



风电机组的大致运行工作区,可以分为两段,低风速段是最大风能捕获工作区,主要是通过控制发电转矩,来维持最优叶尖速比达到提高风能利用率的目标;而我们的变桨距控制器主要针对高风速段恒功率控制,即维持发电功率平稳。
L1变桨距控制方案验证采用的是额定功率1.5MW三叶水平轴迎风式变速风力发电机,风轮转动惯量Jr=4456761kg·m3,风轮外部阻尼Kr=45.52N·m/(rad·s),发电机转动惯量Jg=123kg·m2,发电机外部阻尼Kg==0.4N·m/(rad·s),Jt和Kt按Jt=Jr+n2gJg和Kt=Kr+n2gKg计算得到。
实际模型 =(Ta(ωr,β)-Ktωr-Tg+δ)/Jt中大部分参数的近似值是可以得到的。这为我们参考模型的设计提供了依据。
=(Ta(ωr,β)-Ktωr-Tg+δ)/Jt中大部分参数的近似值是可以得到的。这为我们参考模型的设计提供了依据。
根据实际模型,我们将极点配置在-0.52,转速 相对于参考额定转速值r的稳态增益为1,在这里我们给出一种仿真效果较好的一阶线性参考模型:
相对于参考额定转速值r的稳态增益为1,在这里我们给出一种仿真效果较好的一阶线性参考模型:

