



1.程序结构
5.2.3节的专用钻床的顺序功能图描述的实际上是自动程序,除此之外,还有手动程序。在运行自动程序之前,首先应满足规定的初始条件。如果不满足,则可以切换到手动方式,用手动按钮分别独立操作各执行机构,使系统进入要求的初始状态。
因为STL指令不能用于子程序,随书光盘中的例程“专用钻床控制”没有采用子程序的形式,而是用条件跳转来切换自动程序和手动程序,程序结构如图5-31所示。自动开关X20为ON时,跳过手动程序,执行自动程序。X20为OFF时,跳过自动程序,执行手动程序。跳转指令“CJ P63”跳转到END指令处。程序中软元件的注释见图5-32。
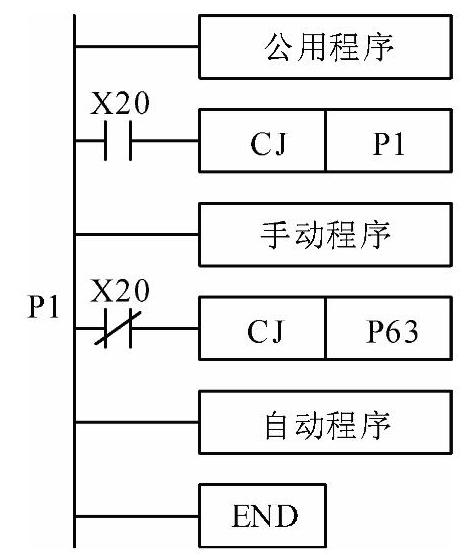
图5-31 专用钻床控制的程序结构

图5-32 注释表
图5-33是公用程序和手动程序。在手动方式(X20为OFF)和首次扫描时(M8002为ON),将顺序功能图中的非初始步对应的状态(S21~S29)批量复位,然后将初始步S0置位。上述操作主要是防止由自动方式切换到手动方式,然后又返回自动方式时,可能会出现同时有多个活动步的异常情况。
2.公用程序与手动程序
在手动方式,用手动按钮X10~X17分别独立控制大、小钻头的升降,工件的旋转、夹紧和松开。每对功能相反的输出继电器用对方的常闭触点实现互锁,用限位开关的常闭触点对钻头的升降限位。图中的“大钻升AN”是大钻头上升按钮的简称。“大钻升完”是大钻头上升到位、限位开关动作的简称。
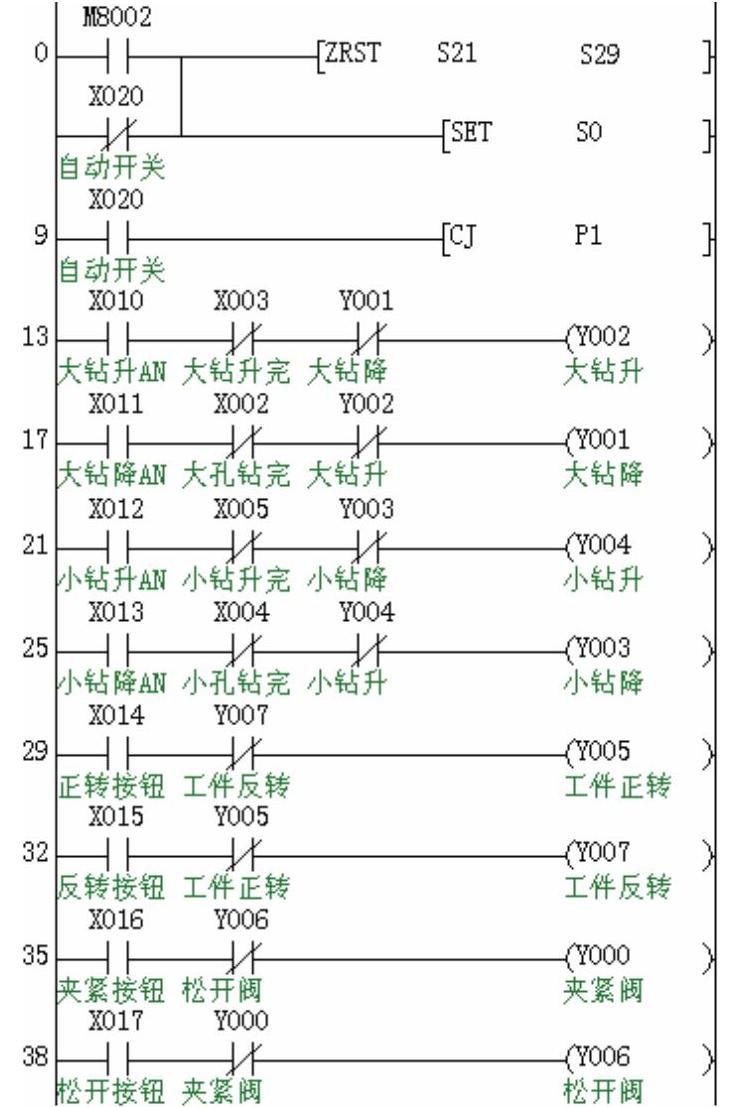
图5-33 公用程序与手动程序
