



根据采集的试验数据,截取五个工作点数据分别辨识当地线性模型。这里我们可以采用直接法和两步法进行辨识,且均可以结合ADALINE框架。当采用直接法时,基于ADALINE方法即如图10-43所示;而当采用两步法时,其原理在于第一步估计从激励信号r1到开环对象输入u的传递函数T0(q-1),然后利用该传递函数,第二步基于激励信号r1产生无信号扰动的开环对象输入估计 ,再辨识
,再辨识 到输出y的模型。则可利用的结构框架进行改良扩展,可得到图10-42所示的结构框图。
到输出y的模型。则可利用的结构框架进行改良扩展,可得到图10-42所示的结构框图。
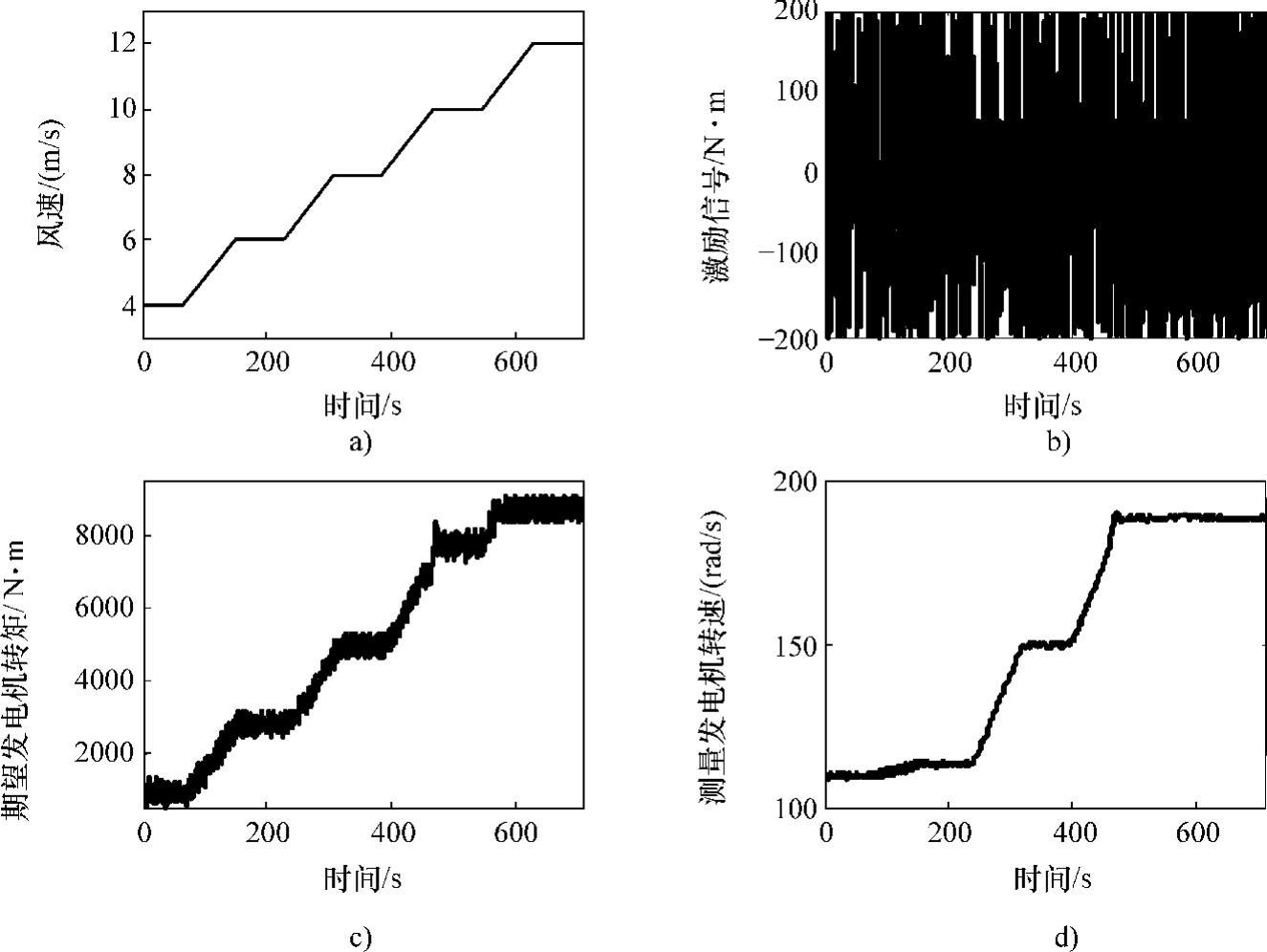
