



1.传递函数模型
传递函数的辨识是经典控制理论中不可缺少的环节,其主要包含时域法和频域法两种。时域方法包括脉冲相应法、阶跃响应法和矩形脉冲相应法等,其中阶跃响应法为最常用方法。用阶跃响应方法辨识的对象主要有一阶惯性滞后环节、二阶等容惯性对象、二阶等容惯性加零点对象、二阶惯性加零点对象、高阶自衡对象等,相关的辨识方法多采用两(多)点法[28]。频域法一般可由试验测得系统频率响应,然后根据频率特性拟合的Levy法获得系统传递函数。
2.模型形式与辨识方法
线性时不变系统是系统辨识中常用的模型,模型特性可通过脉冲相应、频率响应、功率谱或者谱密度等非参数模型描述,也可以采用输入输出差分方程、状态空间方程、传输函数等参数模型描述。对于非参数模型辨识方法,常用的有相关分析法、谱分析法等,且可以通过脉冲响应或频率响应转化为参数模型。而最小二乘法、极大似然法、预报误差法以及卡尔曼滤波法等常作为参数辨识方法。对于非线性系统,可通过小扰动理论建立参数线性变化的非线性模型,或采用神经网络模型、模糊模型等非线性模型建模。
3.最小二乘法原理
最小二乘法是一种经典的数据处理方法,由18世纪末高斯(K.F.Gauss)在行星轨迹的计算中提出。最小二乘法是系统辨识中是基本的参数估计方法,既可以用于动态系统,也可以用于静态系统;既可以用于线性系统,也可以用于非线性系统;既可以用于离线估计,也可以用于在线估计。
给定单输入单输出(single-input single-output,SISO)系统数学模型为
A(q-1)y(k)=B(q-1)u(k)+e(k) (10-5)
式中, ,q-1为后移算子,则模型可以改写为
,q-1为后移算子,则模型可以改写为

此时若已知输入和输出序列{u(k),y(k)},为求参数ai,bi,i=0~n的估计值,引入向量:

则式(10-5)可以改写为
y(k)=φT(k)θ+e(k) (10-8)
假设θ的估计值为 ,则
,则

引入最小误差准则:

则 为使得式(10-9)取最小时的θ值,而:(https://www.xing528.com)
为使得式(10-9)取最小时的θ值,而:(https://www.xing528.com)

则式(10-10)的指标即为残差的二次方和,取k=n+1,…,n+N,共计N次观测,记:
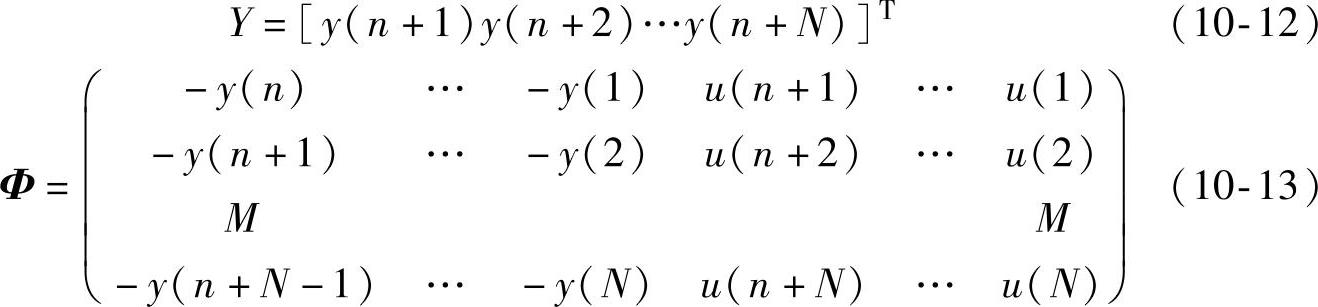
可得矢量形式的线性方程组:
Y=Φθ+e (10-14)
则按照下述准则函数来求取 :
:

