进入手动工作方式,手动程序的初始步S0和M8046变为ON。
3)令左限位开关X1和上限位开关X3为ON,M8043和M8044变为ON,原点条件满足。
4)令X10为OFF,X13为ON,切换到单周期模式,自动程序的初始步S2变为ON。
5)两次双击X16,模拟起动按钮的点动操作,M8040变为OFF,由禁止转换变为允许转换,同时M8043(回原点完成)变为OFF。M8042(起动脉冲)在X16的上升沿ON一个扫描周期。
6)在手动模式满足原点条件,然后切换到连续方式。两次双击起动按钮X16,S2变为ON,同时M8041变为ON。两次双击停止按钮X17,M8041变为OFF。M8041相当于项目“机械手控制1”中的连续标志M7,使系统按连续方式运行。(https://www.xing528.com)
在单周期方式,起动按钮不会使M8041变为ON,在初始步S2按下起动按钮,只能工作一个周期。
7)在手动方式满足原点条件,然后切换到单步方式,S2变为ON。M8040一般情况为ON,禁止转换。仅在起动按钮X16的上升沿的一个扫描周期M8040为OFF,短暂地解除了对转换的禁止。因此在单步模式,即使转换条件满足,也需要按一次起动按钮,才能转换到下一步。M8040的作用类似于项目“机械手控制1”中的转换允许标志M5的常闭触点。
8)STL监控有效标志M8047的线圈“通电”时,当前的活动步对应的状态的软元件号按从大到小的顺序排列,存放在特殊数据寄存器D8040~D8047中,由此可以监控8点活动步对应的状态的软元件号。此外,若有任何一个状态为ON,特殊辅助继电器M8046将为ON。
