



1.两条运输带的控制实验
两条运输带顺序相连(见图3-37),PLC通过Y0和Y1控制运输带的两台电动机。为了避免运送的物料在1号运输带上堆积,按下起动按钮X0,1号运输带开始运行,8s后2 号运输带自动起动(见图3-37中的波形图)。停机的顺序与起动的顺序刚好相反,即按了停车按钮X1后,先停2号运输带,8s后停1号运输带。
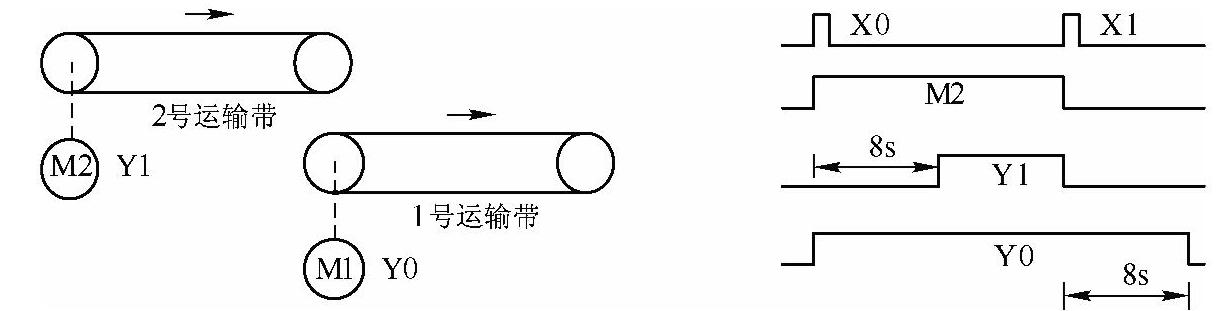
图3-37 运输带示意图与波形图
梯形图程序如图3-38所示(见随书光盘中的例程“运输带控制”),程序中设置了一个用起动按钮和停车按钮控制的辅助软元件M2,用它的常开触点控制定时器T0,以及控制T1等组成的断开延时定时器。
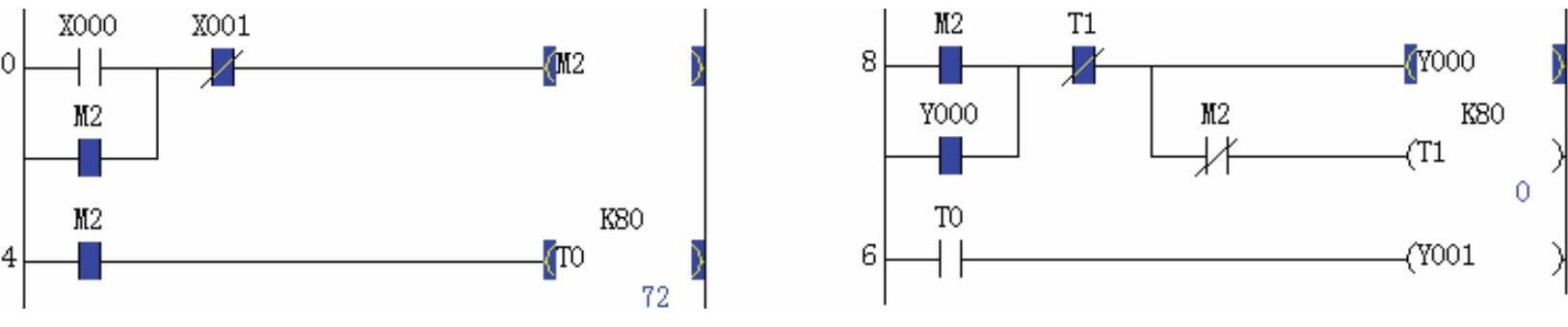
图3-38 运输带控制梯形图
T0的常开触点在X0的上升沿之后8s接通,在T0的线圈断电(M2的下降沿)时断开。综上所述,可以用T0的常开触点直接控制2号运输带Y1。
按下起动按钮X0,M2变为ON,控制1号运输带的Y0的线圈通电。按下停车按钮,M2变为OFF,T1开始定时,8s后T1的定时时间到,Y0的线圈断电。
仿真实验的步骤如下:
1)输入图3-38中的梯形图程序。
2)打开GX Simulator,启动软元件监视视图,生成X窗口、Y窗口和M窗口。
3)通过梯形图程序的状态进行监视。两次双击X窗口中的X0,模拟对起动按钮的点动操作。观察M2和Y0是否变为ON,T0是否开始定时。T0的定时时间到时,Y1是否变为ON。
4)两次双击X窗口中的X1,模拟对停车按钮的点动操作。观察M2和Y1是否变为OFF,T1是否开始定时。T1的定时时间到时,Y0是否变为OFF。
2.3条运输带控制的仿真实验
3条运输带顺序相连(见图3-39),PLC通过Y2~Y4控制3台运输带的电动机。为了避免运送的物料在1号和2号运输带上堆积,按下起动按钮X2,1号运输带开始运行,5s后2号运输带自动起动,再过5s后3号运输带自动起动。停机的顺序与起动的顺序刚好相反,即按了停车按钮X3后,3号运输带立即停机,5s后2号运输带停机,再过5s停1号运输带。(https://www.xing528.com)
