



【摘要】:图8-6所示是L1变桨距控制器作为一种模型参考自适应控制器的原理图。对发电机转速ωr进行测量,将额定转速ωrref与发电机转速ωr的偏差e送入L1控制器。L1控制器计算得到理想的桨距角β*,通过控制桨距角β对气动转矩Ta起到与风速v变化作用相反的效果,使得偏差e为0,让风力发电机组维持在额定转速运行。图8-7 L1变桨距控制器设计流程图图8-8 高风速段L1变桨距控制器简易框图
由状态预测器、实际模型的理想输入和自适应机制三部分,构成了我们设计的L1控制器如图8-5所示。实现实际被控对象对参考模型的跟踪收敛,即当被控对象的参数被精确地在线估计时,相应的控制律使系统的输出与参考模型的输出相等。图8-6所示是L1变桨距控制器作为一种模型参考自适应控制器的原理图。整个的控制器设计流程如图8-7所示。
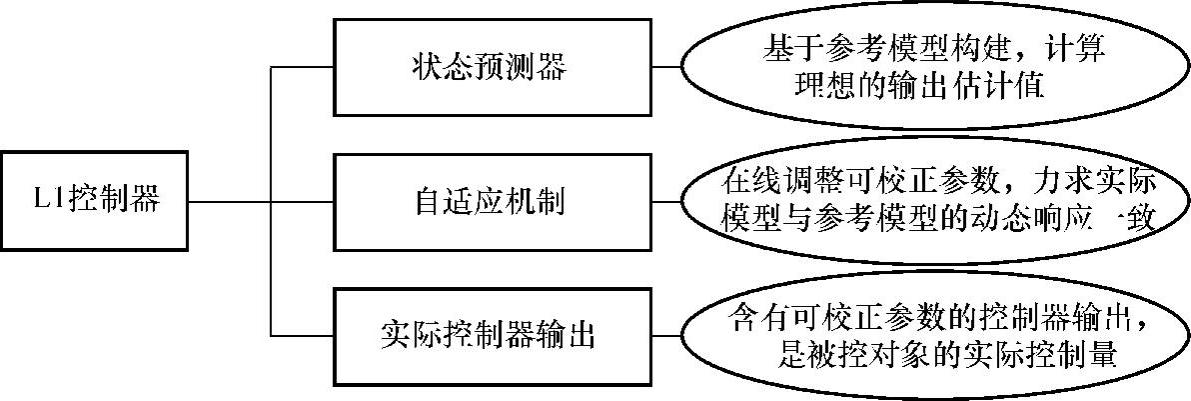
图8-5 L1控制器模块图

图8-6 L1变桨距控制器控制原理图