因为顺序功能图中没有并行序列,任何时候只有一个活动步,可以用D8040监视当前的活动步的软元件号。
4.手动程序
手动程序、自动程序(单周期、连续和单步)和回原点程序分别用S0、S2和S1控制,这3部分程序不会同时被执行。用STL指令和IST指令编程时,不采用图5-48的调用子程序的程序结构。
手动程序(见图5-56)与图5-50中的程序基本上相同。
5.自动程序
用STL指令设计的自动程序的顺序功能图如图5-57所示,特殊辅助继电器M8041(转换起动)和M8044(原点条件)是从自动程序的初始步S2转换到下一步S20的转换条件。
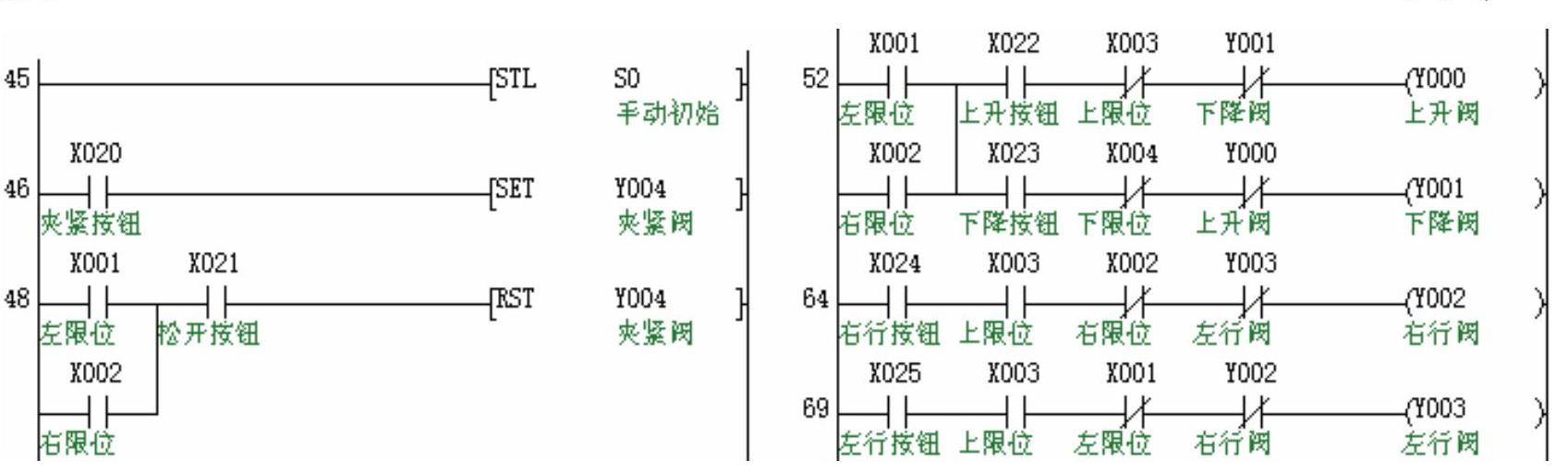
图5-56 手动程序
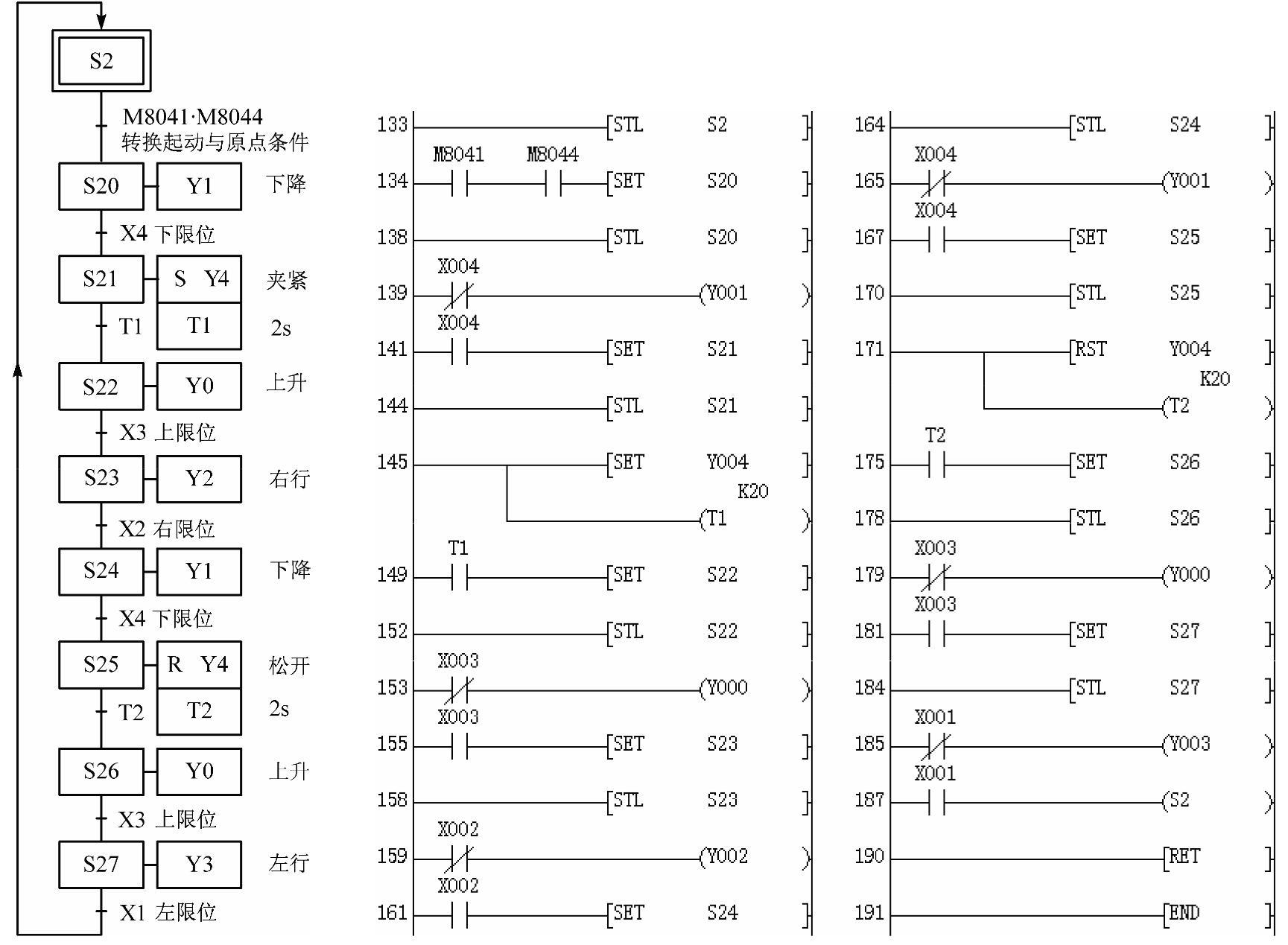
图5-57 自动程序
使用IST指令后,系统的手动、自动、单周期、单步、连续和回原点这几种工作方式的切换是系统程序自动完成的,但是必须按照图5-55的要求,安排IST指令中指定的控制工作方式用的辅助继电器M30~M37和输入继电器X10~X17的软元件号顺序。
3种工作方式的切换是通过特殊辅助继电器M8040~M8042实现的,IST指令自动驱动它们。
6.自动返回原点程序
自动返回原点的顺序功能图中的步应使用S10~S19(见图5-58)。原点条件满足时,特殊辅助继电器M8044(原点条件)为ON(见图5-55的公用程序中的控制电路)。
自动返回原点的操作结束后,用SET指令将M8043(回原点完成)置为ON,并用RST指令将回原点顺序功能图中的最后一步S16复位。
7.仿真实验
