



有一小推车位置示意图如图5-8所示,小推车行走的方向由位置号和呼叫号相比较决定。
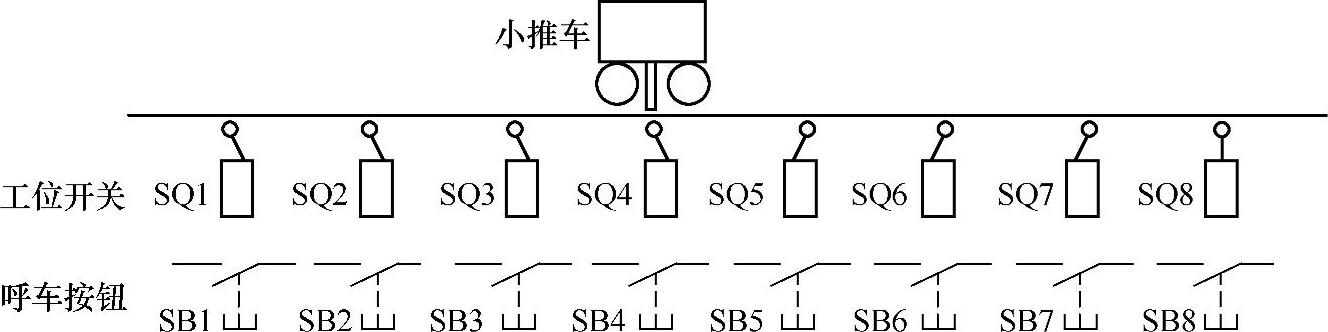
图5-8 小推车位置示意图
1.控制要求
1)小车所停位置号小于呼叫号时,小车右行至呼叫号处停车。
2)小车所停位置号大于呼叫号时,小车左行至呼叫号处停车。
3)小车所停位置号等于呼叫号时,小车原地不动。
4)具有左行、右行、原点不动指示;起动前有报警信号,报警5s后方可左行或右行。
5)小车具有正/反转点动运行功能。具有小车行走位置的7段数码管显示。
2.PLC的I/O配置、控制电路