图10-41 全局测试试验数据
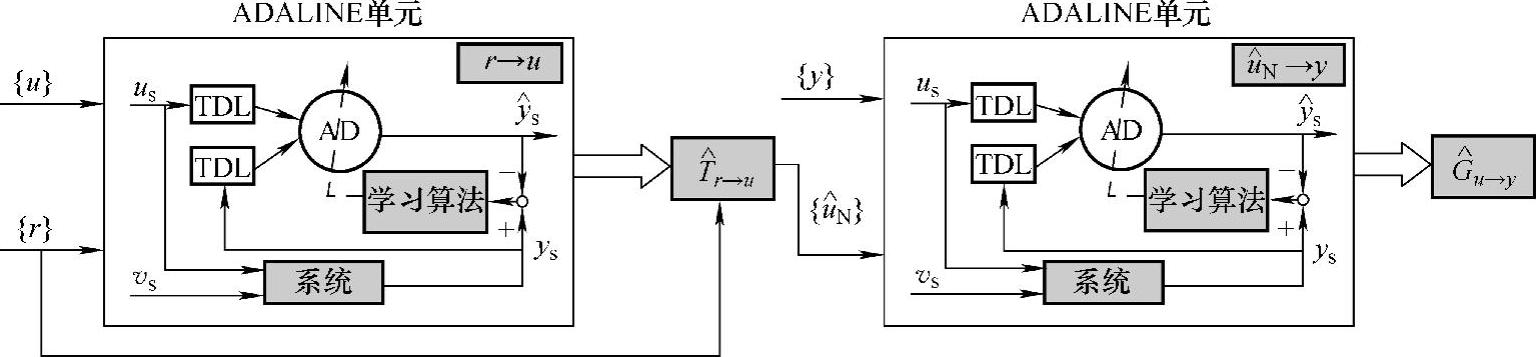
图10-42 基于ADALINE技术的两步法结构框图
以第二个工作点(6m/s)为例,采用基于ADALINE技术的方法进行辨识时,对应的结果如图10-43所示。可以看到,学习率也跟随训练过程调整直到适应系统,而从输出和误差来看显示出了较好的辨识效果。(https://www.xing528.com)
由于采用两步法进行当地工作点辨识需要两步估计和一步仿真输出,若利用ADALINE计算不仅加大了运算量,且收敛速度较慢,因此可以直接进行运算。最终获取的五个当地工作点伯德图比较如图10-44所示。