其中,Am=-0.52,b=400,βipart(t)=-kgr,r=188.4rad/s。
接下来,将由参考模型构成的状态预测器设计为

 对桨距角控制量的增益非线性作调整,而
对桨距角控制量的增益非线性作调整,而 则对实际模型与增益非线性的参考模型之间存在的误差进行估计。这两个作为L1控制器中的可校正参数,采用自适应机制进行在线学习。
则对实际模型与增益非线性的参考模型之间存在的误差进行估计。这两个作为L1控制器中的可校正参数,采用自适应机制进行在线学习。
自适应机制将实际模型发电机转速输出ωr与状态预测器输出 作比较,对系统参数变化和扰动带来的性能不稳定起到抑制,使得
作比较,对系统参数变化和扰动带来的性能不稳定起到抑制,使得 维持在0附近。
维持在0附近。
在Bladed风力发电仿真软件下,对采用的L1控制器做仿真验证,仿真时,采用的采样周期和控制周期皆为0.04s。对控制器中参数学习率进行调试,可以得到当仿真效果比较理想时,下面自适应调整率中参数的比较合适的取值。

其中,ΓσPb=0.12,ΓφPb=0.0004; 可选为2.14,
可选为2.14, 可选为5.38。
可选为5.38。
实际控制器是加入低通滤波器环节对输出的高频噪声进行抑制的。低通滤波器以频域形式可以表示为 ,减小k则可以增强低通滤波的效果。实际控制器如下:(https://www.xing528.com)
,减小k则可以增强低通滤波的效果。实际控制器如下:(https://www.xing528.com)

较理想的仿真情况下,k=2.4。
变桨距执行系统的模型是带有死区的非线性环节。风电机组的桨距角的可调节范围和变桨距速率范围都是有限制的。当桨距角和变桨距速率在饱和极限范围内时,变桨距执行系统表现为线性特性。执行系统的模型近似为一阶系统 。因为,桨距角的变化范围为0°~90°,所以,需要对实际控制器输出加入限幅环节,限制在0~1.57rad。同时,对于本实施例中的风力机,桨距角的变化率要在±10°/s之内。
。因为,桨距角的变化范围为0°~90°,所以,需要对实际控制器输出加入限幅环节,限制在0~1.57rad。同时,对于本实施例中的风力机,桨距角的变化率要在±10°/s之内。