PLC的I/O配置见表5-10,控制电路如图5-9所示。
表5-10 I/O接口分配
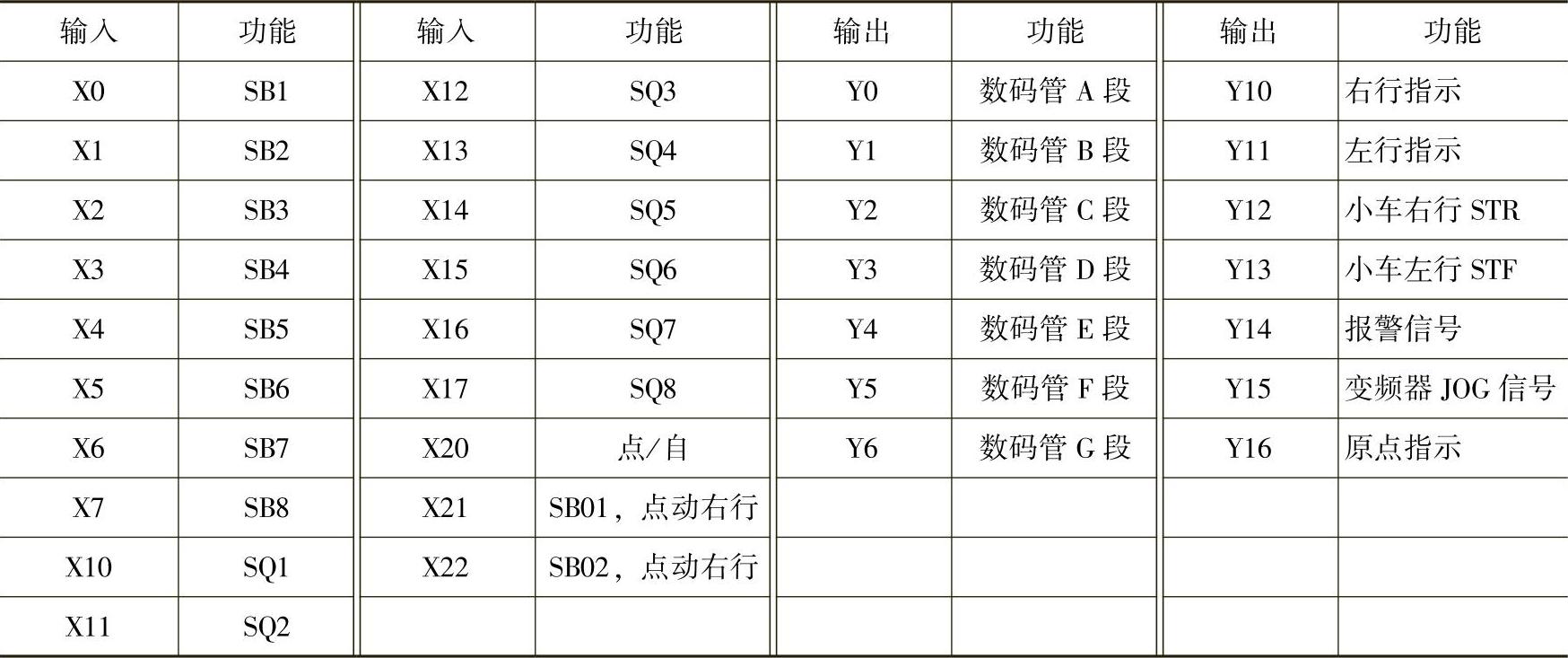
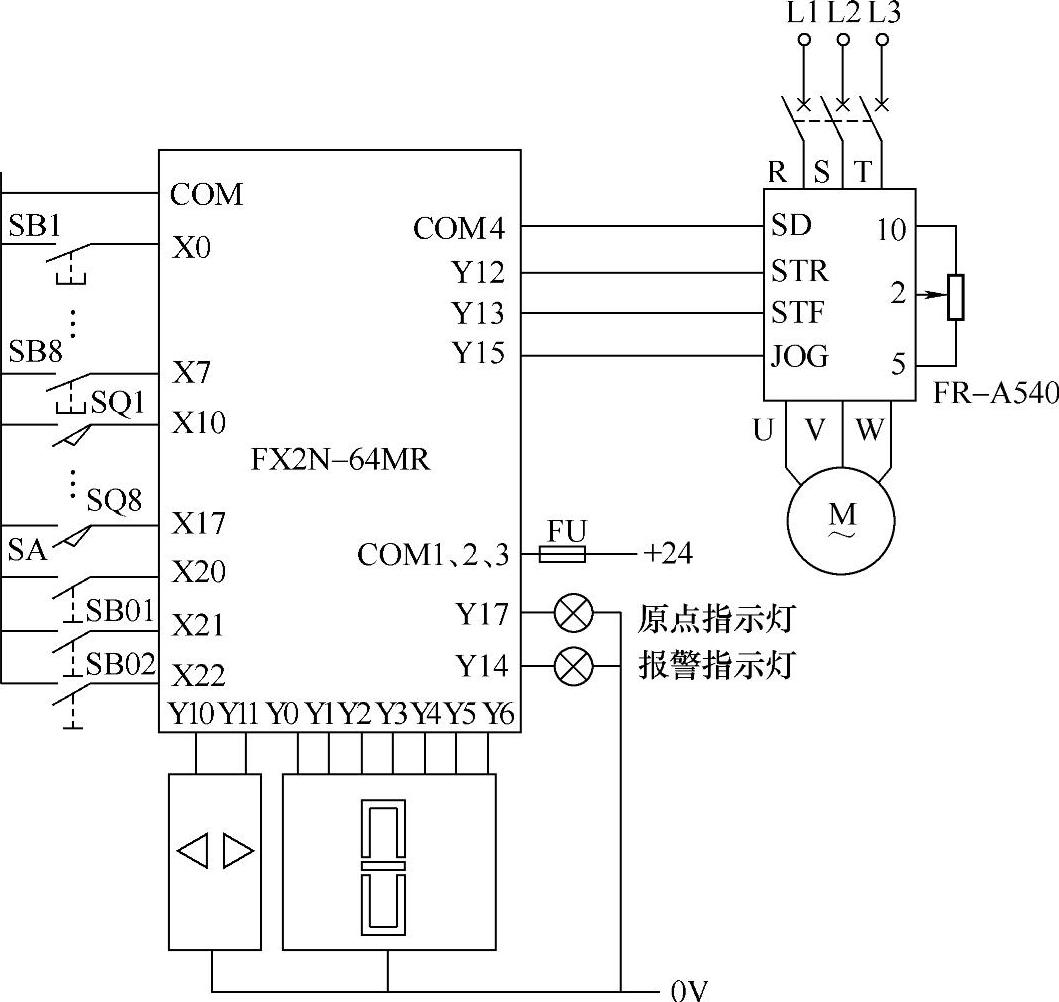
图5-98 站小推车自动控制电路
3.变频器参数设定
在PU模式下设定下列参数:
1)设定Pr.79(操作模式)为2,需要外接电位器。
2)设定Pr.7(加速时间)为5s。
3)设定Pr.8(减速时间)为4s。
4)设定Pr.15(点动频率)=10Hz。
5)设定Pr.16(点动加/减速时间)=2s。
4.梯形图
小推车自动控制参考程序如图5-10所示。