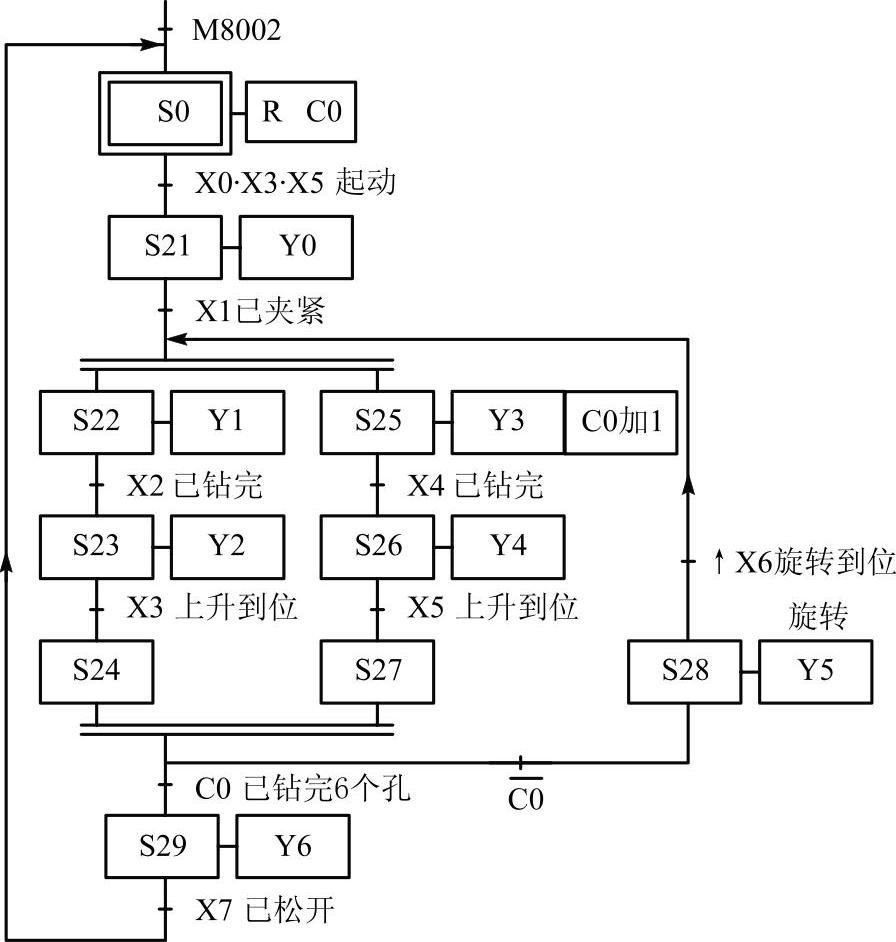
图5-34 专用钻床的顺序功能图
3.自动程序
图5-34重新给出了图5-19中专用钻床控制系统的顺序功能图,图5-35是用步进梯形指令编制的自动控制程序。顺序功能图中分别由S22~S24和S25~S27组成的两个单序列是并行工作的,设计梯形图时应保证这两个序列同时开始工作和同时结束,即两个序列的第一步S22和S25应同时变为活动步,两个序列的最后一步S24和S27应同时变为不活动步。
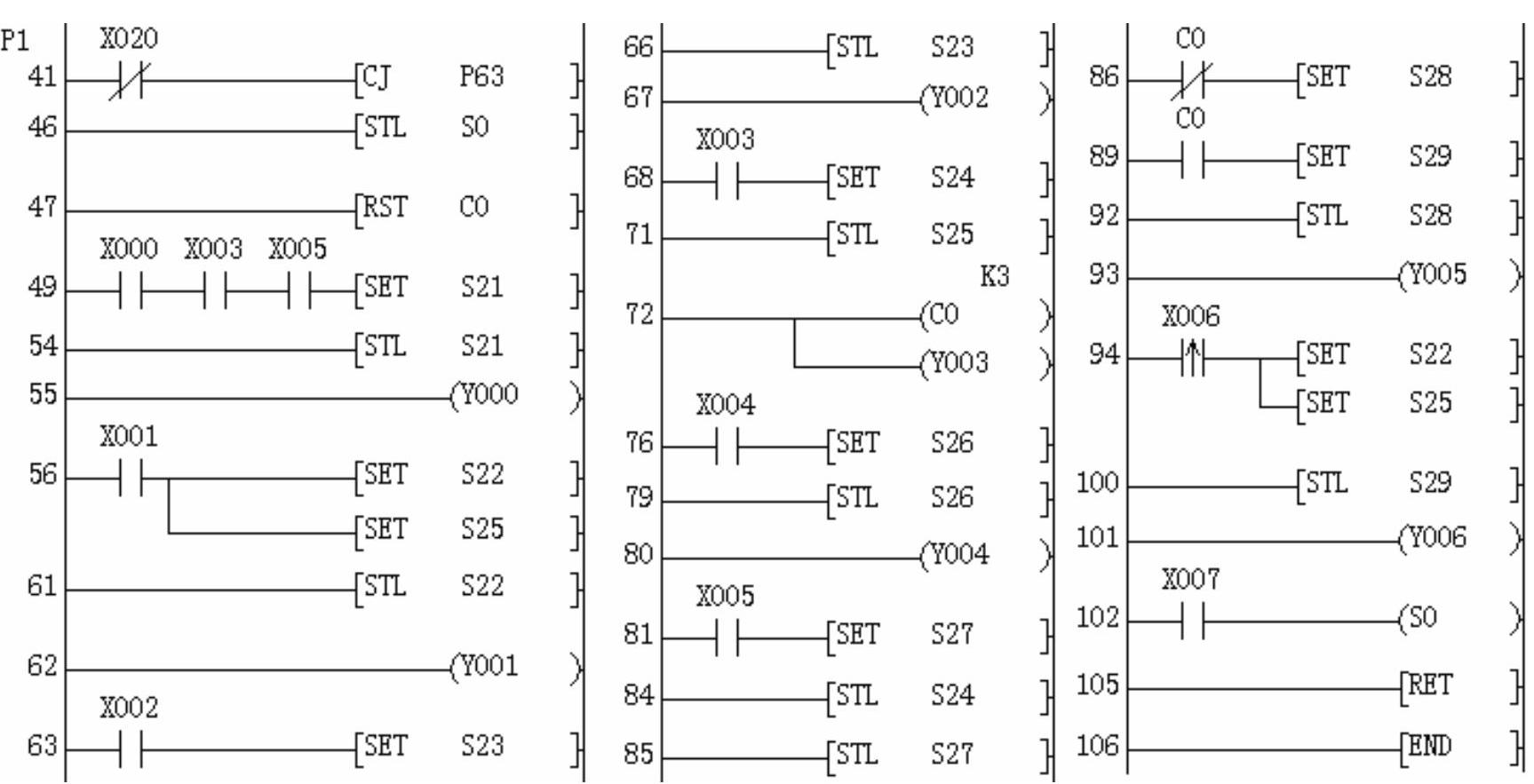
图5-35 专用钻床自动程序
并行序列的分支的处理是很简单的,在图5-34中,当步S21是活动步,并且转换条件X1为ON时,步S22和S25同时变为活动步,两个序列开始同时工作。在梯形图中,实际上是用S21的STL触点(对应于指令“STL S21”)和X1的常开触点组成的串联电路来控制对S22和S25的同时置位,系统程序将前级步S21变为不活动步。(https://www.xing528.com)
另一种情况是当步S28为活动步,并且在X6的上升沿时,步S22和S25也应同时变为活动步,两个序列开始同时工作。在梯形图中,用S28的STL触点(对应于指令“STL S28”)和X6的上升沿检测触点组成的串联电路来控制对S22和S25的同时置位。
图5-34中并行序列合并处的转换有两个前级步S24和S27,根据转换实现的基本规则,当它们均为活动步并且转换条件满足,将实现并行序列的合并。未钻完3对孔时,C0的常闭触点闭合,转换条件  满足,将转换到步S28,该转换的后续步S28变为活动步(S28被置位),系统程序自动地将该转换的前级步S24和S27同时变为不活动步。