图3-40中的波形图给出了程序设计的思路。程序中设置了一个用起动按钮X2和停车按钮X3控制的辅助继电器M1。用它的常开触点控制T2的线圈,用T2的常开触点控制T3的线圈,用T3的常开触点控制Y4的线圈。
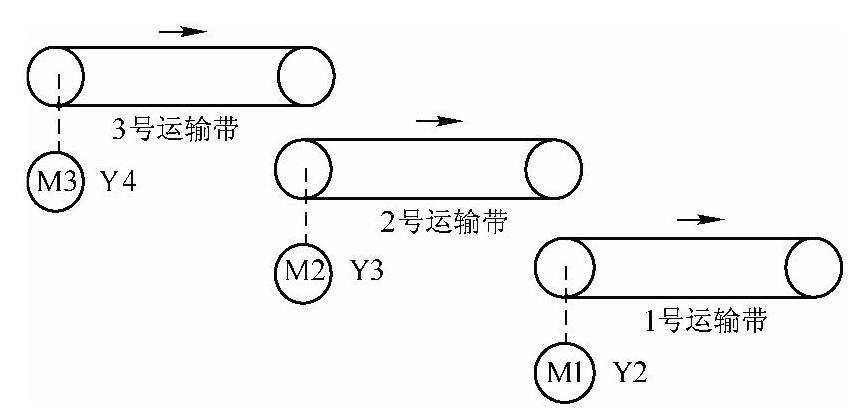
图3-39 运输带示意图
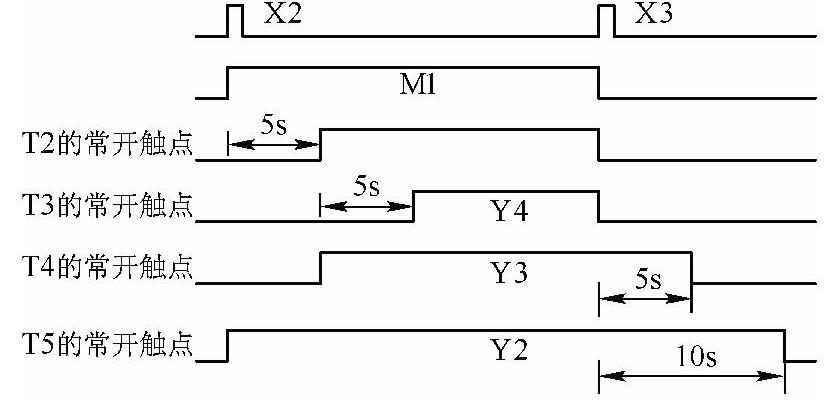
图3-40 波形图
此外,用M1作为输入信号,实现对Y2的10s断电延时控制。用T2的常开触点作为输入信号,实现对Y3的5s断电延时控制。
根据图3-40中的波形图,设计出的梯形图程序如图3-41所示。
仿真实验的步骤如下:
1)输入图3-41中的梯形图程序。
2)打开GX Simulator,启动软元件监视视图,生成X窗口、Y窗口和M窗口。
3)通过梯形图程序状态进行监视。两次双击X窗口中的X2,模拟对起动按钮的点动操作。观察M1和Y2是否变为ON,T2是否开始定时。T2的定时时间到时,T3是否开始定时,Y3是否变为ON。T3的定时时间到时,Y4是否变为ON。
4)两次双击X窗口中的X3,模拟对停车按钮的点动操作。观察M1和Y4是否变为OFF,T4和T5是否开始定时。T4的定时时间到时,Y3是否变为OFF。T5的定时时间到时,Y2是否变为OFF。
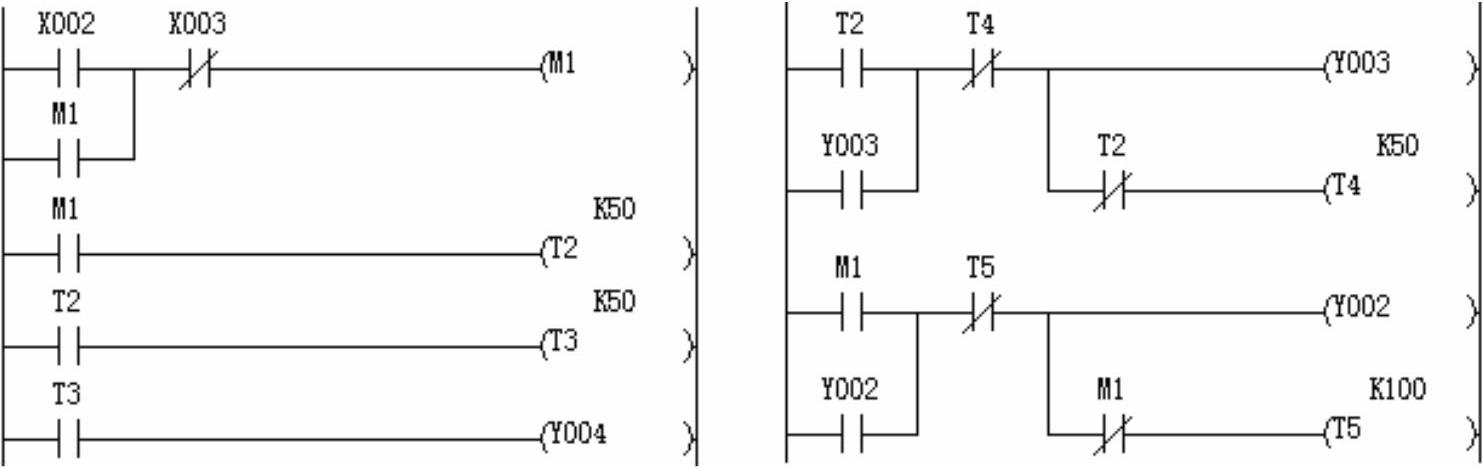
图3-41 运输带控制梯形图
为了简化调试过程,也可以只观察X和Y之间的关系。用鼠标产生起动按钮和停车按钮信号后,观察各输出继电器的状态变化是否符合波形图的要求。如果不符合,则再观察定时器的工作是否正常。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。