在Bladed风电仿真软件中,在采用图8-9中的风速情况下发电机转速曲线如图8-10所示。两条曲线分别是带增益调整的PI控制器的发电机转速控制效果和L1控制器的发电机转速控制效果。可以很明显地看出,L1控制器能够更好地维持转速平稳。
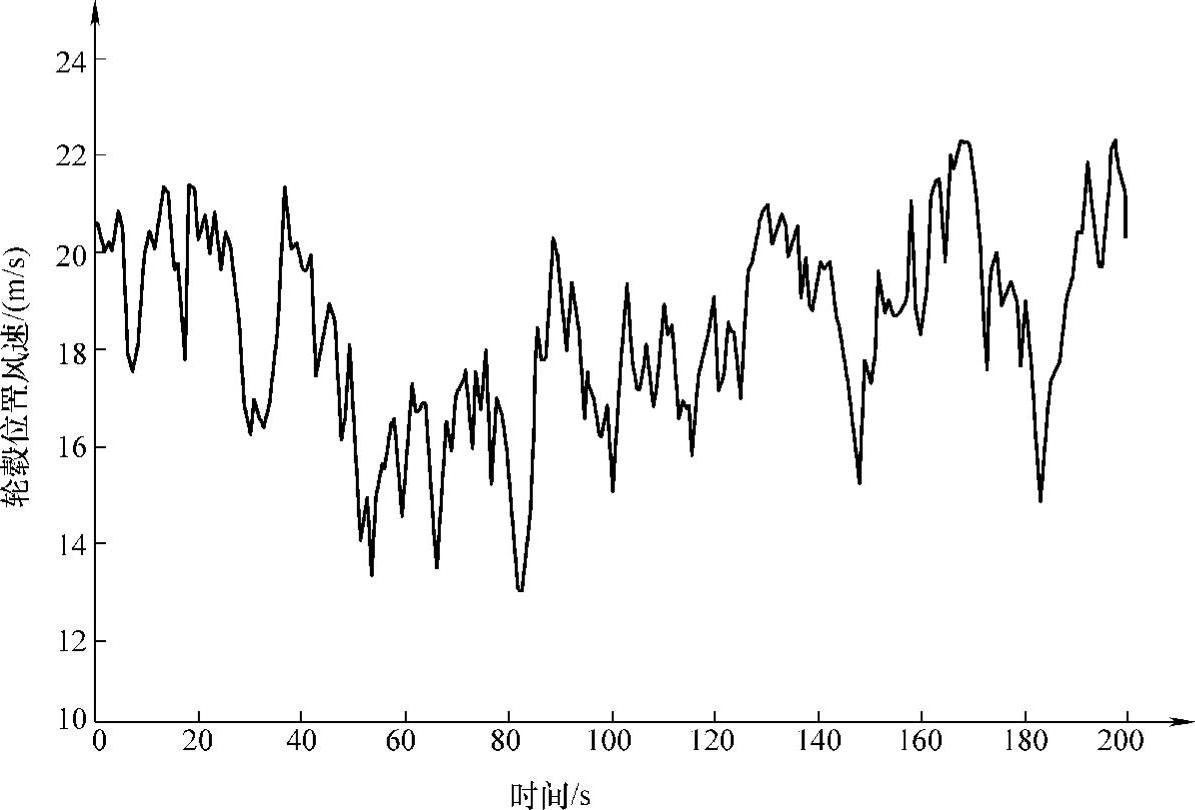
图8-9 风速曲线图
L1变桨距控制器技术方案在该款额定功率1.5MW大型风力发电机进行了验证,结果如图8-11和图8-12所示。采用L1控制器能够更好地控制转速更加平稳,保证功率平稳。在风发生突变时可以更好地抑制机组超速,减少机组大风停机时间。
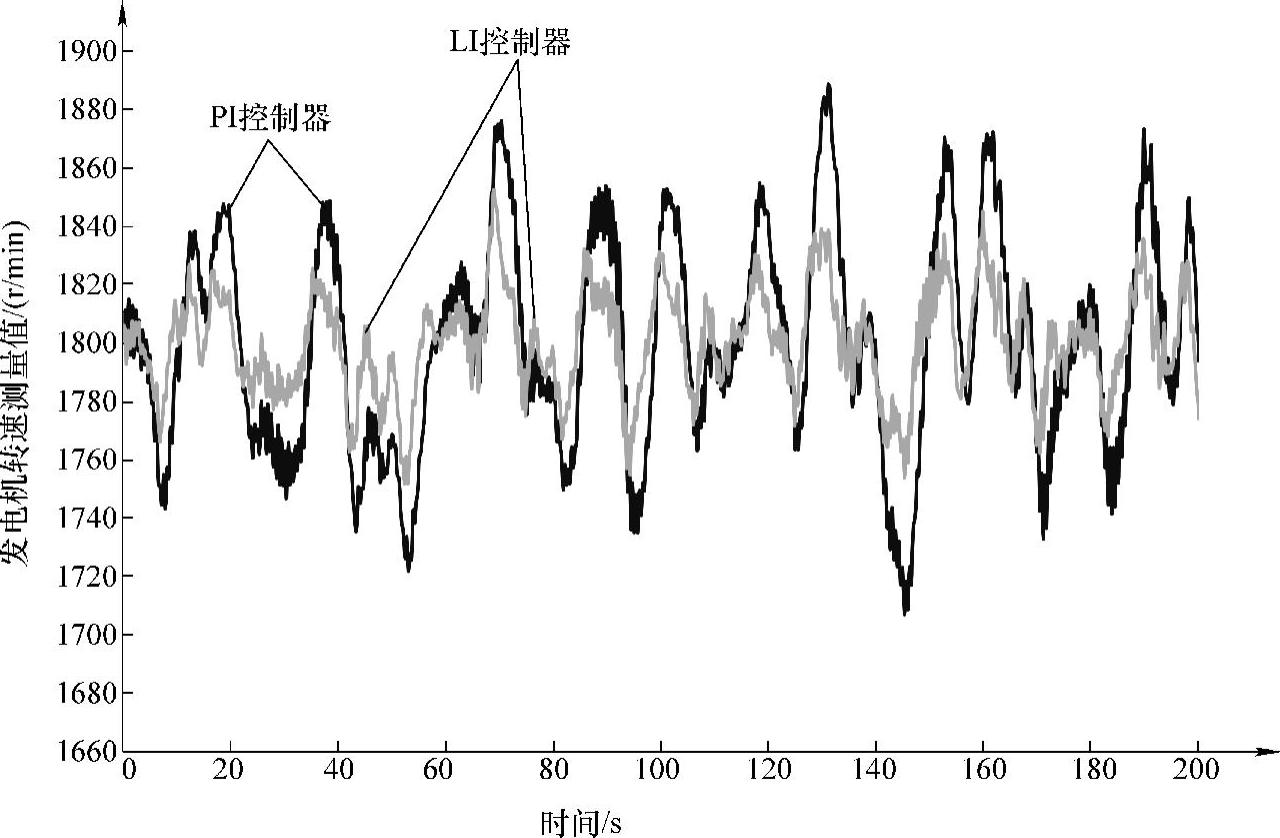
图8-10 发电机转速曲线图
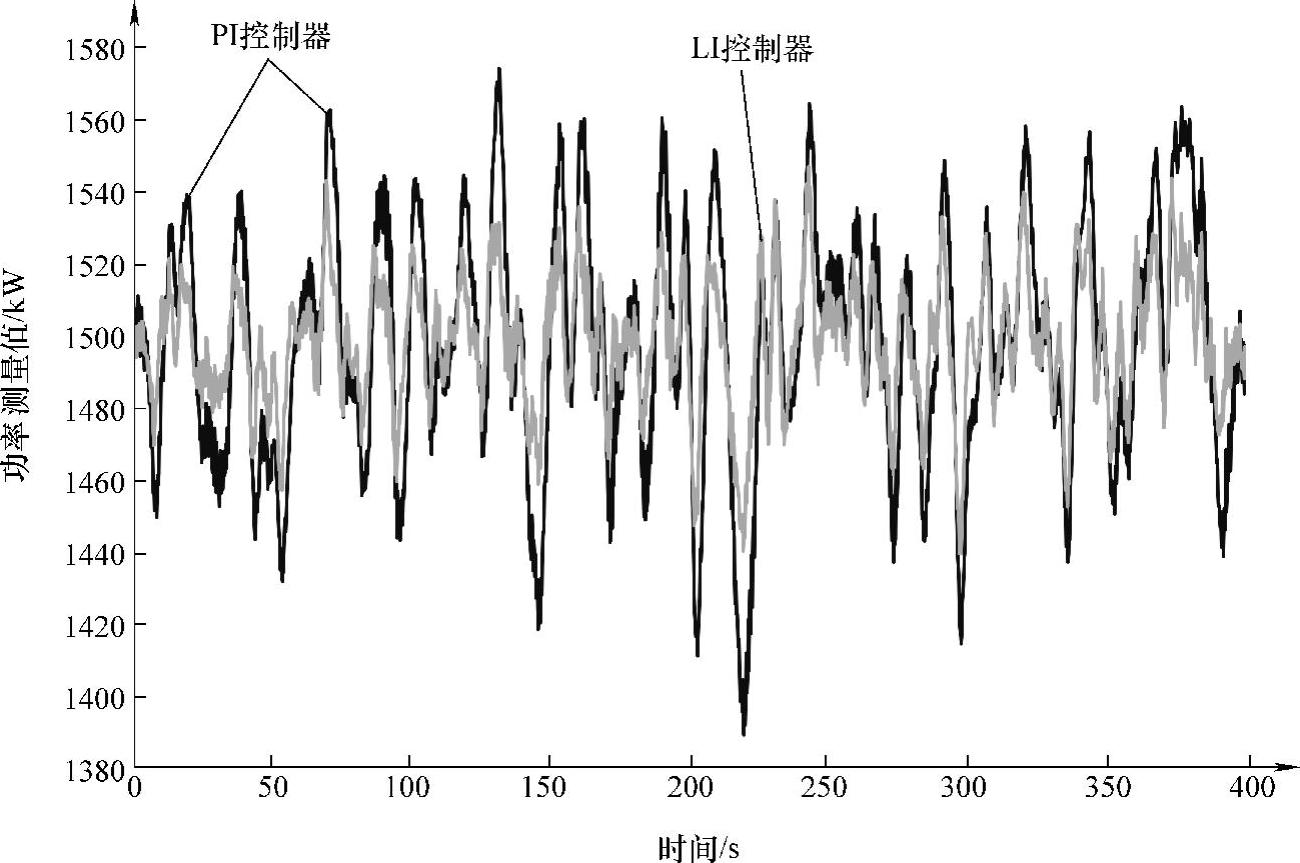
图8-11 风力发电机组发电功率曲线图
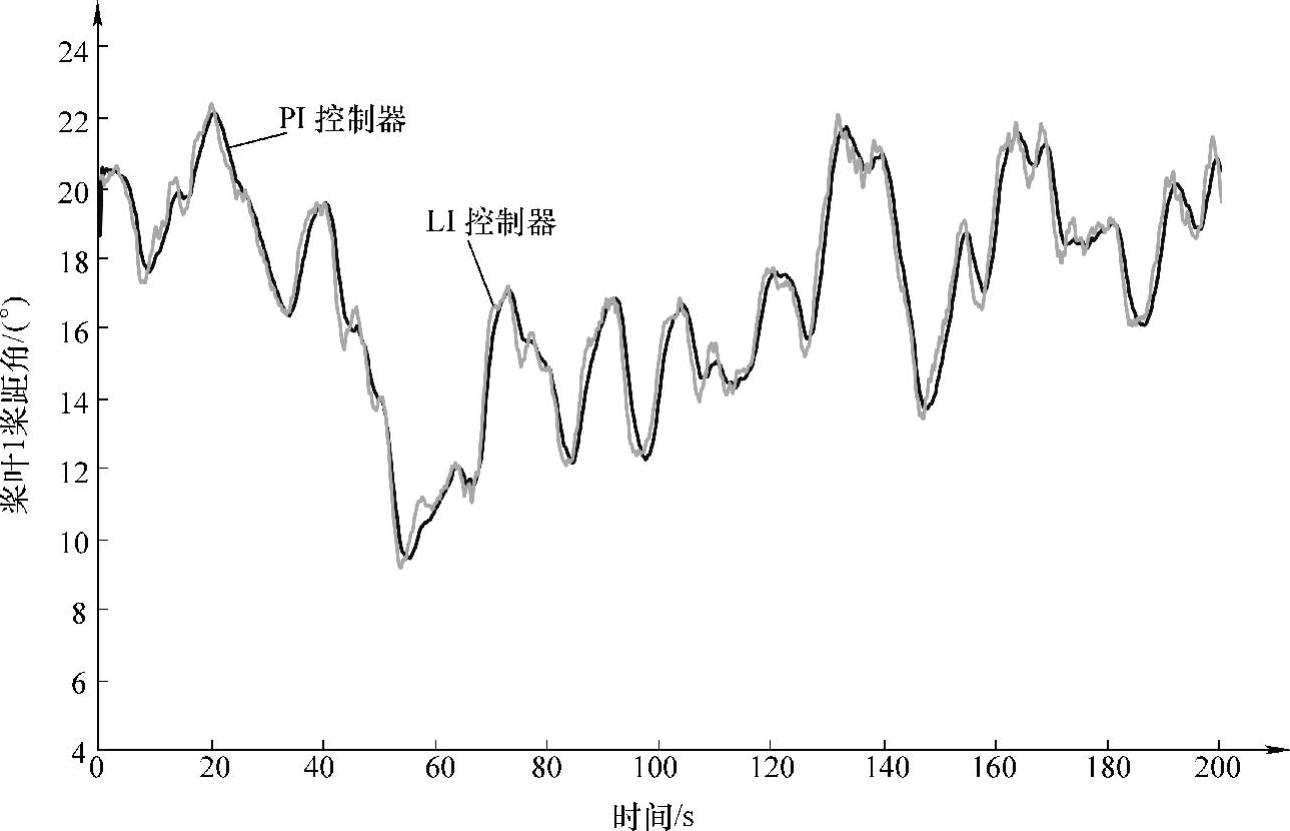
图8-12 风力发电机组桨距角曲线图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。