打开随书光盘中的例程“机械手控制2”,启动仿真软件GX Simulator和软元件监视视图,生成X窗口、Y窗口和S窗口。
(1)手动程序的调试
令X10为ON,进入手动工作方式。观察手动程序的初始步S0是否为ON。
根据手动程序,逐个检查各输出继电器的控制电路的功能是否正常,是否能用手动按钮X20~X25控制电磁阀Y0~Y4,电路中的各联锁触点是否起作用。
(2)单周期工作方式
在手动模式令左限位开关X1和上限位开关X3为ON,满足原点条件。令X10为OFF,X13为ON,切换到单周期方式。S0变为OFF,自动程序的初始步S2变为ON(见图5-57)。
两次双击X16,模拟起动按钮的点动操作,观察是否能从自动方式的初始步S2切换到下降步S20,即S2变为OFF,S20变为ON。
根据顺序功能图,在各步提供相应的转换条件(不包括定时器产生的转换条件),观察步与步之间的转换是否正常,各步的动作(输出继电器和定时器的线圈状态)是否正确。是否能从左行步S27返回初始步S2。
(3)连续工作方式
在自动程序的初始步S2,令单周期开关X13为OFF,连续开关X14为ON,进入连续工作方式。两次双击X16,模拟起动按钮的点动操作,观察是否能从初始步S2切换到下降步S20。按照与单周期方式相同的方法,根据顺序功能图,在各步提供相应的转换条件,观察步与步之间的转换是否正常。在左行步S27时,令左限位开关X1为ON,观察是否能返回下降步S20。在以后的某一步两次双击X17,模拟停止按钮的点动操作,观察连续标志M8041是否变为OFF,完成最后一个周期剩余各步的任务后,从左行步S27是否能返回初始步S2。