5.识读要点
(1)比较指令
比较指令(CMP)是将源操作数(S1)与(S2)的数据进行比较,并将结果送到目标操作数[D]中,比较结果有大于、等于、小于3种情况。CMP指令的使用说明如图5-11所示。
比较指令是一条3个操作数(2个源操作数、1个目标操作数)的指令。源操作数的数据作代数比较。当X0为ON时,执行CMP指令。若K100>C20的当前值时,M0接通;K100=C20的当前值时,M1接通;K100<C20的当前值时,M2接通。当X0为OFF时,CMP指令不执行,M0、M1、M2的状态保持不变。需要说明的是,目标操作数[D]是由3个软元件(M0、M1、M2)组成,梯形图中软元件标出的是首地址(M0),另外两个软元件(M1、M2)紧跟其后。
(2)编码指令
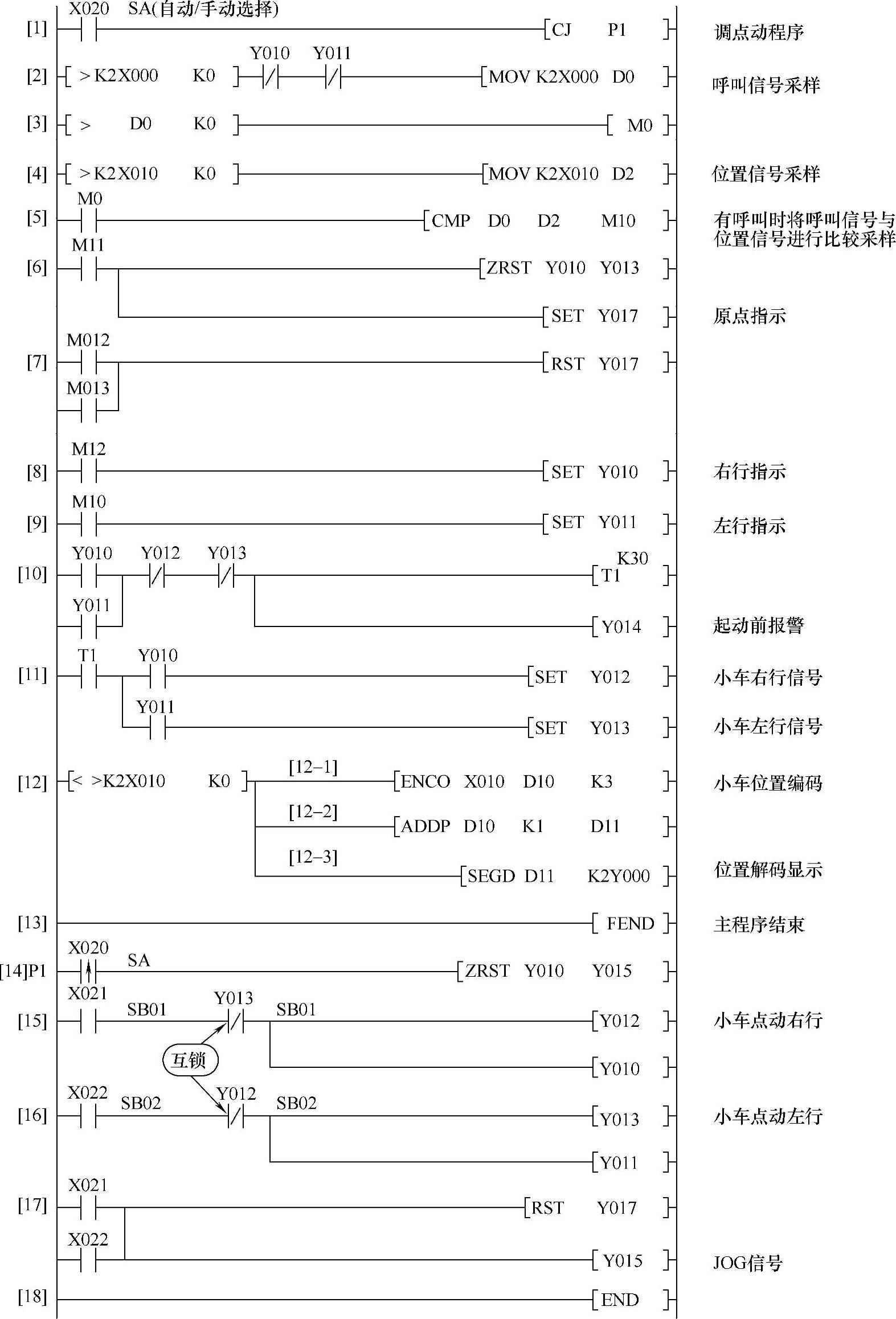
图5-10 小推车自动控制参考程序
编码指令(ENCO)的使用说明如图5-12所示。当[S]是位元件时,以源[S]为首地址,指令将最高置1的位号存放到目标[D]指定的元件中,[D]中数值的范围由n确定。在图5-12中,源元件的长度为2n(n=3,2n=8)位,即X10~X17,其最高置1位是X13,即第3位。将“3”对应的二进制数存放到D10的低3位中。(https://www.xing528.com)
