



1.步
顺序控制设计法最基本的思想是将系统的一个工作周期划分为若干个顺序相连的阶段,这些阶段称为步(Step),可以用软元件(例如辅助继电器M和状态S)来代表各步。步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的ON/OFF状态不变,但是相邻两步输出量总的状态是不同的,步的这种划分方法使代表各步的软元件的状态与各输出量的状态之间有着极为简单的逻辑关系。
运料矿车开始时停在右侧限位开关X1处(见图5-15),按下起动按钮X3,Y11变为ON,打开贮料斗的闸门,开始装料,同时用定时器T0定时。8s后定时时间到,Y11变为OFF,关闭贮料斗的闸门,Y12变为ON,开始左行。碰到左限位开关X2时Y12变为OFF,停止左行,Y13变为ON,开始卸料,同时用定时器T1定时。10s后定时时间到,Y13变为OFF,停止卸料,Y10变为ON,开始右行,碰到右限位开关X1后返回初始步,矿车停止运行。
根据Y10~Y13的ON/OFF状态的变化,显然一个工作周期可以分为装料、左行、卸料和右行这4步,另外还应设置等待起动的初始步,分别用M0~M4来代表这5步。图5-15左下侧是有关软元件的波形图(时序图),右边是描述该系统的顺序功能图,图中用矩形方框表示步,方框中可以用数字表示该步的编号,一般用代表该步的软元件的元件号作为步的编号,例如M0等,这样在根据顺序功能图设计梯形图时较为方便。
2.初始步与活动步
与系统的初始状态相对应的步称为初始步,初始状态一般是系统等待起动命令的相对静止的状态。初始步用双线方框表示,每一个顺序功能图至少应该有一个初始步。
当系统正处于某一步所在的阶段时,该步处于活动状态,称该步为“活动步”。步处于活动状态时,相应的动作被执行;处于不活动状态时,相应的非存储型动作被停止执行。
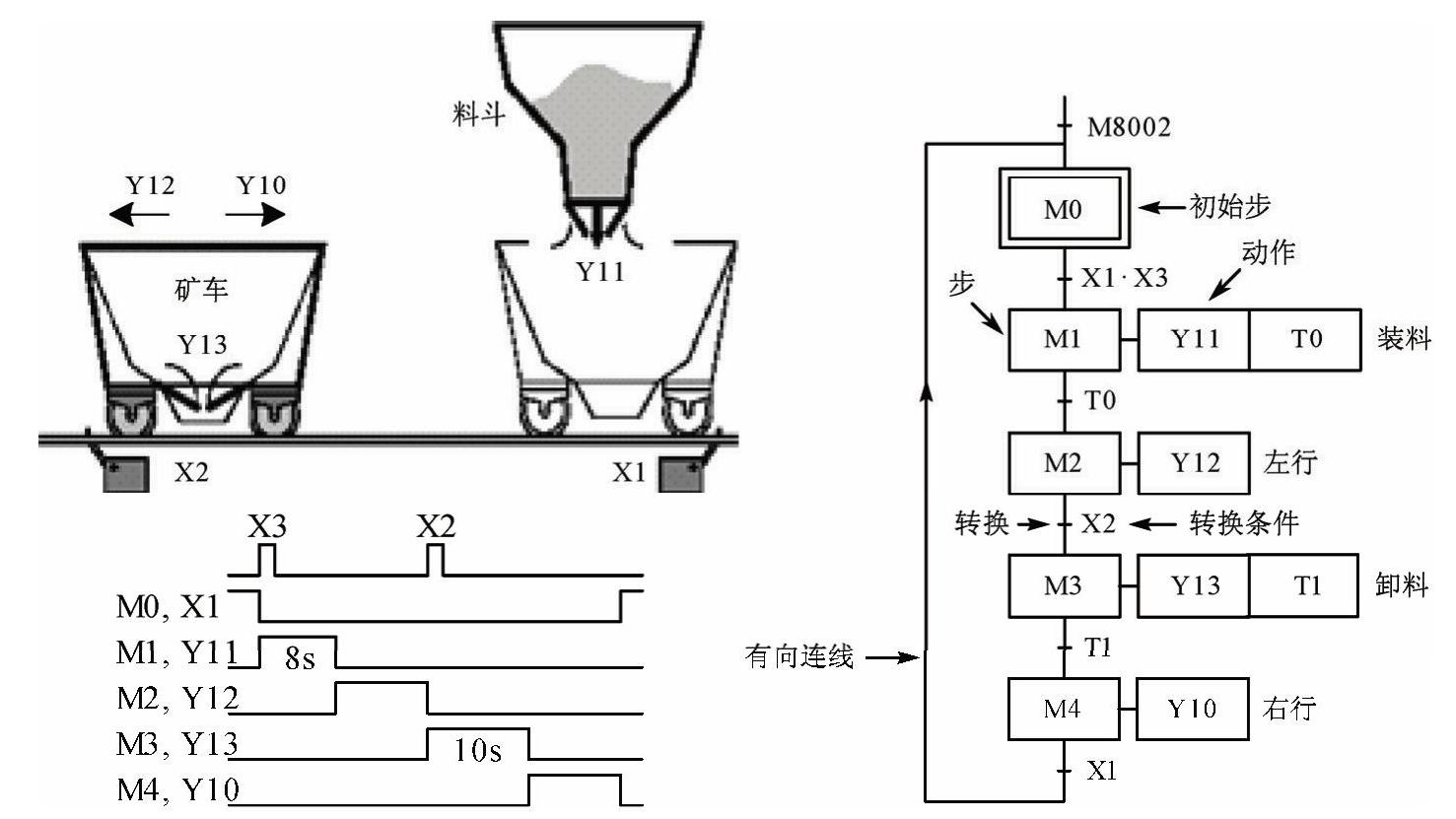
图5-15 运料矿车示意图与顺序功能图(https://www.xing528.com)
