



仿真分析平均风速为12m/s、20m/s湍流风况下,采用独立变桨控制(IPC)和采用协同变桨控制(CPC)的控制效果差异。
图7-21、图7-22分别是12m/s、20m/s平均风速湍流风工况下,采用独立变桨控制(IPC)和采用协同变桨控制(CPC)的输出桨距角差异比较。为了更清楚比较两种控制策略间的输出桨距角差异,图7-21、图7-22中的图b截取了图a中前100s时间轴的数据。从图中可以知,独立变桨控制输出桨距角是协同变桨控制输出桨距角,叠加一个近似正弦变化偏差桨距角,而这个近似正弦变化的偏差桨距角就是偏差变桨控制输出桨距角,其频率为1P(风轮转频),幅值是变化的。
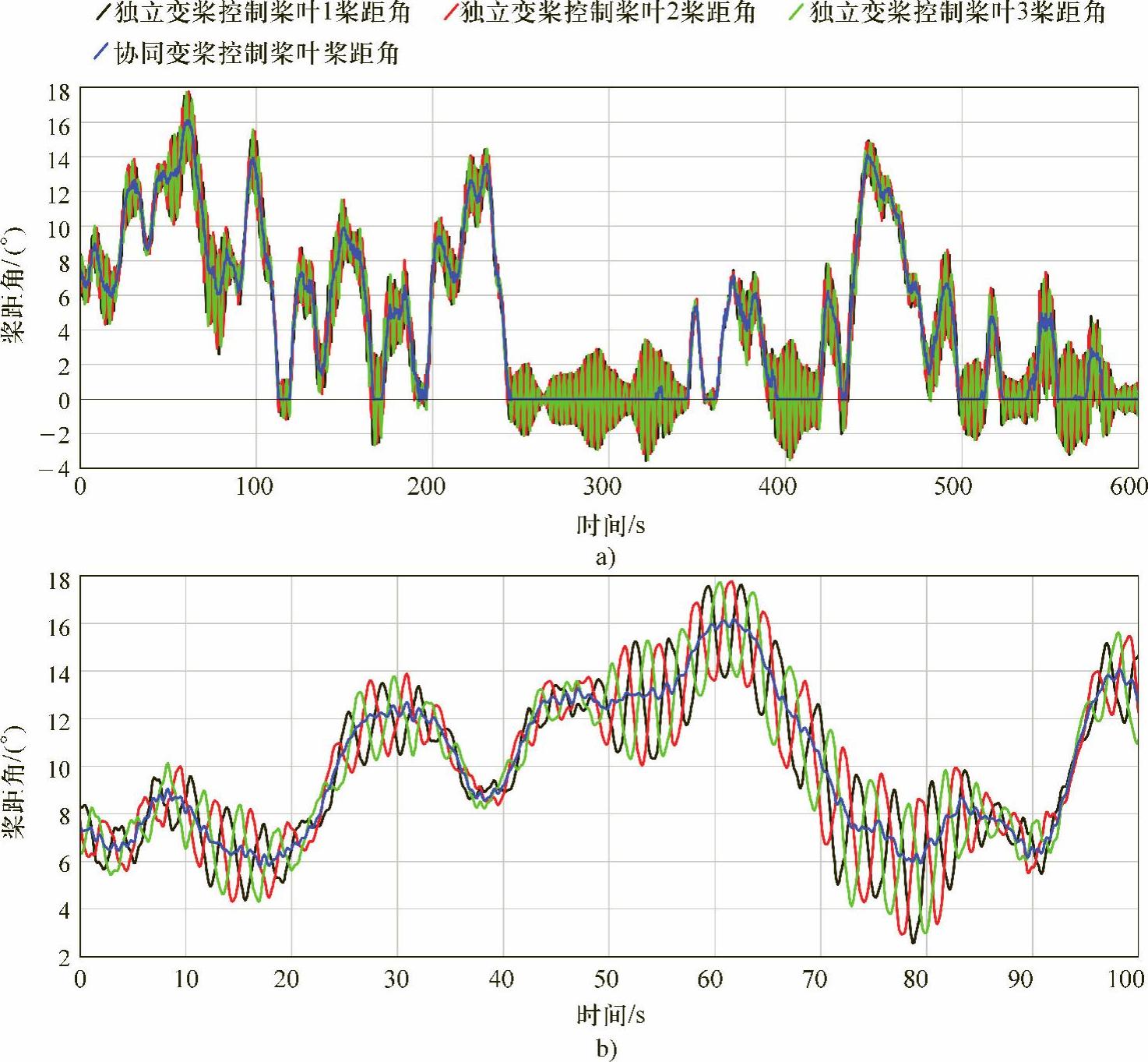
图7-21 独立变桨控制(IPC)和协同变桨控制(CPC)桨距角比较(平均风速12m/s) (彩图见封三)
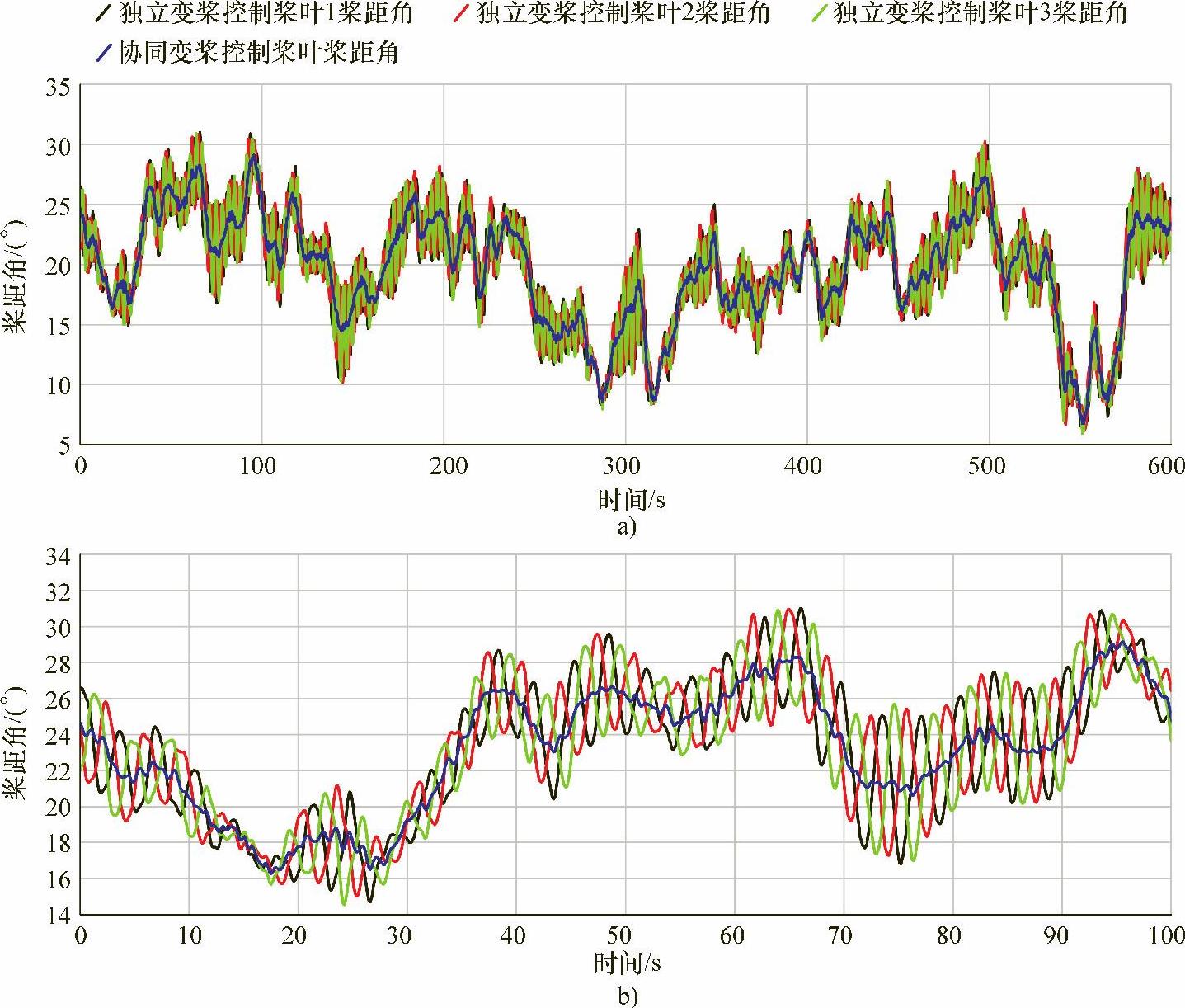
