



基于LPV的系统辨识方法可分为两步:第一步是当地线性模型的获取;第二步是基于插值函数的全局LPV模型获取。在获取工作点pk(k=1,2,…,m)的当地线性模型时,需依次对各对应工作点采集的数据进行辨识处理,m个工作点就需要进行m次计算,倘若所要辨识的当地模型个数较多,重复性工作量将会较大;而在全局LPV模型获取阶段,最终的θ估计问题在直接进行式(10-29)计算的时候,若数据量较为庞大、三次样条的阶数较高,则会产生病态或者难以求解的问题。可采用一种基于ADALINE技术的系统辨识方法。
1.基于ADALINE技术对稳定工作点进行辨识
在稳定工作点pk(k=1,2,…,m)上,将系统模型表达式(10-23)展开即为

此时,要估计的模型参数即为ai,bj(1≤i≤na,1≤j≤nb,na≤nb),采用图10-7所示的框架。
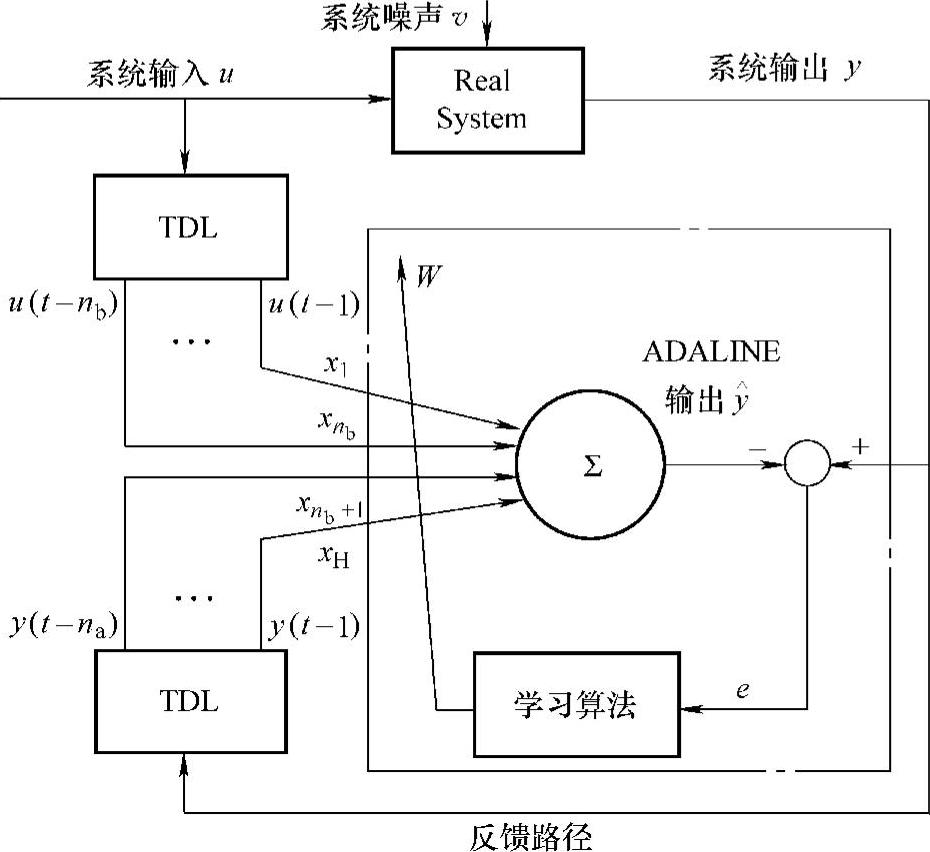