根据J对 求偏导,并令偏导数为0,可得
求偏导,并令偏导数为0,可得

即有 得
得

当ΦTΦ非奇异时,有

此时的 称为最小二乘估计值,对应的方法叫作最小二乘法,以最小二乘法为基础的有递推最小二乘法、增广最小二乘法、广义最小二乘法、辅助变量最小二乘法等估计方法,用以解决不同的系统参数结构下的辨识。将一般的模型结构集写成下述形式:
称为最小二乘估计值,对应的方法叫作最小二乘法,以最小二乘法为基础的有递推最小二乘法、增广最小二乘法、广义最小二乘法、辅助变量最小二乘法等估计方法,用以解决不同的系统参数结构下的辨识。将一般的模型结构集写成下述形式:

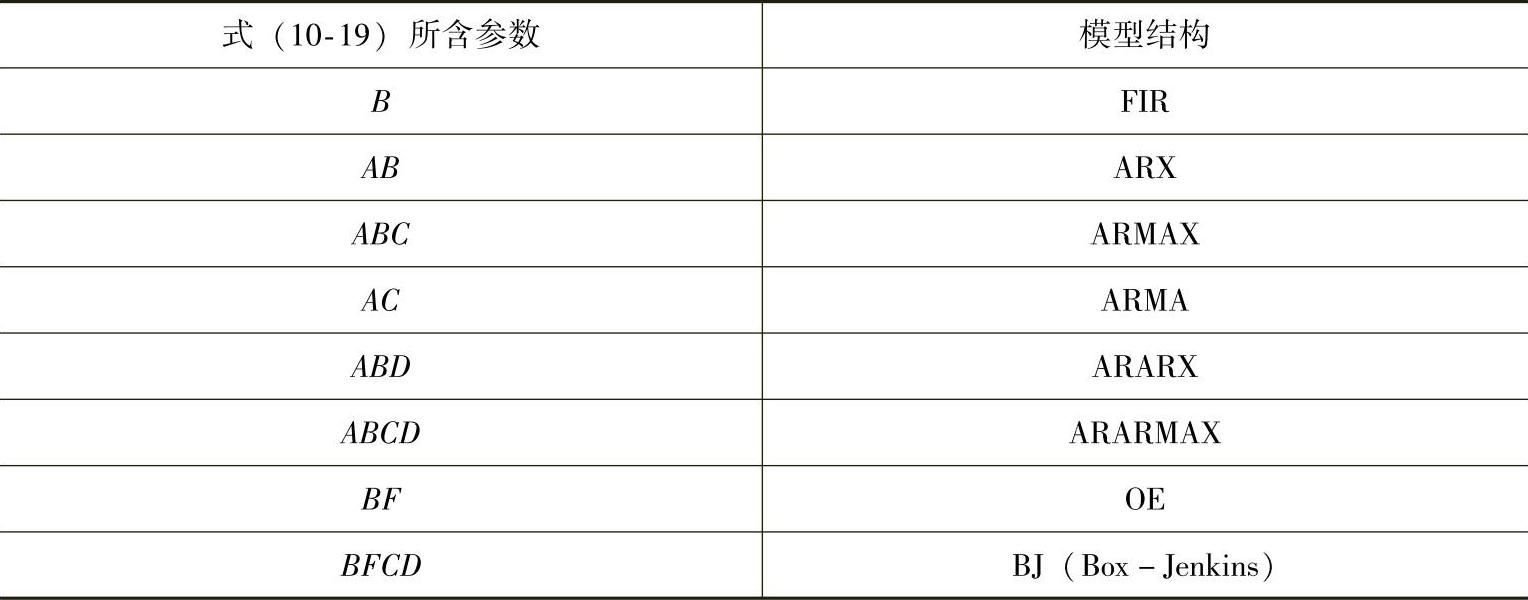
则对应的参数(多项式)与模型结构详见表10-1。
表10-1 式(10-19)中参数与模型结构关系
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。