图7-22 独立变桨控制(IPC)和协同变桨控制(CPC)的桨距角比较(平均风速20m/s) (彩图见封三)
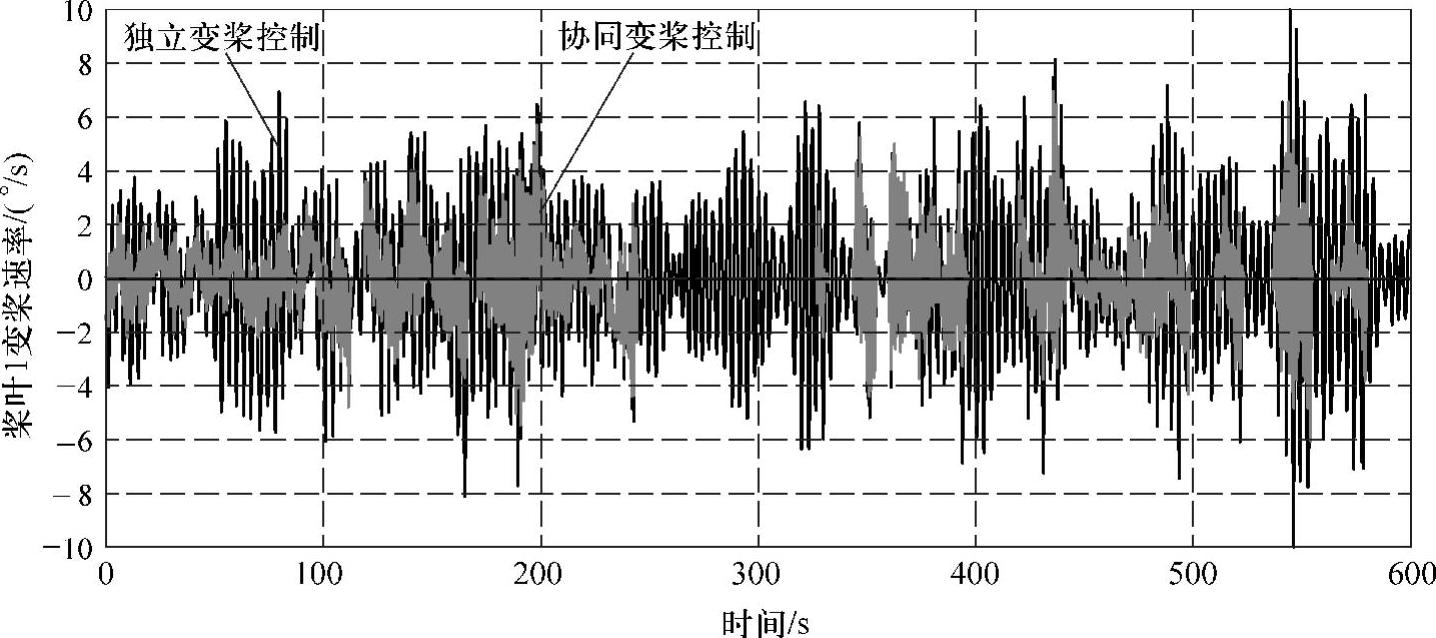
图7-23 独立变桨控制(IPC)和协同变桨控制(CPC)变桨速率比较(平均风速12m/s)
图7-23、图7-24分别是12m/s、20m/s平均风速湍流风工况下,采用独立变桨控制(IPC)和采用协同变桨控制(CPC)的变桨速率比较。