满足,将转换到步S28,该转换的后续步S28变为活动步(S28被置位),系统程序自动地将该转换的前级步S24和S27同时变为不活动步。
图5-35的第84和第85步是两条连续的STL指令,对应于S24和S27串联的STL触点。它们和C0的常闭触点组成的串联电路使S28置位。
串联的STL触点(即连续的STL指令)的个数不能超过8个,换句话说,一个并行序列中的序列数不能超过8个。
钻完3对孔时,C0的常开触点闭合,转换条件C0满足,将转换到步S29。在梯形图中,用S24和S27的STL触点(即两条连续的STL指令)和C0的常开触点组成的串联电路,将步S29置位。
4.仿真实验
调试复杂的顺序功能图时,应对顺序功能图中的每一条支路、各种可能的进展路线,都应逐一检查,不能遗漏。特别要注意并行序列中各子序列的第1步(图5-34中的步S22和步S25)是否同时变为活动步,最后一步(图5-34中的步S24和步S27)是否同时变为不活动步。经过3次循环后,是否能进入步S29,最后返回初始步S0。发现问题后应及时修改程序,直到每一条进展路线上步的活动状态的顺序变化和输出点的变化都符合顺序功能图的规定。
将图5-33和图5-35中的程序输入到主程序,或打开随书光盘中的例程“专用钻床控制”,然后打开GX Simulator,启动软元件监视视图,生成X窗口、Y窗口和S窗口。
令自动开关X20为OFF,跳过自动程序,执行手动程序。
