



捕获最大功率的过程首先是一个转速控制过程。模糊逻辑控制器A通过调整风轮转速,使之与通过风轮的风速相适应,从而获得最大能量转换效率。其工作原理如图9-5所示。当转速为n1,风速为v1时,发电机的工作点为A;这时控制器需要对转速进行调整,当转速从n1调整到n2时,发电机的工作点将从A点调整到B点,从而获得该风速下的最大功率输出;如果风速继续增加到v3,输出功率将跳跃到D点,然后控制器将调整转速使工作点到达E点。如果风速降落到v2,这时工作点变成G点,控制器通过调整转速,使工作点达到最大H点。
根据上述原理,模糊控制器对最佳工作点的实时搜索方案如下:
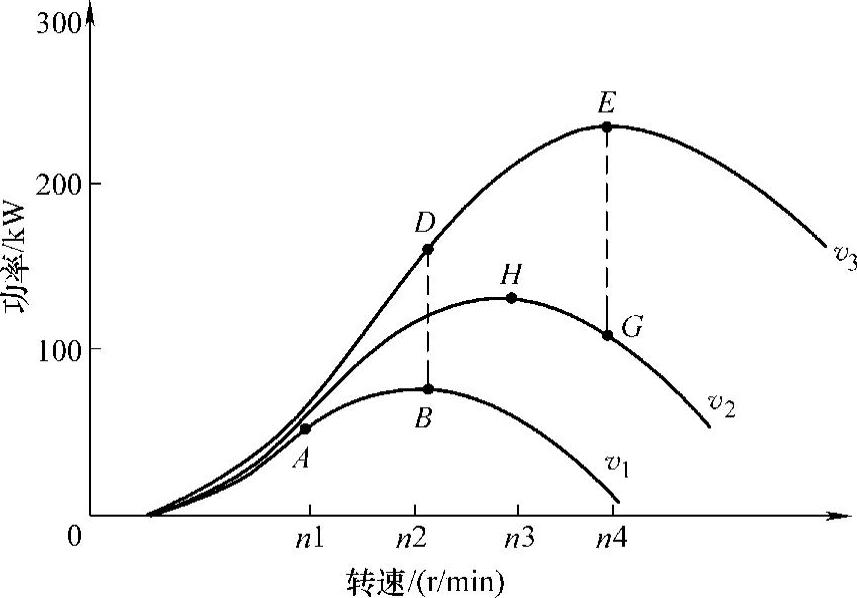