图10-7 基于ADALINE技术辨识稳定工作点的方法结构示意图
此时,点画线框为一个ADALINE模块,其输出为输入的线性组合。当输入端加入串联TDL(单位延迟控制器)的系统输入、输出信号后,则有新的ADA-LINE输入为

这里t为迭代指数,u(t)、y(t)分别为系统输入、系统输出,相应权值为

则有ADALINE输出:

通过学习算法,使得权值的估计值[ ,…,
,…, ,
, ,…,
,…, ]在经过训练后不断地趋于真实的
]在经过训练后不断地趋于真实的 ,则ADALINE可视为真实系统的良好近似,由此确定各稳态工作点模型为
,则ADALINE可视为真实系统的良好近似,由此确定各稳态工作点模型为

2.基于ADALINE技术对全局LPV模型进行辨识
以三次样条函数为例,针对式(10-25)~式(10.29)情形,设计合理的辨识结构框架。将全局系统输入u(t)通过式(10-34)中传递函数 获得的估计值
获得的估计值 ,与对应的式(10-26)中的调度参数矢量运算所得的结果作为ADALINE输入,如图10-8所示。此时有对应设计:
,与对应的式(10-26)中的调度参数矢量运算所得的结果作为ADALINE输入,如图10-8所示。此时有对应设计:

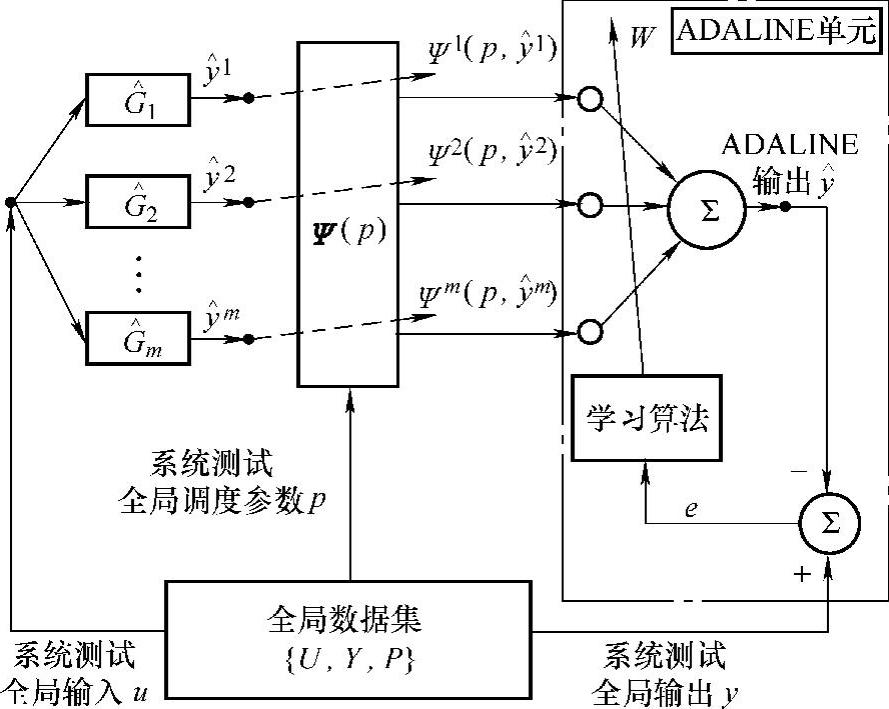
图10-8 基于ADALINE技术辨识全局LPV模型的方法结构示意图
则全局LPV模型的输出 的表达式为
的表达式为

将式(10-37)与式(10-28)相比较,能够得出W的估计即为θ的估计,如此即建立好全局系统的LPV模型。模型的精确性能够通过迭代停止准则和基于ADALINE的网络规模改进来调节,以达到要求的模型精度。
3.学习算法(https://www.xing528.com)
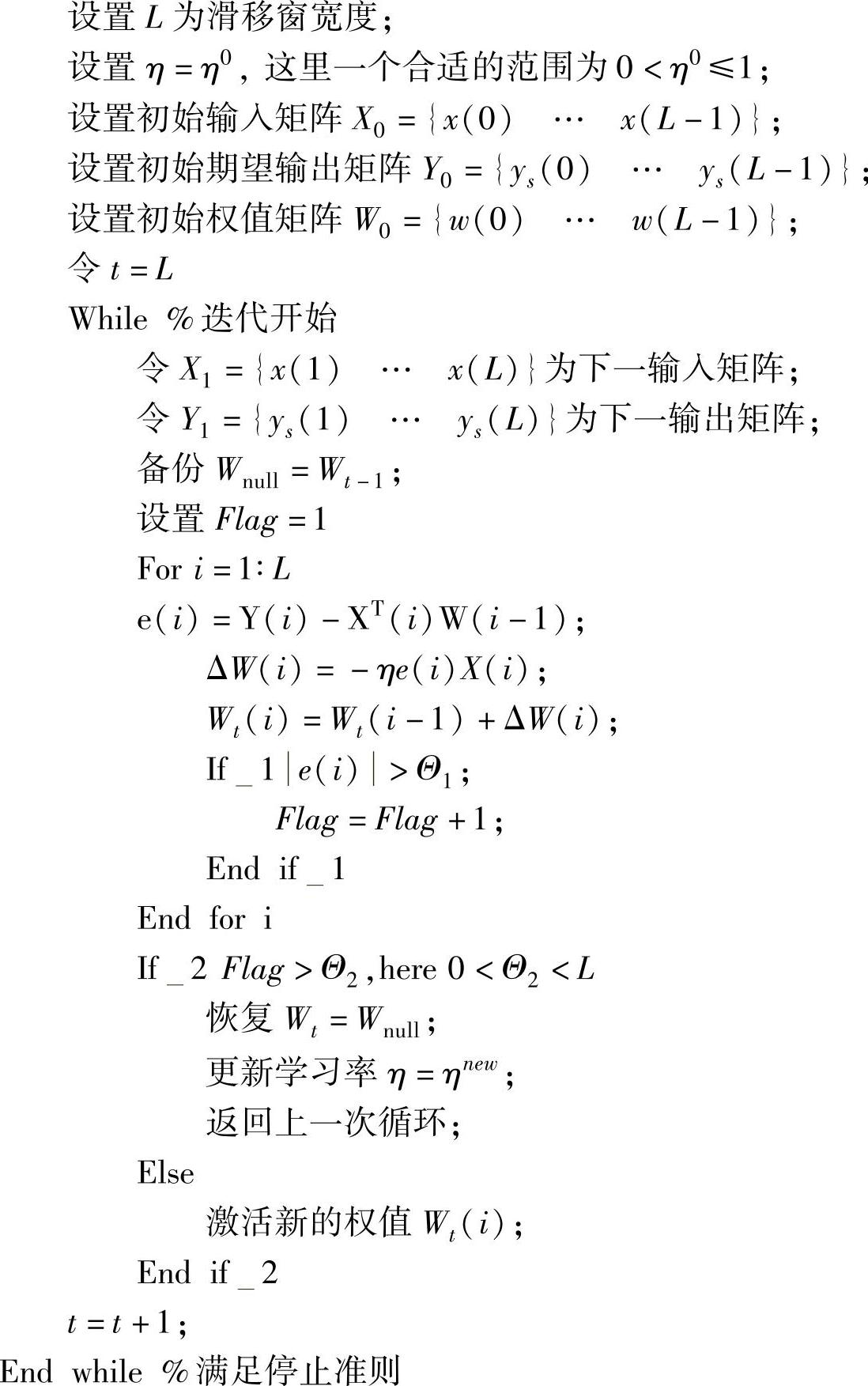