从图中可以知,采用独立变桨控制(IPC)后,变桨速率增加较多,即变桨更频繁了,这就会加7剧变桨轴承和变桨减速机的磨损,增加变桨电机的发热。
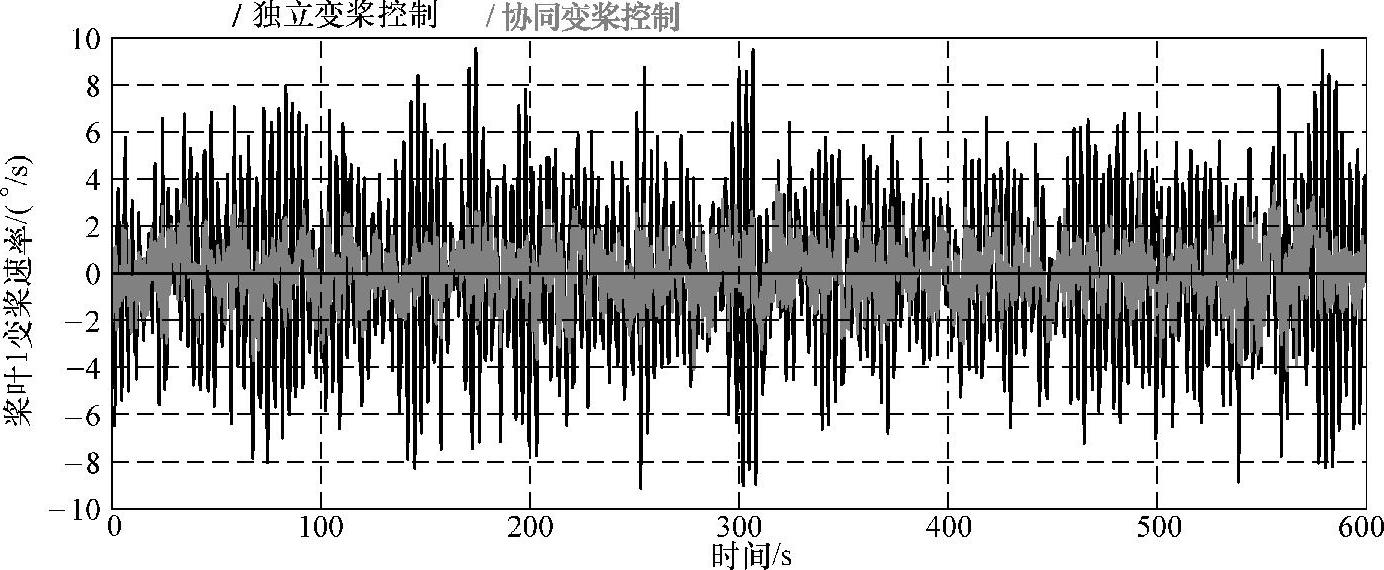
图7-24 独立变桨控制(IPC)和协同变桨控制(CPC)的变桨速率比较(平均风速20m/s)
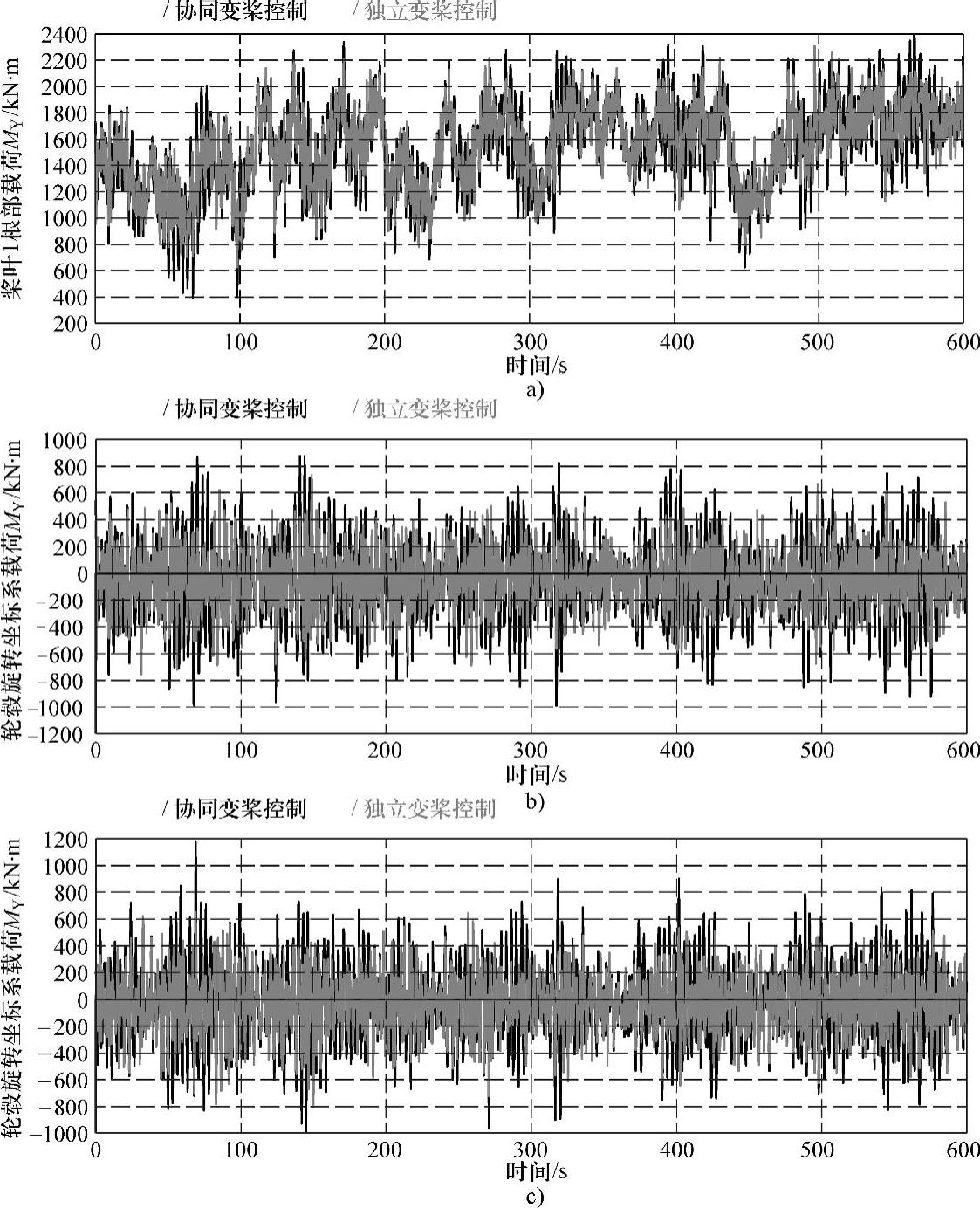