根据图5-33中的手动程序,观察是否可以用手动按钮X10~X17分别控制Y0~Y7。
令自动开关X20为ON,跳过手动程序,执行自动程序。
刚开始进入RUN模式时,初始步S0应为ON,C0的当前值应为0,令旋转到位限位开关X6、上限位开关X3和X5为ON。两次双击X窗口中的X0,模拟按下和松开起动按钮。观察是否能转换到步S21,Y0变为ON,工件被夹紧。
双击X1,模拟工件已被夹紧。观察是否能转换到步S22和S25,Y0变为OFF,Y1和Y3变为ON,大、小钻头开始钻孔。C0的当前值加1后变为1。
按顺序功能图分别两次双击X2、X3和X4、X5,模拟钻头运动的限位开关变为ON和OFF,观察是否能实现转换。
在S24和S27均为ON时,观察S28和Y5是否变为ON,S24和S27同时变为OFF。
进入步S28后,将X6置为OFF,模拟工作台开始旋转。再将X6置为ON,模拟旋转到位,限位开关X6动作。观察是否能返回步S22和步S25,C0的当前值加1后变为2。
按顺序功能图的要求模拟钻头运动的限位开关X2~X5的动作,直到转换到步28。两次双击X6,模拟旋转到位限位开关X6的断开和接通,观察是否能返回步S22和步S25,C0的当前值加1后变为设定值3。
按顺序功能图的要求模拟钻头运动的限位开关X2~X5的动作,并行序列的两个子序列分别转换到步S24和S27时,因为C0的常开触点闭合,观察是否能转换到步S29。两次双击X7,观察Y6是否变为OFF,夹紧装置松开,返回初始步S0。最后将表示已夹紧的X1置为OFF。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。