



上述的风电机组的辨识方法的研究,只是经过了风电机组模型上的验证,为更接近实际的风电机组,我们基于风力发电系统国家重点实验室的3MW全功率拖动平台,建立一个能真实模拟风电机组运行的半物理仿真试验台,在所建立的半物理试验台上,能够对风电机组控制策略进行测试。
1.半物理试验台的架构
半物理试验台主要由四部分构成:数字化风力机模型(桨叶和风轮等)、风电机组(风机主控、变桨系统、变流器、电机、齿轮箱等)、整机拖动系统、变桨加载系统。结构框图如图10-50所示:
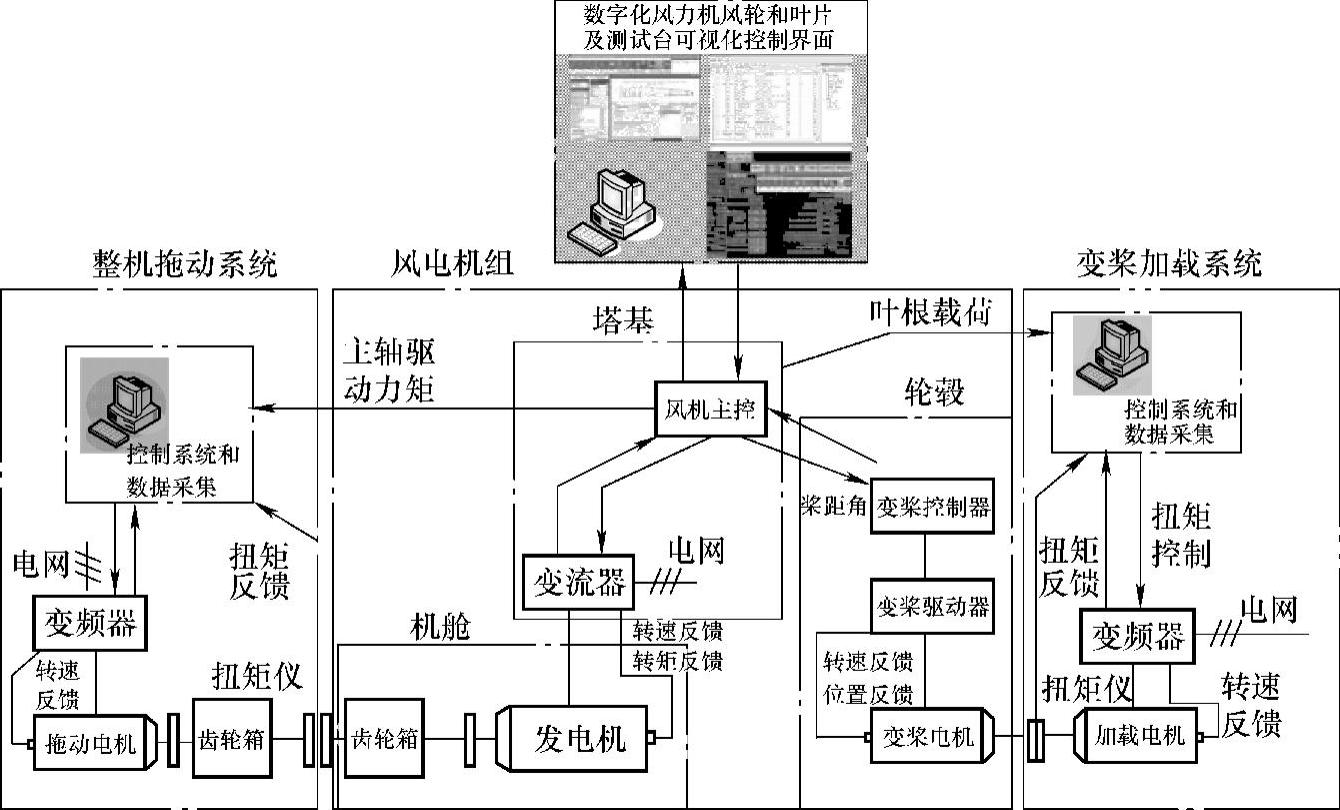
图10-50 风电机组半物理仿真试验台的示意图
在BLADED仿真软件中建立风力机的叶片和风轮的数字化模型,其余的部分都采用真实的风力机部件。通过BLADED Hardware Test软件,实现风力机的数字化模型和真实风力机之间的数据实时交换。