



【摘要】:首先利用误差转换的设计方法来优化系统的动态特性,包括调整系统的收敛时间、超调量和稳态误差。误差转换的基本思想是当原始误差趋于指定的误差上下界时,转换后的误差将趋于无穷大。图8-1 转换函数示意图因此,由式(8-1)和式(8-2)可知,当转换误差s有界时,我们可以得到-ηφ<e<φ,即保证了原始功率跟踪误差始终在其用户设计的上下界中,也就保证了系统的稳态误差、收敛速度、超调量等动态指标。
首先利用误差转换的设计方法来优化系统的动态特性,包括调整系统的收敛时间、超调量和稳态误差。误差转换的基本思想是当原始误差趋于指定的误差上下界时,转换后的误差将趋于无穷大。同理,如果我们可以保证转换误差是一个有界信号,也就可以保证原始误差不超过指定的误差界,也就保证了风力发电机组跟踪最优功率曲线的动态特性。
假设实际风能功率输出和理想最优功率输出之间的原始误差表示为e(t),转换误差为s(t)。如果我们设计的误差上界为φ(t),误差下界为-ηφ(t),则动态特性与误差上下界的关系可以确定如下:①系统的稳态跟踪误差e(∞)满足-ηφ(∞)≤e(∞)≤φ(∞);②系统的收敛时间大于上界的收敛速度;③系统的超调量小于ηφ(0)。因此,我们设计转换误差s(t)与原始误差e(t)的关系为
e(t)=φ(t)M(s) (8-1)
其中,M(s)是用户自定义的单调递增且可逆的光滑函数,M(s)满足
 (https://www.xing528.com)
(https://www.xing528.com)
图8-1所示为转换函数M(s)的示意图。
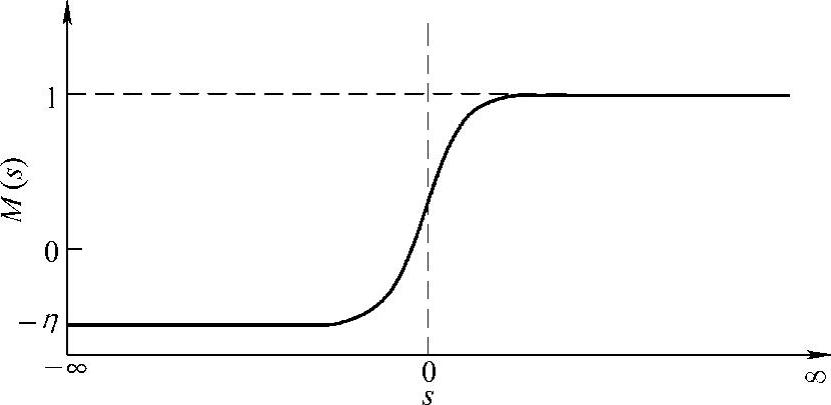
图8-1 转换函数示意图
因此,由式(8-1)和式(8-2)可知,当转换误差s(t)有界时,我们可以得到-ηφ(t)<e(t)<φ(t),即保证了原始功率跟踪误差始终在其用户设计的上下界中,也就保证了系统的稳态误差、收敛速度、超调量等动态指标。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。