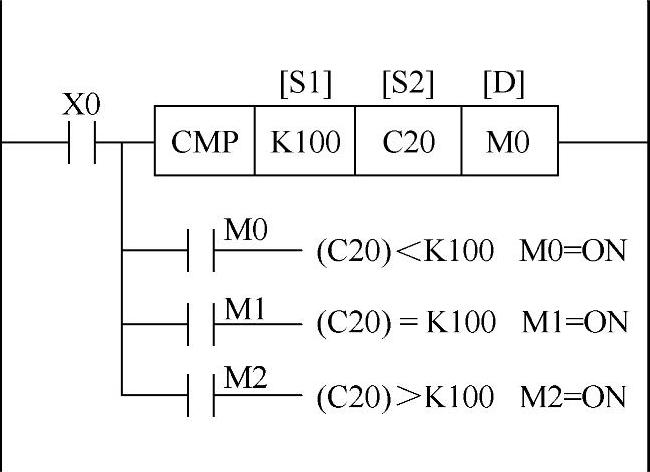
图5-11 CMP指令的使用说明
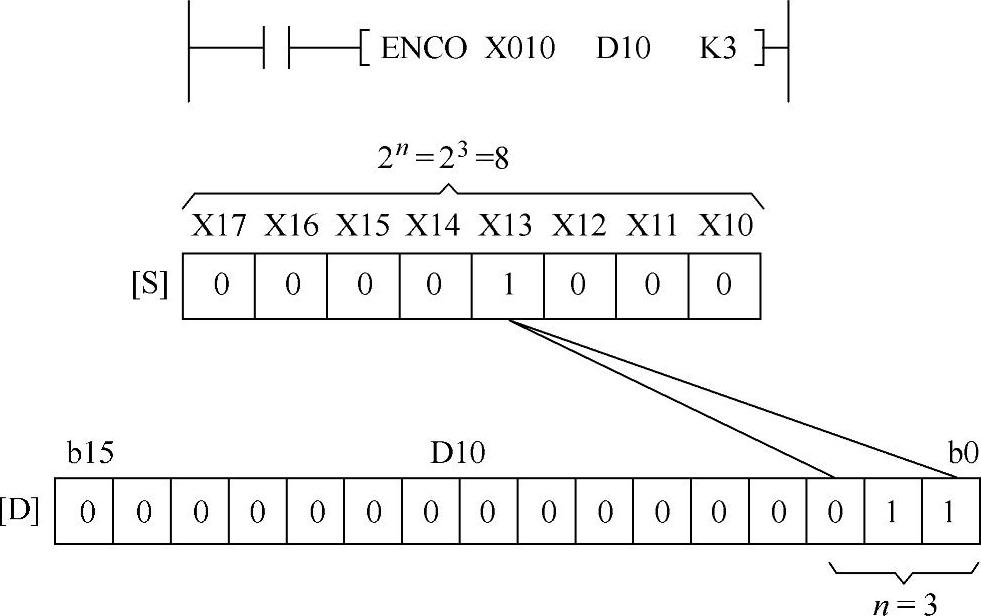
图5-12 ENCO指令功能说明
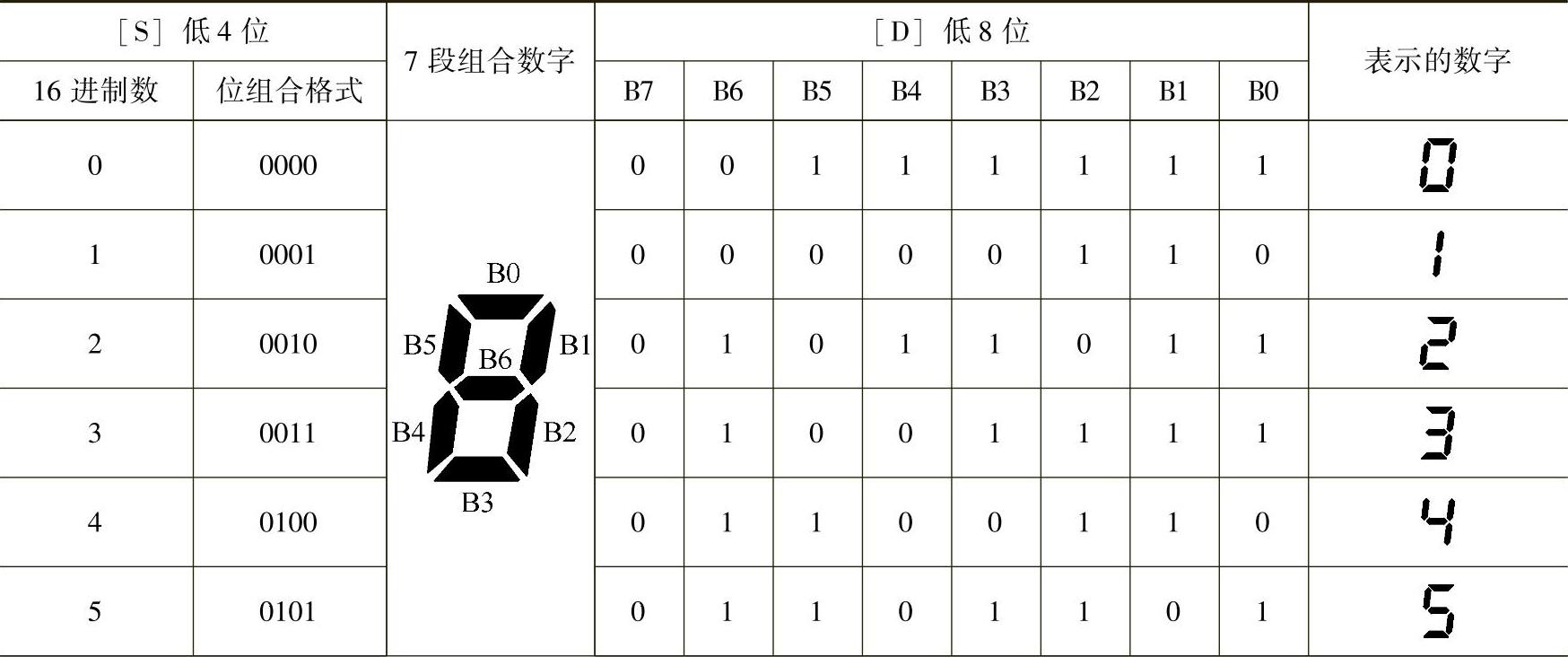
(3)7段译码指令
执行n段译码指令(SEGD)时,将[S]的低4位(只用低4位)所确定的十六制数(0~F,即0000~1111)译成7段码显示数据,存入[D]指定的低8位中,[D]的高8位保持不变。图5-13是SEGD指令使用说明,表5-11为7段译码表。