为更好地提高算法的速度与收敛性,可采用了滑移窗以及学习率更新的机制,对应的学习算法如下:
给定如下SISO系统模型:

式中:p∈[1.0,5.0];v(t)为滤波噪声 为白噪声序列且d(pk)使得噪声信号为无噪声信号功率的3%),分子、分母多项式参数满足:
为白噪声序列且d(pk)使得噪声信号为无噪声信号功率的3%),分子、分母多项式参数满足:
系统测试为全局激励测试,采用GBN信号以及如下测试方案:
1)工作点p1=1.0处,持续激励1000s;
2)调度参数变量p1从1.0均匀变化到2.5,持续激励1000s;
3)工作点p2=2.5处,持续激励1000s;
4)调度参数变量p从2.5均匀变化到5.0,持续激励1000s;
5)工作点p3=5.0处,持续激励1000s。
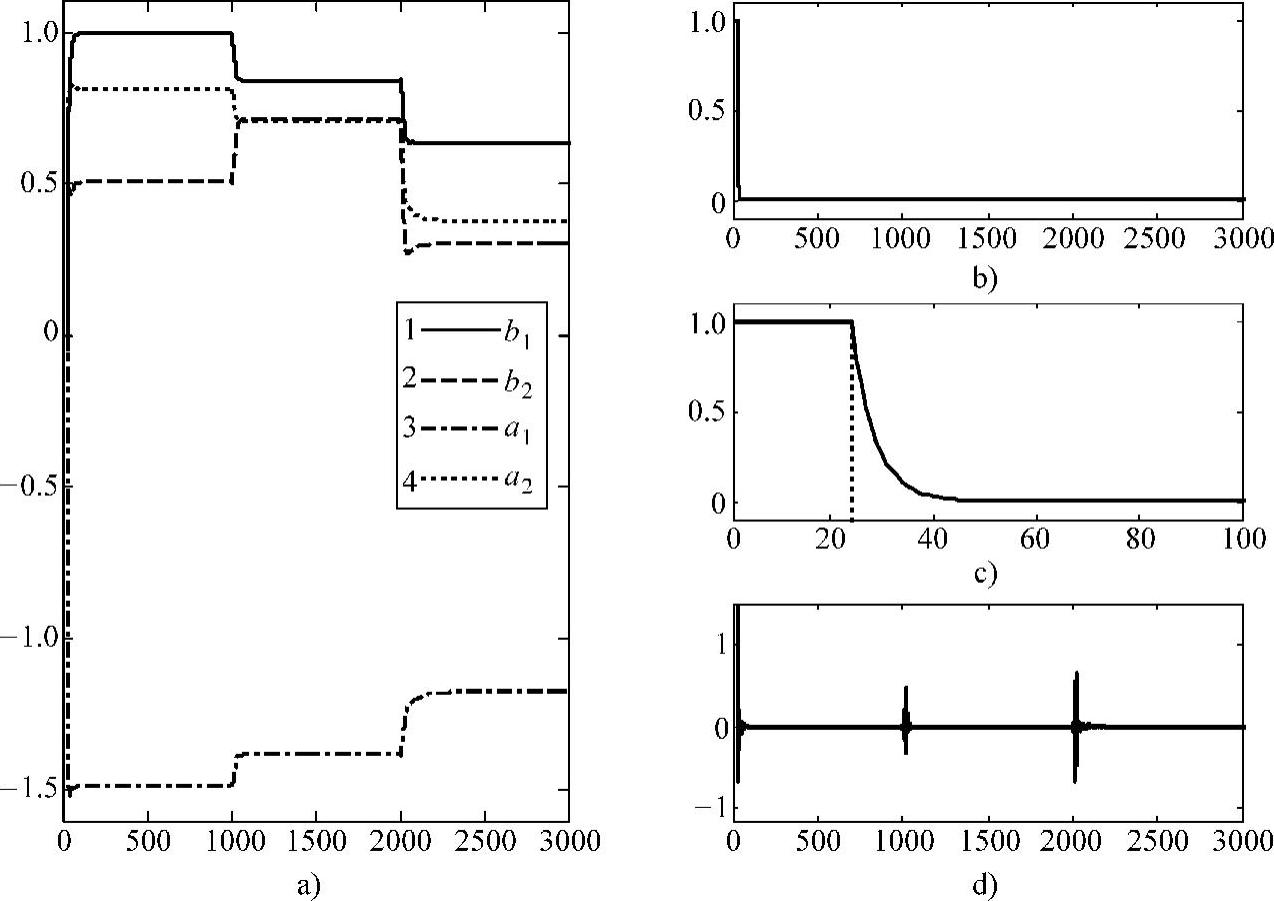
图10-9 基于ADALINE技术辨识全局LPV模型的方法结构示意图