仿真时,在BLADED中生成模拟风模型,运行风力机数字化模型,可以得到一定风速下不同桨距角时风力机的驱动力矩和变桨载荷的数据,通过Hardware Test及主控系统IO口,将模拟仿真所得到的风力机驱动力矩和变桨的阻力矩分别输送到整机拖动系统和变桨加载系统的控制系统中,风电机组的发电机在拖动系统的作用下运转,主控系统控制整个风电机组,当达到并网转速后风电机组并网发电。风电机组实物部分的各种状态量(功率、桨距角等)也会通过Hardware Test及主控系统实时的传送到BLADED中风力机模型中,根据风速和风电机组的桨距角在BLADED中实时仿真出风轮所能捕获到得风能以及叶片的载荷情况,并实时的加载到拖动系统和加载平台上,这样数字化部分和实物部分就形成了一个闭环的系统。
2.半物理试验台各部分介绍
(1)半物理台的数字化风力机模型
在BLADED中建立风、桨叶和风轮的模型,通过Hardware Test软件实现BLADED与主控之间数据的实时交换。由于BLADED不具有实时显示数据的功能,无法很好地将数据显示出来,因此采用VC++编写数据显示界面,通过动态链接库dll文件来实现数据的交换。在显示界面中风速、桨距角、转速、转矩、功率等风力机运行参数均可以看到。而且在界面上还可以对风速,以及运行工况进行设定。半物理试验台的信息流如图10-51所示。
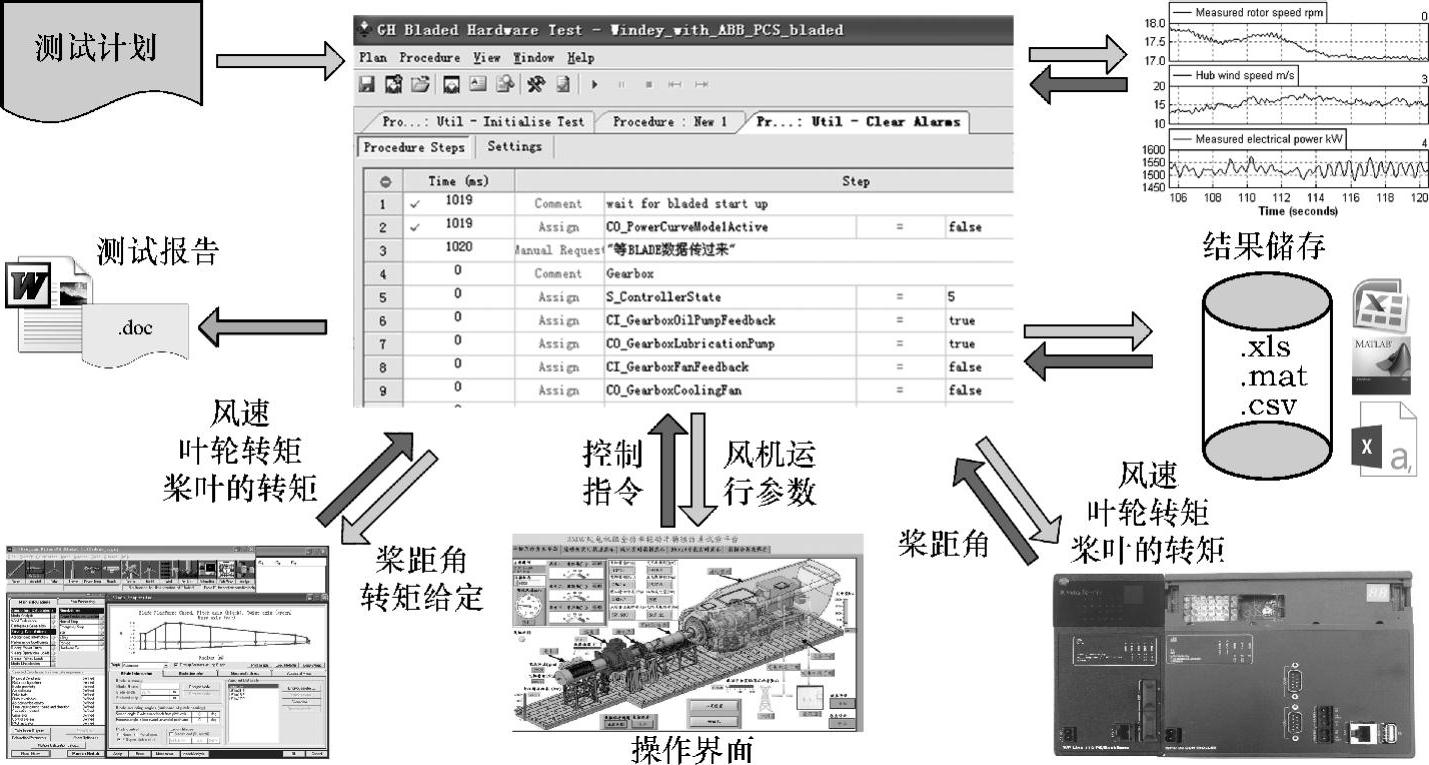
图10-51 半物理试验台的信息流图
(2)拖动系统
拖动系统主要由驱动电机、整流柜、驱动柜、S7控制器、工控机、操作柜、扭矩仪等组成。整个拖动系统的示意图如图10-52所示。拖动系统主要用来模拟风轮吸收的风能,来拖动风电机组。根据不同的实验要求,拖动系统可以转速控制也可以转矩控制。转矩控制既可以是恒转矩控制也可以根据数字风轮模拟仿真出来的风轮驱动力矩来进行拖动测试。可以对风电机组的发电机、变流器、齿箱等部件的性能进行测试。(https://www.xing528.com)