图9-5 最大功率的追踪过程
由于作用在风轮桨叶上的风速除桨叶自身以外是无法感知的,常规的方法是把风电机组当作风速仪,即通过测量风力机的输出功率来估算风速。根据这一线索,模糊控制器以功率测量值为依据,逐步改变电机转速:当输出功率的增量ΔPo为正,同时电机转速的增量Δno也为正,则新的转速增量Δnr继续保持在同一方向(为正);当电机转速的增量Δno为正,而输出功率的增量ΔPo为负,这时新的转速增量Δnr为负,即搜索的方向相反。图9-6所示为转速控制框图。
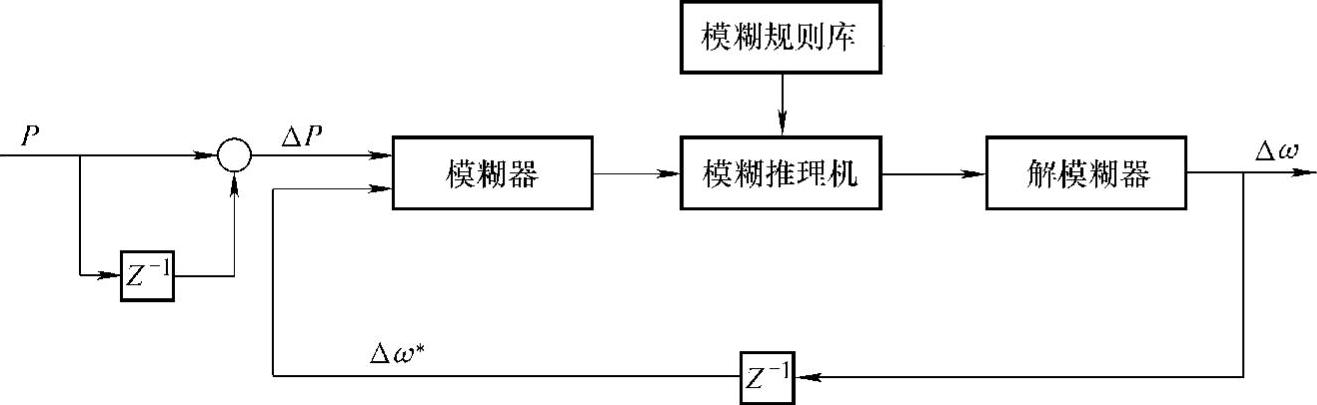
图9-6 模糊控制器A的框图
据此,我们可以建立输入变量ΔPo和Δno及输出变量Δnr的模糊隶属函数(见图9-7),通过模糊规则矩阵来确定转速控制变量。(https://www.xing528.com)