a)模型参数估计 b)η变化曲线 c)η变化曲线(前100步) d)模型误差
获取测试输入输出数据后,可以截取三个工作点数据辨识出三个当地线性模型,相应的辨识结果如图10-9所示。由图a可以看到,对于从某一稳定工作点切换到另一稳定工作点的系统,该方法能够很好地在较短学习时间之后跟踪系统参数。同时依据ADALINE的自适应性,可以将原本针对三个工作点依次进行辨识的次数降低为一次。从图b、c可以看出,学习率在训练伊始,会根据学习算法自动调整,而当调整到适应系统特性之后,则维持恒定的值。图d模型误差曲线,可以看到只有在切换工作点的时候,会有短暂的较大偏差,而其他区域误差均接近于零。
根据所得的三个当地线性模型,通过插值函数即可得到全局LPV模型,相应的结果如图10-10所示。此时设置的系统迭代停止准则为达到某一误差精度即停止,可以看到估计的权值函数并没有非常光滑,但其对应的不同调度参数p下的阶跃响应对比结果已经很好,但在p=3.9,4.5处均可以看到有一定的稳态偏差。
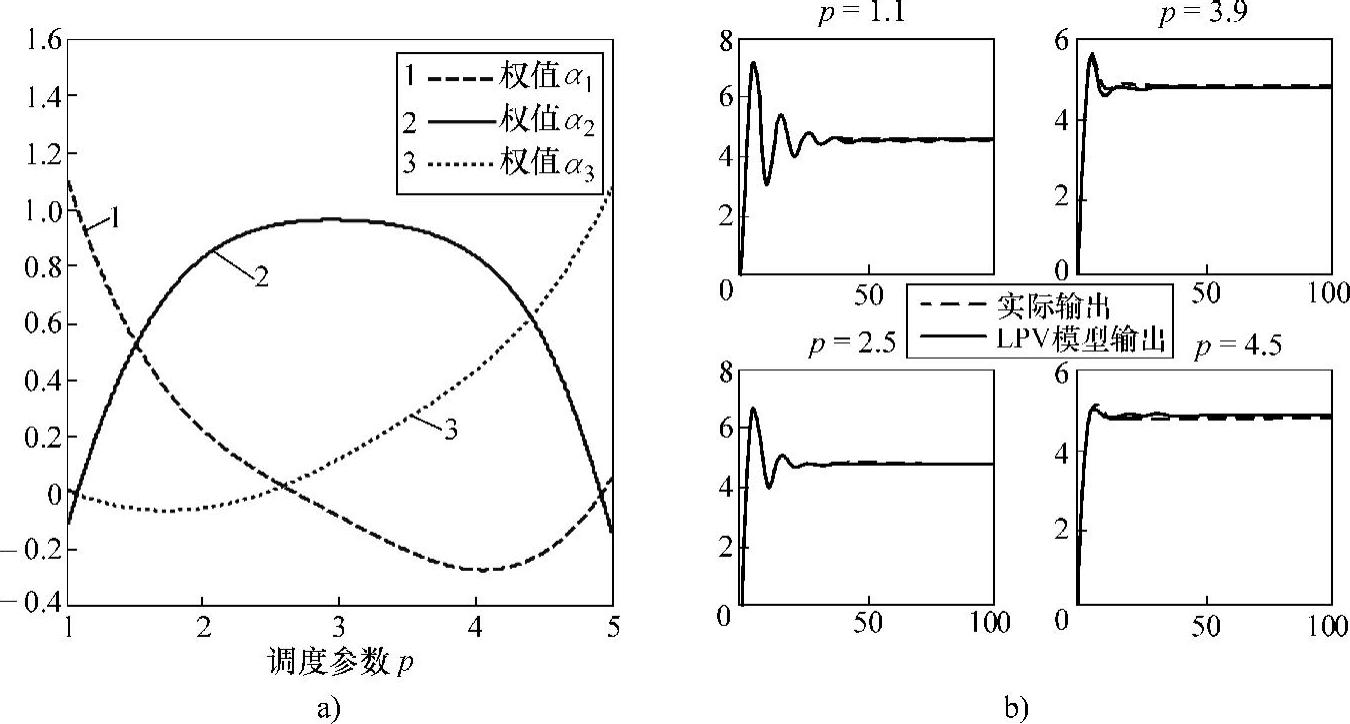
图10-10 辨识结果
a)插值系数随增量调度系数变化 b)系统单位阶跃响应对比
设置更高精度的迭代停止准则,再一次进行全局LPV模型辨识后,则能获取如图10-11的结果。此时,估计的权值函数在对应的三个工作点处,恰好满足理想权值(如p1=1.0处满足α1=1,α2=0,α3=0)。而从相应的阶跃响应对比可以看得,p=3.9,4.5处的稳态偏差已经消除,因此要优于前述权值估计。当然,此时要耗费比前述更多的计算内存和计算时间,当精度要求并不是非常高的情形下,可采用前述结果。
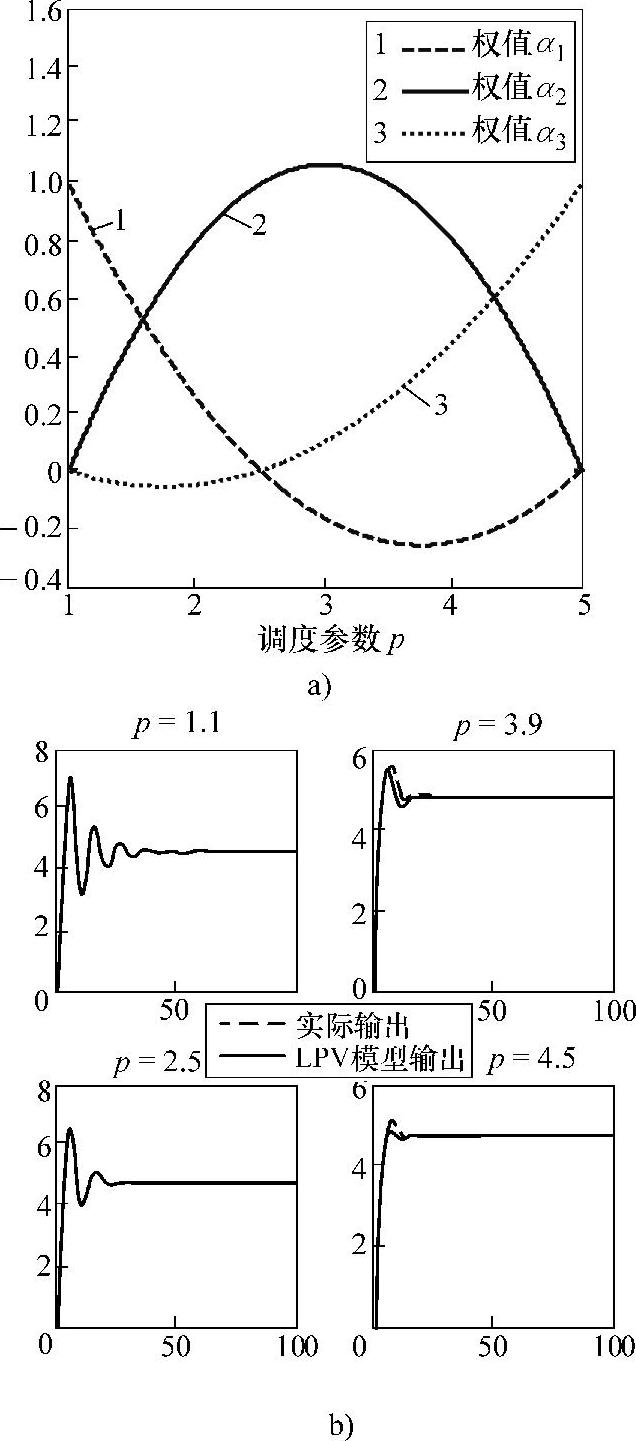
图10-11 更高精度准则下的辨识结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。