(4)单步工作方式
在初始步S2为ON时,令连续开关X14为OFF,单步开关X12为ON,进入单步工作方式。两次双击X16,模拟按下和松开起动按钮,观察是否能从初始步S2切换到下降步S20。
在下降步令下限位开关X4为ON,两次双击起动按钮X16,观察是否能转换到夹紧步S21。两秒钟后两次双击X16,观察是否能转换到上升步S22。以后的每一步都需要在转换条件满足时,两次双击X16,提供起动按钮信号,才能转换到下一步,直到回到初始步。
(5)回原点工作方式
令单步开关X12为OFF,回原点开关X11为ON,进入回原点工作方式,S2变为OFF,回原点方式的初始步S1变为ON。按使用STL指令回原点工作方式的顺序功能图(见图5-58)检查回原点程序。
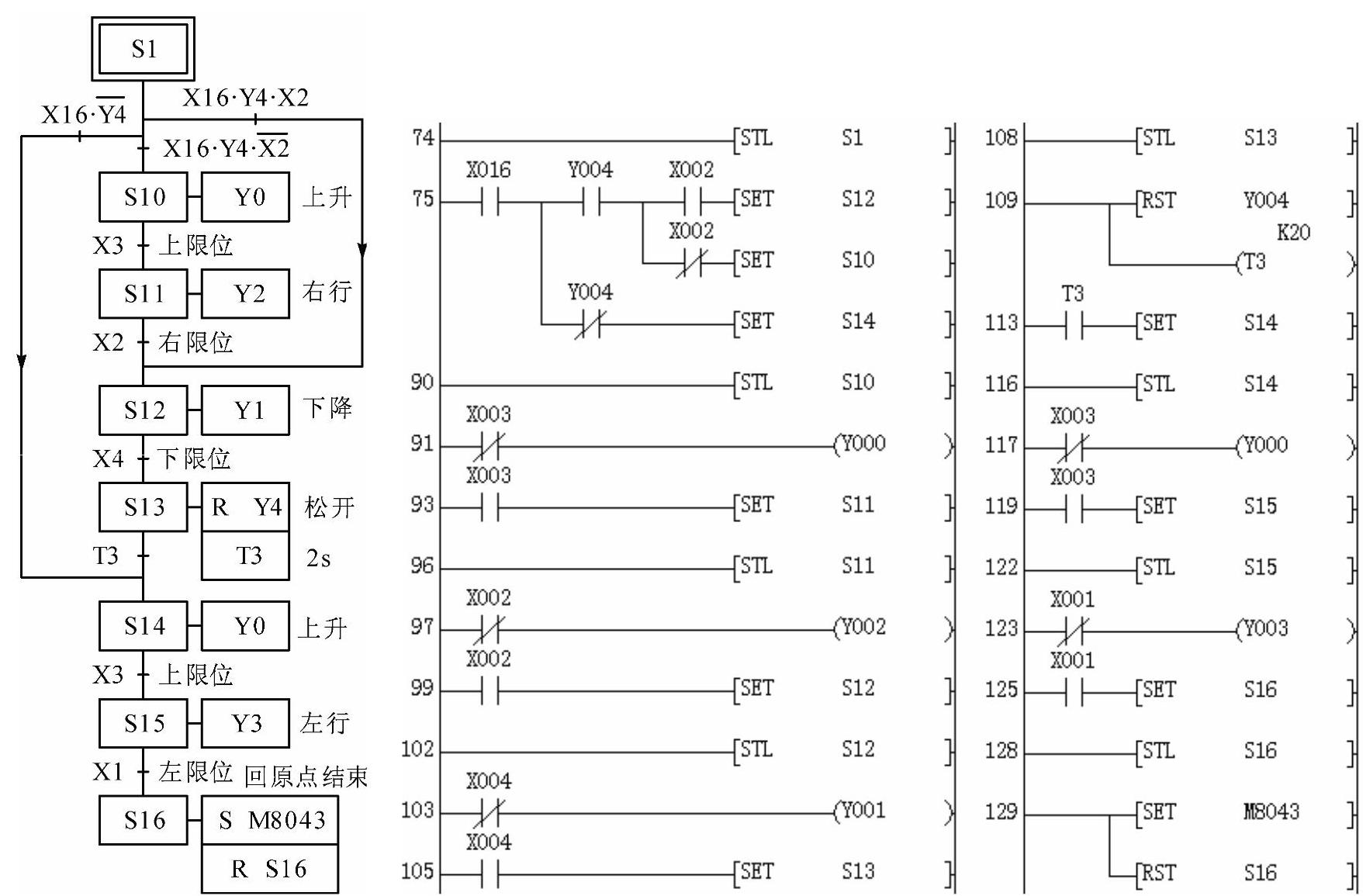
图5-58 使用STL指令回原点程序
回原点方式3种初始状态的调试方法和步骤可以参考项目“机械手控制1”回原点方式的调试方法。
(6)工作方式切换的调试
在自动程序运行时切换到手动模式,检查初始步S2和S20~S27中当时为ON的步是否变为OFF,手动方式的初始步S0是否变为ON。
在回原点方式时切换到非回原点方式,检查回原点方式的初始步S1和S10~S15中当时为ON的步是否变为OFF。
在连续方式切换到非连续方式,检查连续标志M8041是否被复位。
如果改变了当前选择的工作方式,则在“回原点完成”标志M8043变为ON之前,所有的输出继电器将变为OFF。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。