其中[S·]指定的软元件存储待显示数据,该元件低4位(只用低4位)存放的是待显示的十六进制数。译码后的7段码存于[D]指定元件的低8位中,高8位保持不变。译码表见表5-10,表中B0是位元件的起始号(如Y000)或字元件最低位。

图5-13 SEGD指令使用说明
表5-11 7段码译码表
(续)

6.电路工作过程
合上断路器QF,给变频器供电。
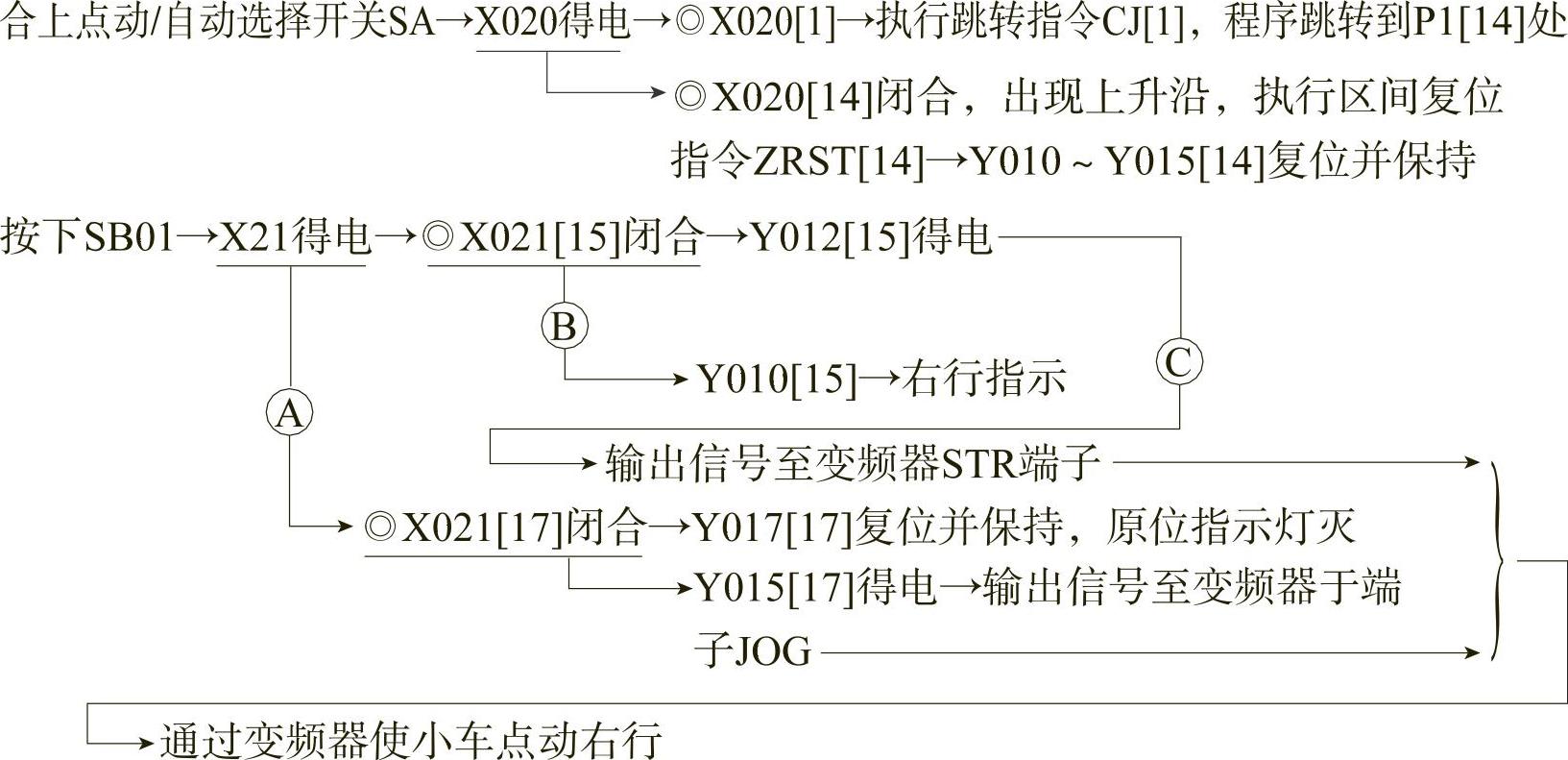
(1)点动运行
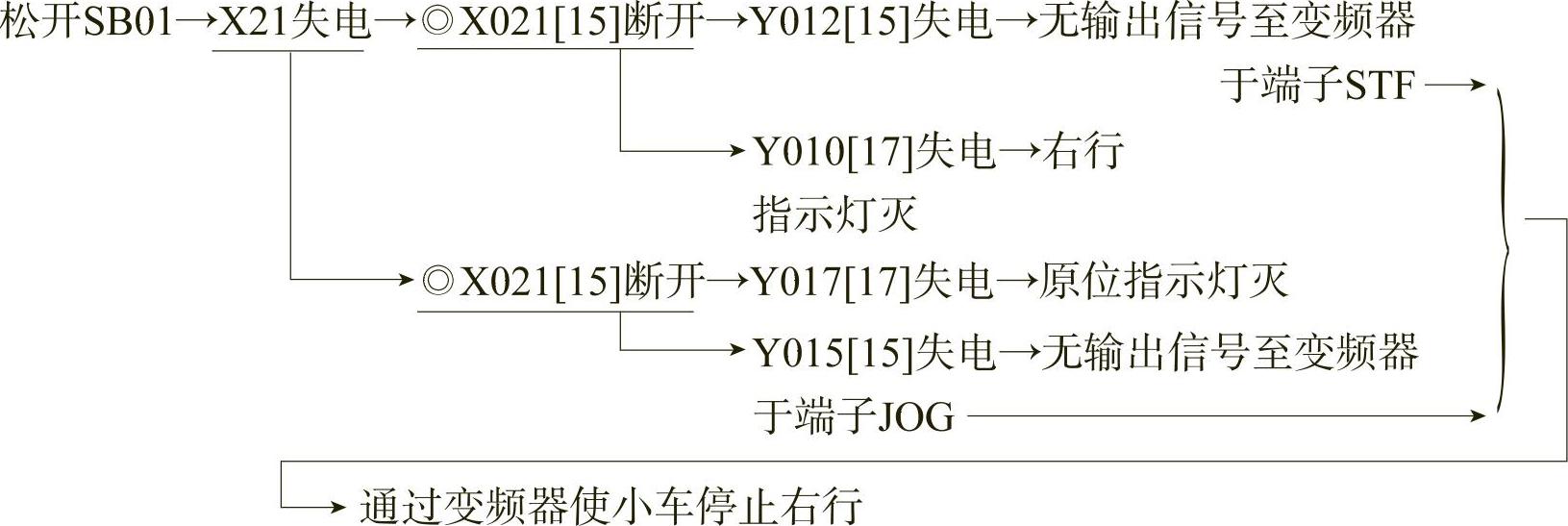
1)小车点动右行:
2)小车点动左行:按下SB02→X22得电,松开SB02→X22失电,通过Y13、Y11[16],可使小车点动左行,其工作过程与小车点动右行相同,不再赘述。
(2)自动运行
如图5-10所示,断开点动/自动选择开关SA→X020失电→◎X020[1]断开,不执行跳转指令。
1)当有呼叫信号时,按钮SB1~SB8中有的被按下,使K2X000(X0~X7)中相应的输入继电器得电,因此K2X000>K0[2],比较触头[2]闭合→执行MOV[2]指令,将K2X000写入D
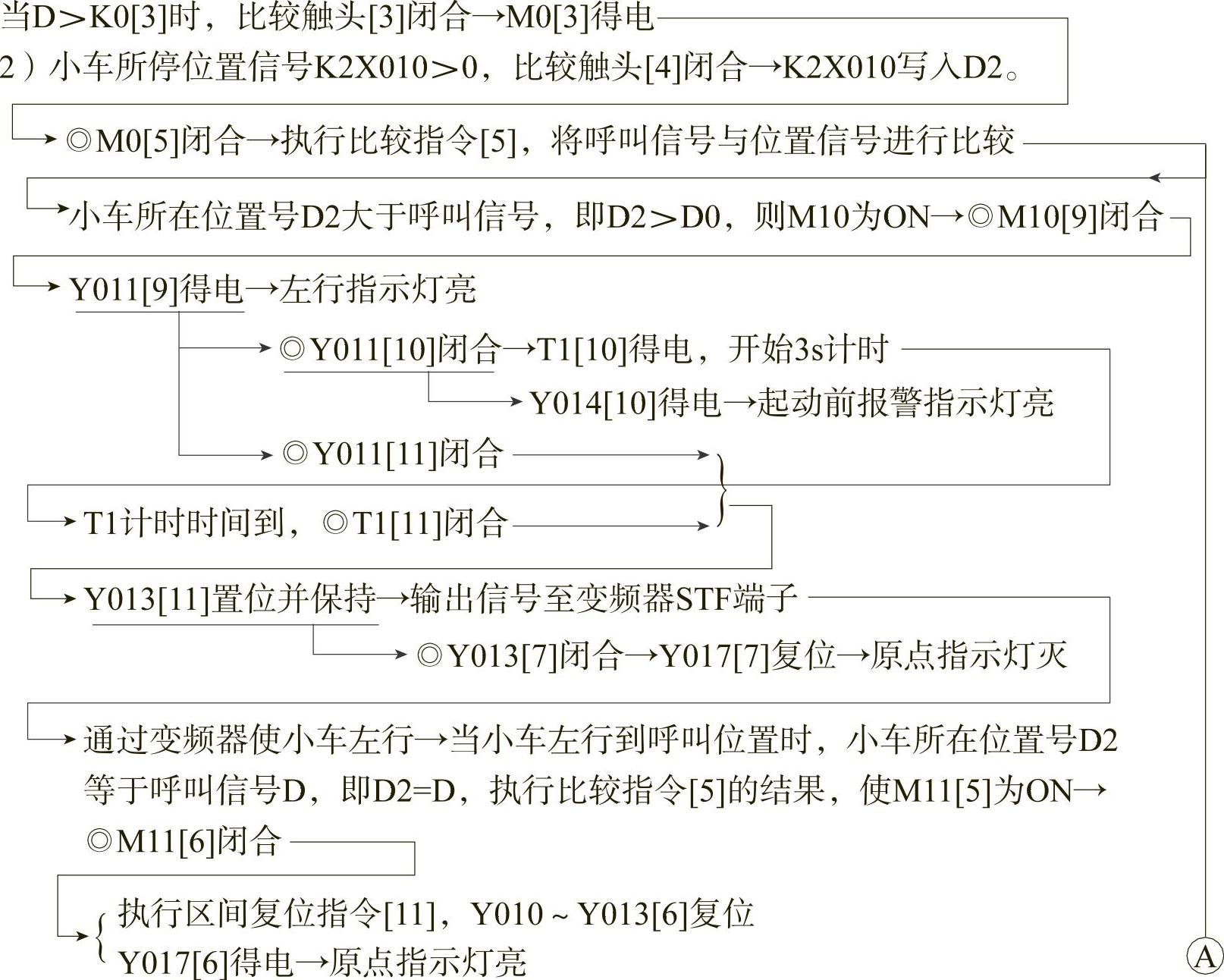
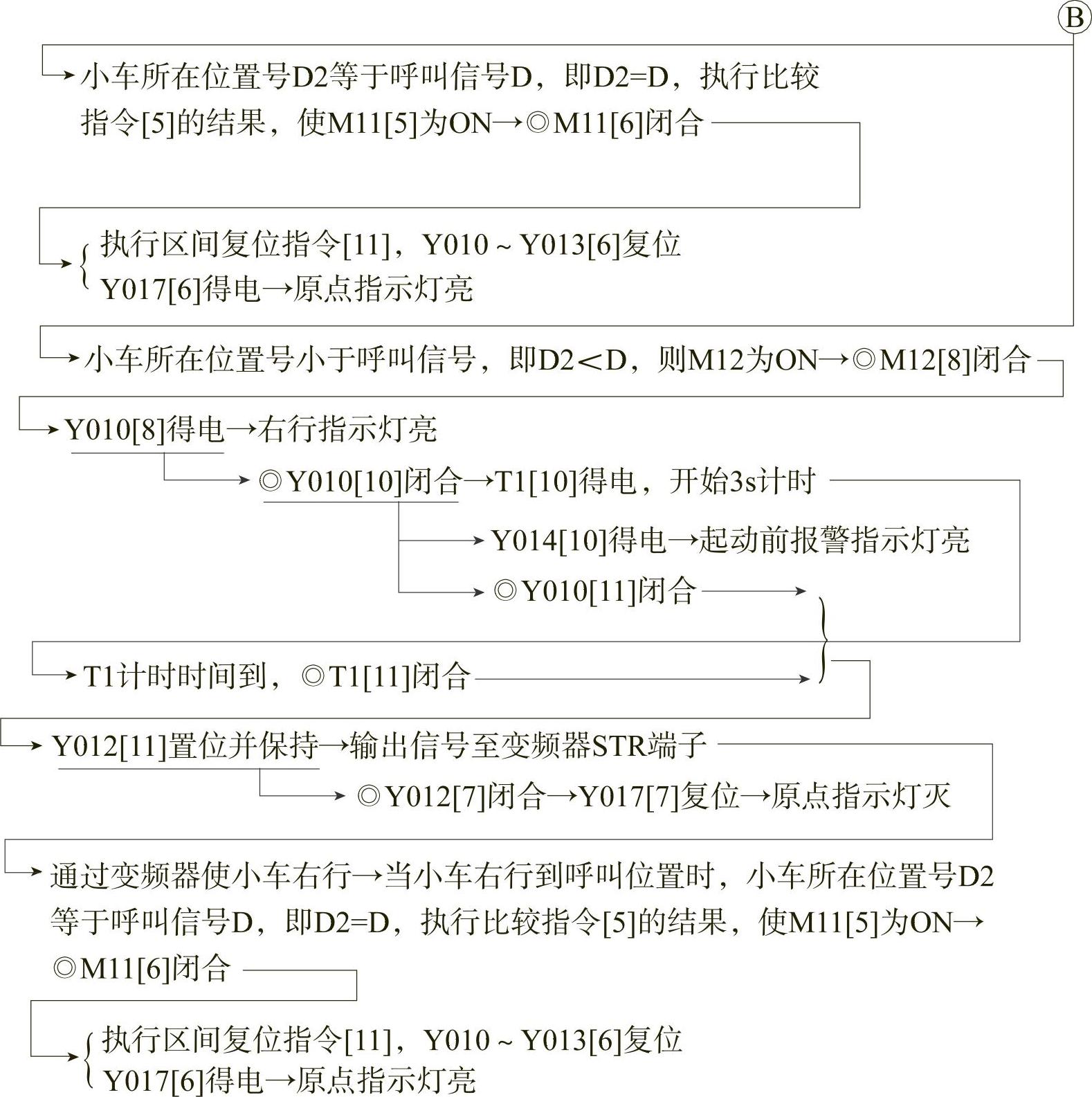
3)小车所在位置显示。当小车停留在位置3,则X012置“1”,因此K2X010≠K0,比较触头[12]闭合。
①执行编码指令[12-1],执行结果使D10=K2(见图5-12)。
②执行加1 ADDP指令[12-2]
由于小车停留位置的行程开关SQ1~SQ8与输入继电器的X10~X17端子连接,因此,在D10[12-1]中存放的位置参数为0~7。为此,执行加1指令,使D10中存放的位置号为1~8。
③执行SEGD指令[12-3],译码结果为D11=K2Y000=2#01001111,数码管显示“3”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。