图8-8是高风速段L1变桨距控制器简易框图。风电机组的转速主要受到三种力矩的作用,气动转矩Ta、发电转矩Tg和阻尼力矩Ktωr。在高风速段,发电转矩Tg和阻尼转矩Ktωr基本维持在恒定值,而气动转矩主要与风速v和桨距角β两个量有关。当风速v快速变化时,会导致气动转矩Ta发生相应的改变,这样风电机就无法维持额定转速。对发电机转速ωr进行测量,将额定转速ωrref与发电机转速ωr的偏差e送入L1控制器。L1控制器计算得到理想的桨距角β*,通过控制桨距角β对气动转矩Ta起到与风速v变化作用相反的效果,使得偏差e为0,让风力发电机组维持在额定转速运行。(https://www.xing528.com)
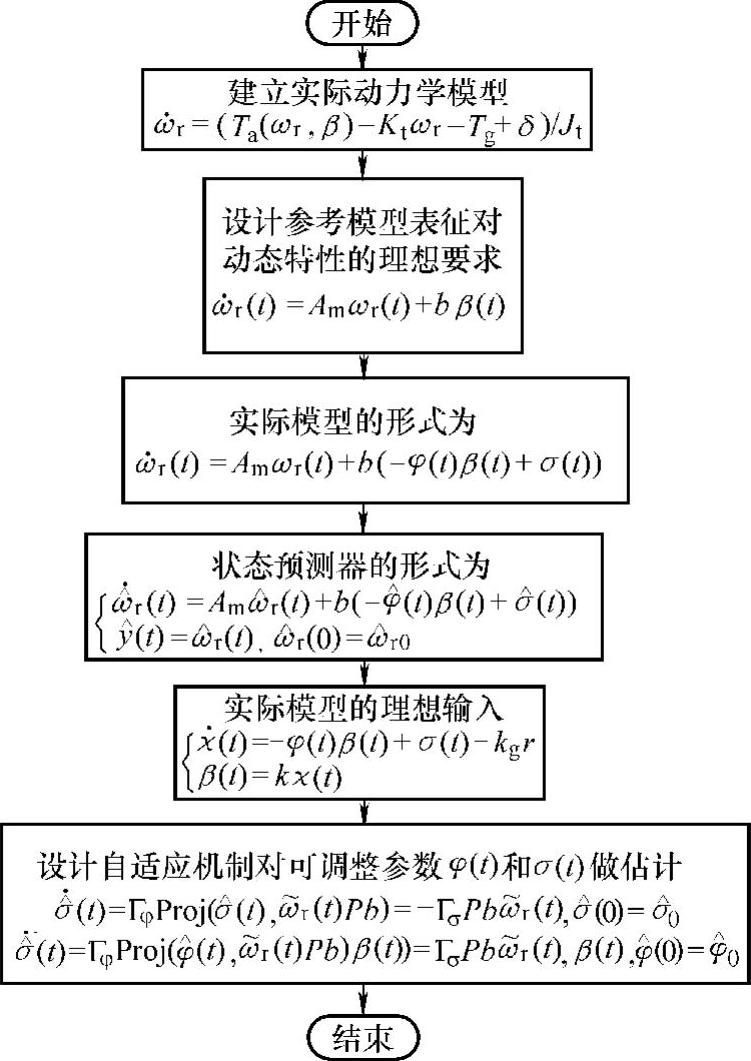
图8-7 L1变桨距控制器设计流程图
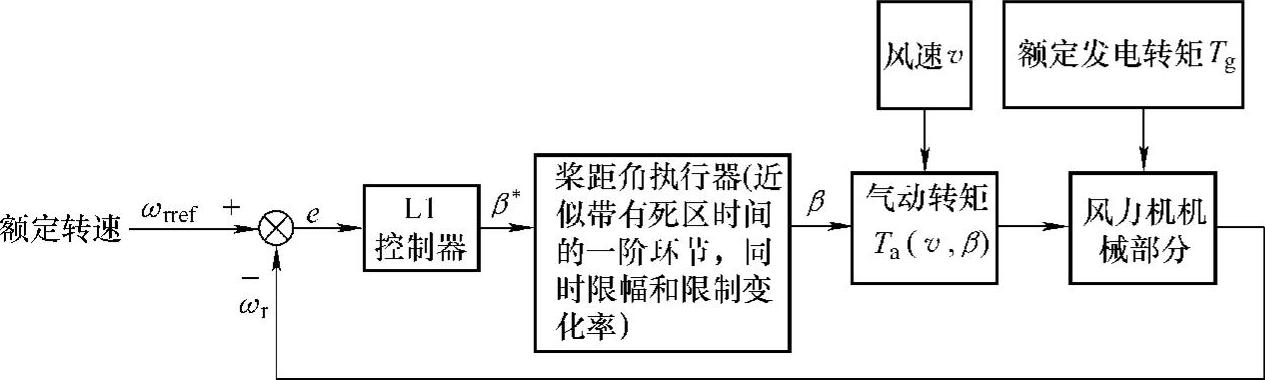
图8-8 高风速段L1变桨距控制器简易框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。