(3)变桨加载系统
变桨加载系统主要由加载电机、变频器、控制系统和数据采集系统;变桨加载系统的示意图如图10-53所示。
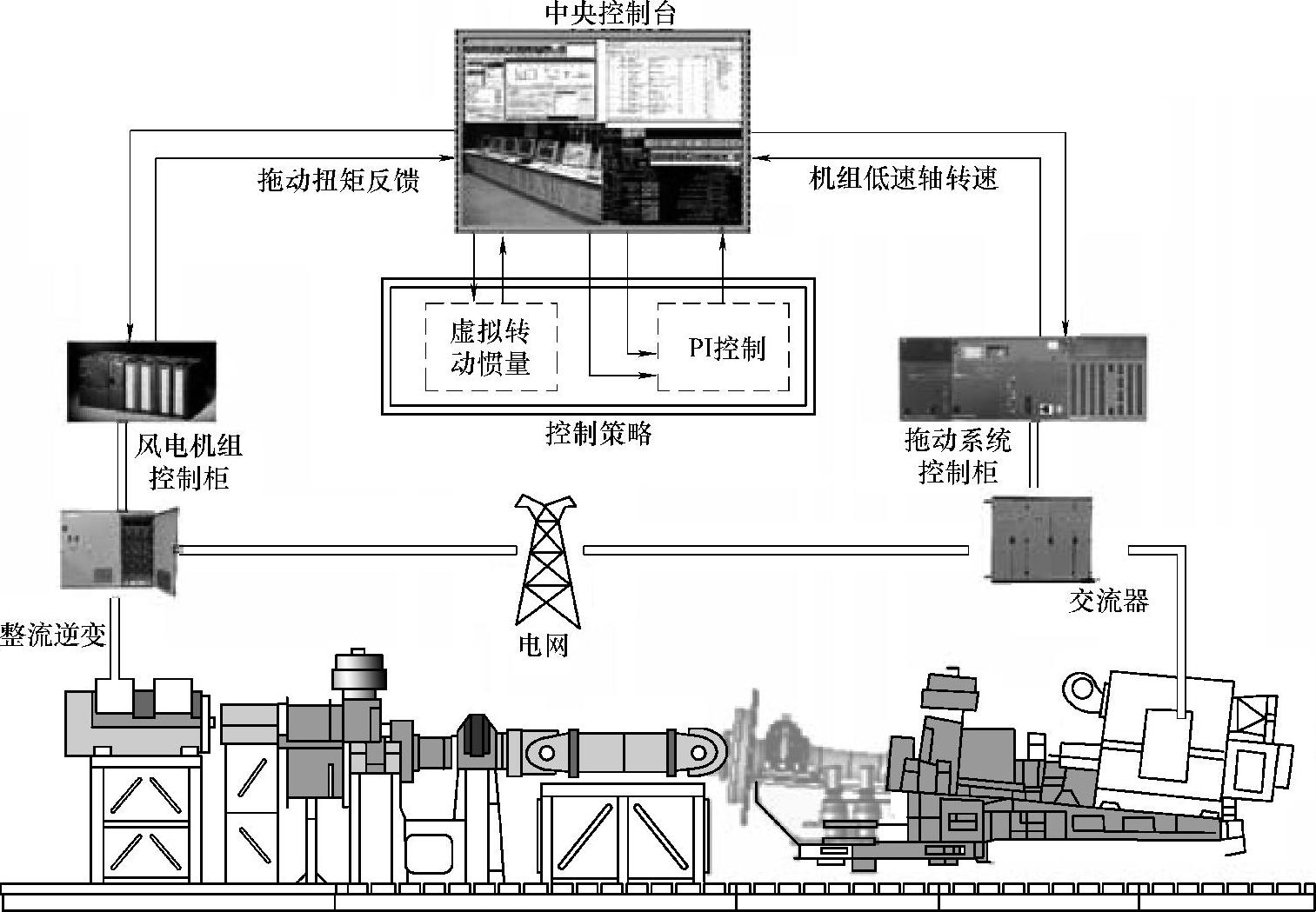
图10-52 拖动系统的示意图
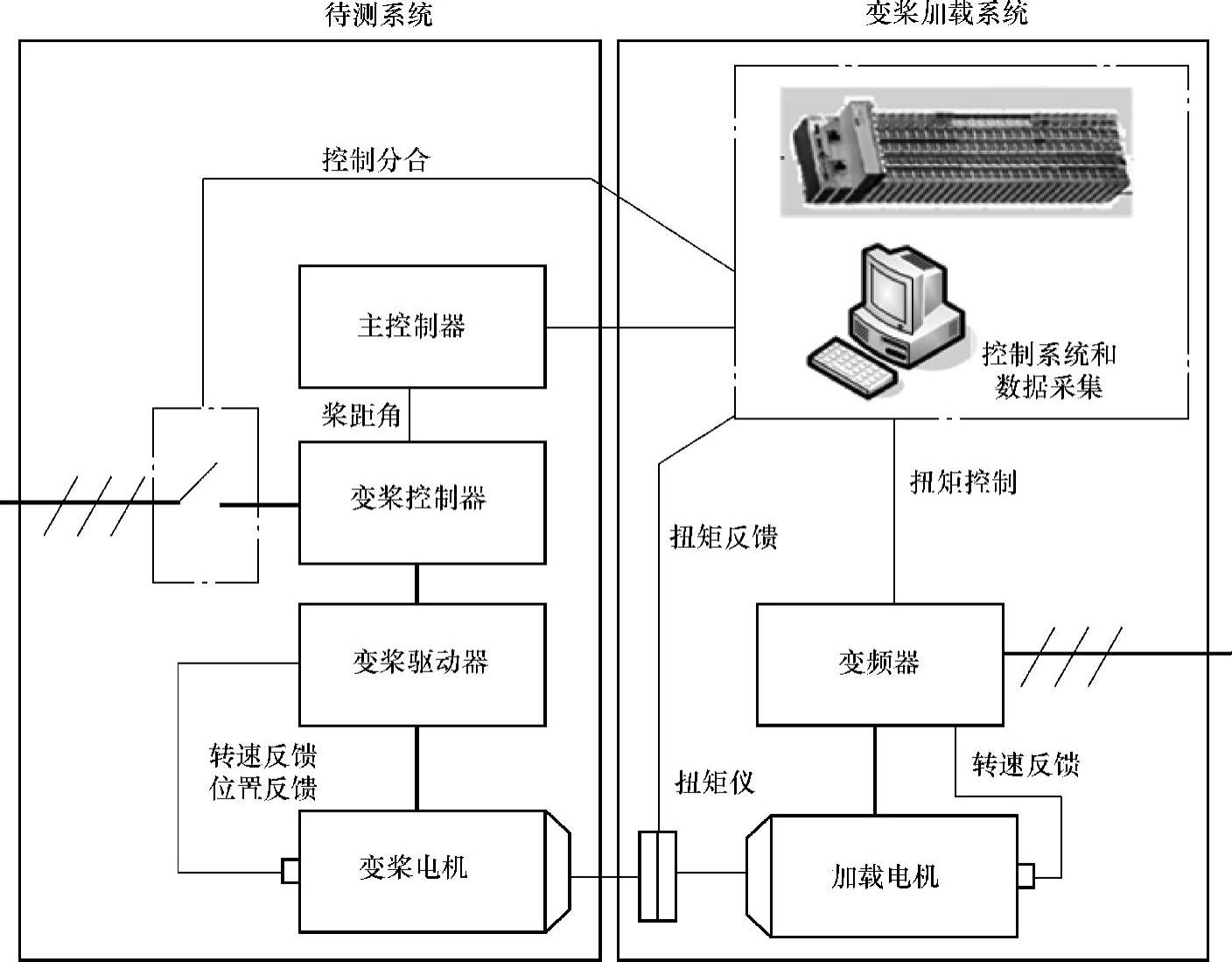
图10-53 变桨加载系统示意图
加载系统的加载方式如下:
1)恒扭矩加载:在恒扭矩加载时,变桨系统的电机要进行正转、反转、快转、慢转以及正弦位置指令和方波位置指令的加载测试。
2)变扭矩加载:可以将所需要的载荷以数据-时间表单方式导入,然后控制加载系统按照所需的载荷进行加载。
可以接收实时载荷数据,动态控制加载台的输出载荷。
在整机半物理仿真时,通过该方式将仿真软件中得到的变桨驱动力矩输入到加载系统,对变桨系统进行加载。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。