可以看得除了在12m/s风速情况下,其他风速段的模型辨识结果基本吻合,这是因为12m/s附近为中低风速过渡阶段,转矩控制器与桨距控制器会进行耦合,产生一个复杂的联合控制区域,导致辨识和控制异常困难,因此结果性能较差;而其他工作点除4m/s外,低频段特性两步法均比直接法要好,且其他频段特性差别不大,因此可以采用两步法辨识所得的当地线性模型进行进一步插值。
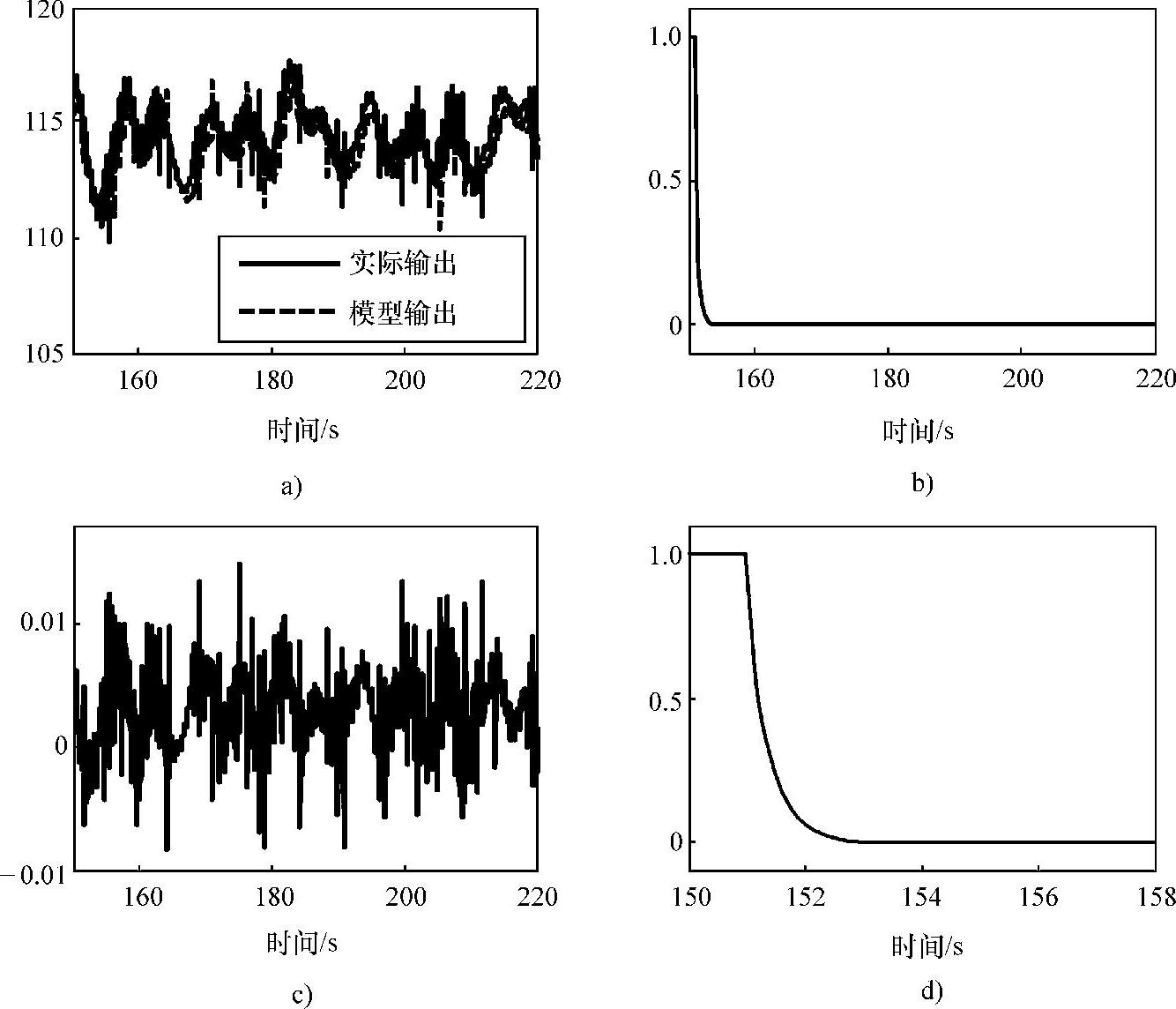
图10-43 基于ADALINE方法辨识结果(风速6m/s)
a)输出比较 b)学习率η变化轨线 c)模型相对误差 d)学习率η变化轨线(前200次)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。