3.与步对应的动作或命令
可以将一个控制系统划分为被控系统和施控系统,例如在数控车床系统中,数控装置是施控系统,而车床是被控系统。对于被控系统,在某一步中要完成某些“动作”(action);对于施控系统,在某一步中则要向被控系统发出某些“命令”(command)。为了叙述方便,下面将命令或动作统称为动作,并用矩形框中的文字或符号表示,该矩形框应与相应的步的矩形框相连。如果某一步有几个动作,则可以用图5-16中的两种画法来表示,但是并不隐含这些动作之间的任何顺序。说明命令的语句应清楚地表明该命令是存储型的还是非存储型的。存储型的动作可以用表5-1中的S和R来表示。图5-39中的Y2在连续的5步M1~M5都应为ON,在Y2开始为ON的第一步M1的动作框内,用指令“S Y2”表示将Y2置位。该步变为不活动步后,Y2继续保持ON状态。在Y2为ON的最后一步M5的下一步M0的动作框内,用指令“R Y2”表示将Y2复位,复位后Y2变为OFF状态。
在图5-15中,定时器T0的线圈应在M1为活动步时“通电”,M1为不活动步时断电,从这个意义上来说,T0的线圈相当于步M1的一个非存储型的动作,所以将T0作为步M1的动作来处理。步M1下面的转换条件T0由在延时时间到达时闭合的T0的常开触点提供。因此动作框中的T0对应的是T0的线圈,转换条件T0对应的是T0的常开触点。
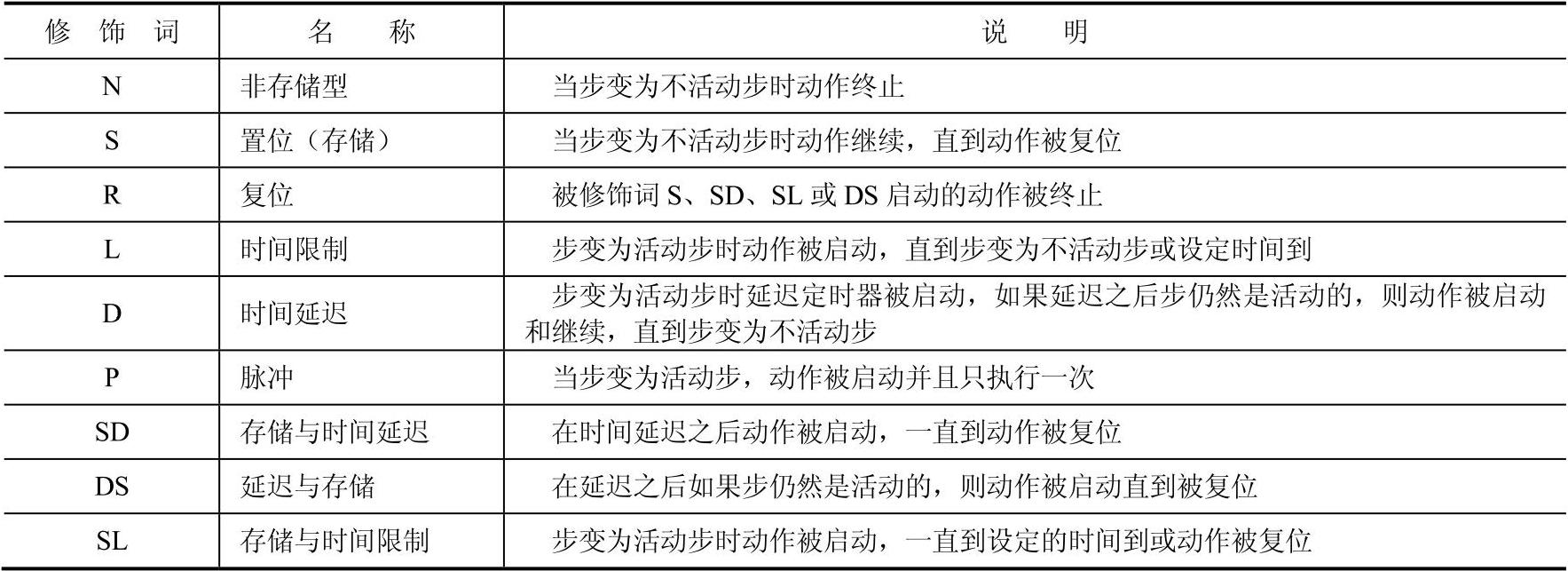
除了以上的基本结构之外,使用动作的修饰词(见表5-1),可以在一步中完成不同的动作。修饰词允许在不增加逻辑的情况下控制动作。例如,可以使用修饰词L来限制配料阀打开的时间。
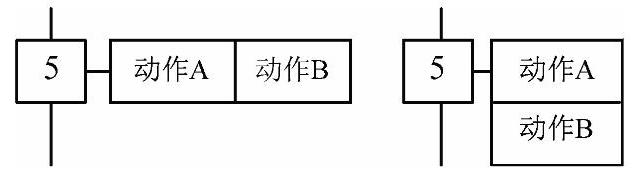
图5-16 多个动作的表示方法
表5-1 动作的修饰词
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。