ΔPo和Δnr的隶属函数的设置并不是均匀的,当变量接近0时,隶属函数的敏感性增加,以便在搜索迫近最佳点时,及时调整搜索步长。
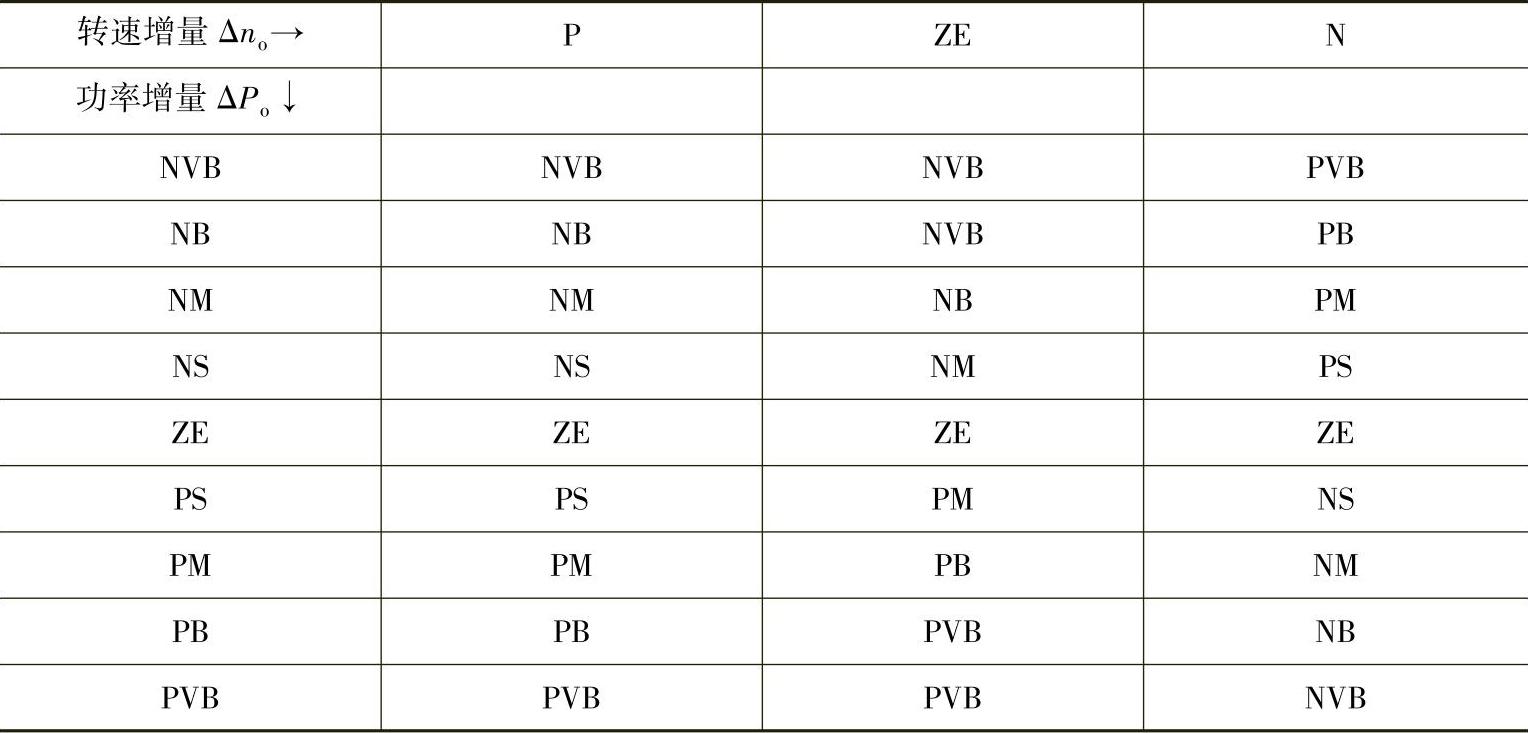
模糊控制器A的判定规则见表9-3。例如,当ΔPo为PM(正中),Δno为P(正),则输出变量Δnr为PM(正中)
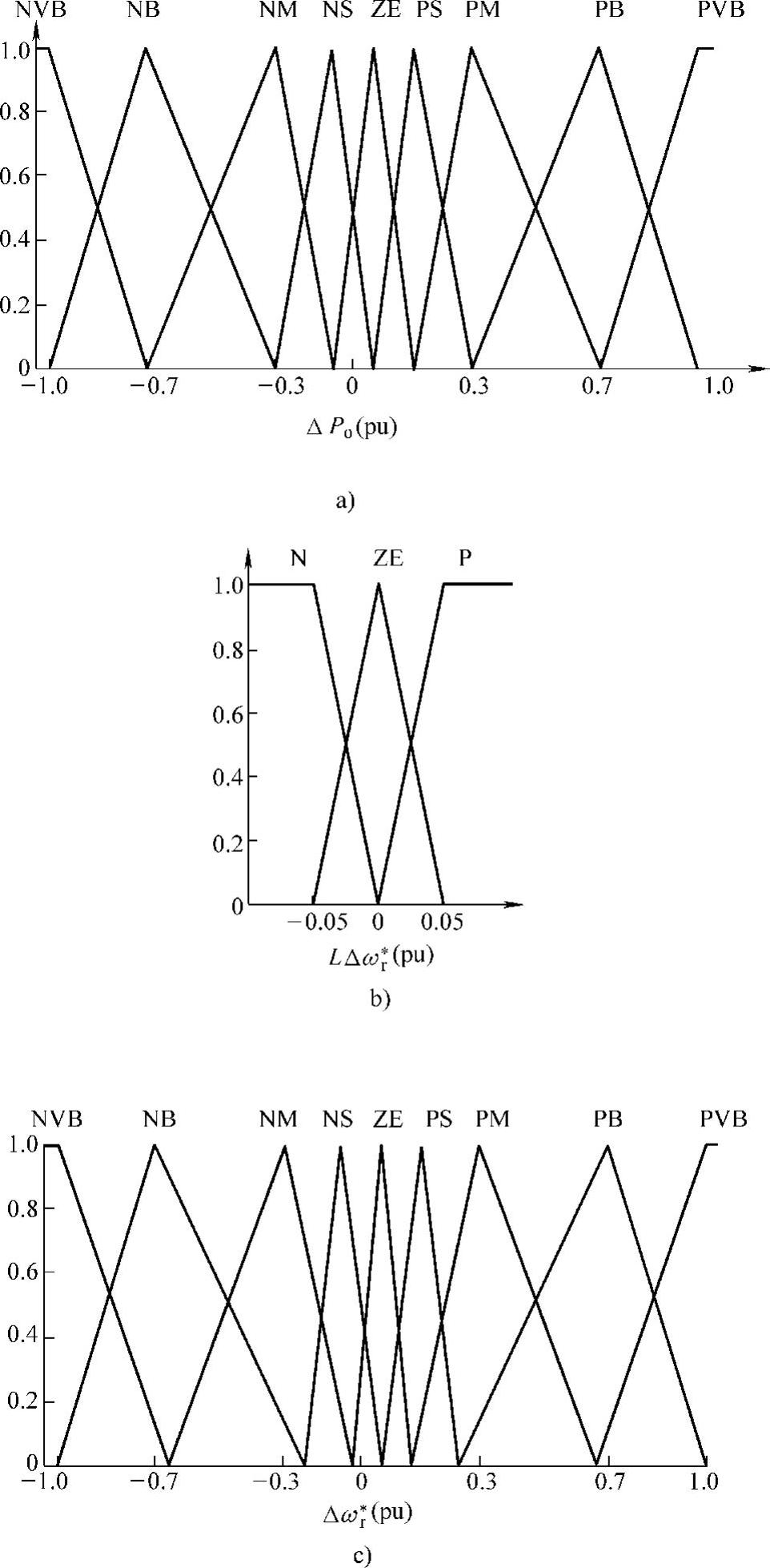
图9-7 模糊控制器A的隶属函数
表9-3 模糊控制器A的判定规则
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。