图7-25 独立变桨控制(IPC)和协同变桨控制(CPC)控制效果比较(平均风速12m/s)
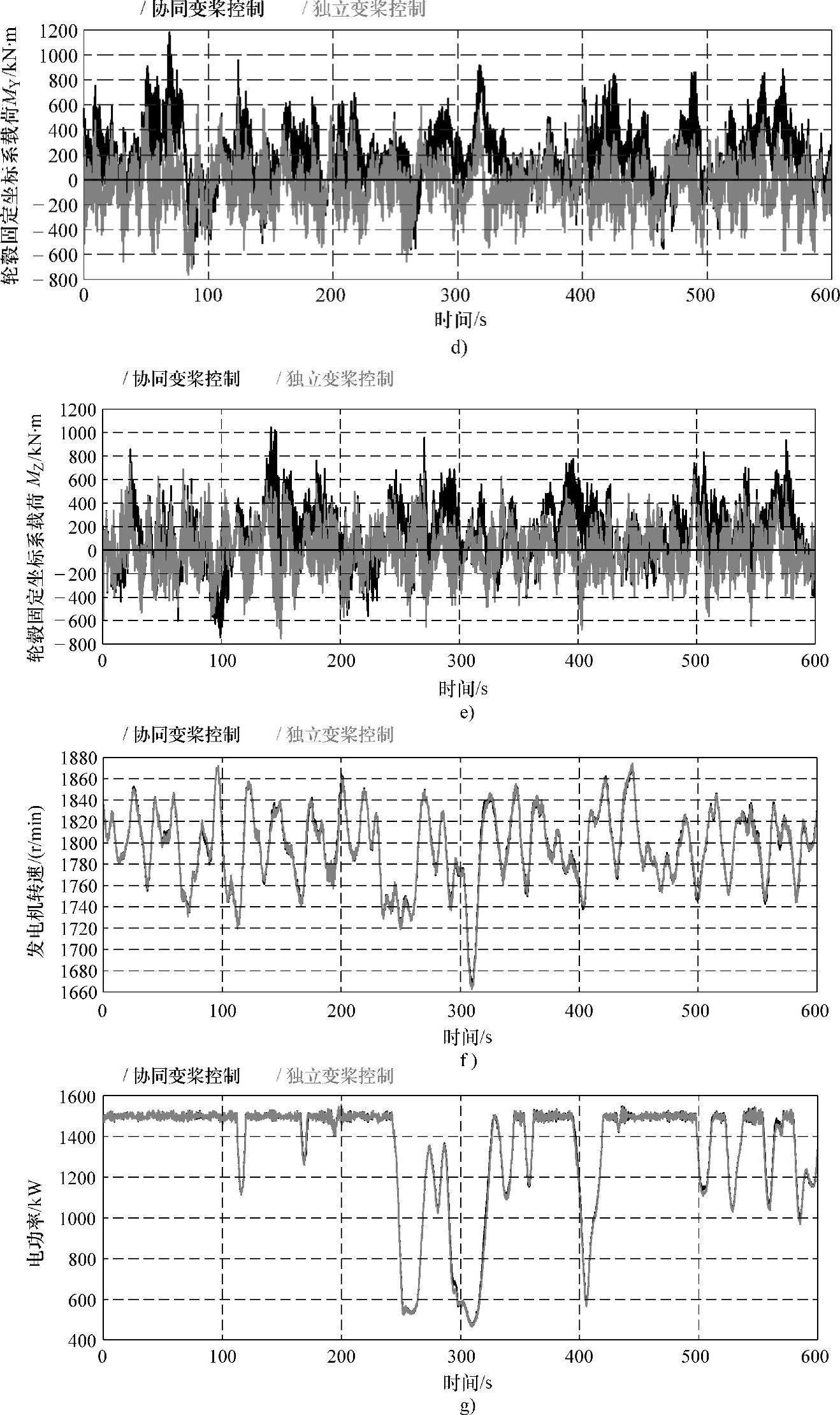
图7-25 独立变桨控制(IPC)和协同变桨控制(CPC)控制效果比较(平均风速12m/s)(续)(https://www.xing528.com)
图7-25、图7-26分别是12m/s平均风速湍流风工况下,采用独立变桨控制(IPC)和采用协同变桨控制(CPC)的控制效果比较,分别比较了桨叶根部载荷(Blade 1 MY)(见图a)、风轮旋转坐标系载荷(Rotating hub MY和MZ)(见图b、c)、轮毂固定坐标系统载荷(Stationary hub MY和MZ)(见图d、e)、发电机转速(见图f)、发电机功率(见图g)。从图可知,采用独立变桨控制(IPC)后,桨叶根部载荷、风轮旋转坐标系载荷、轮毂固定坐标系统载荷都有明显减小,效果显著。而发电机转速和发电机功率几乎不变。
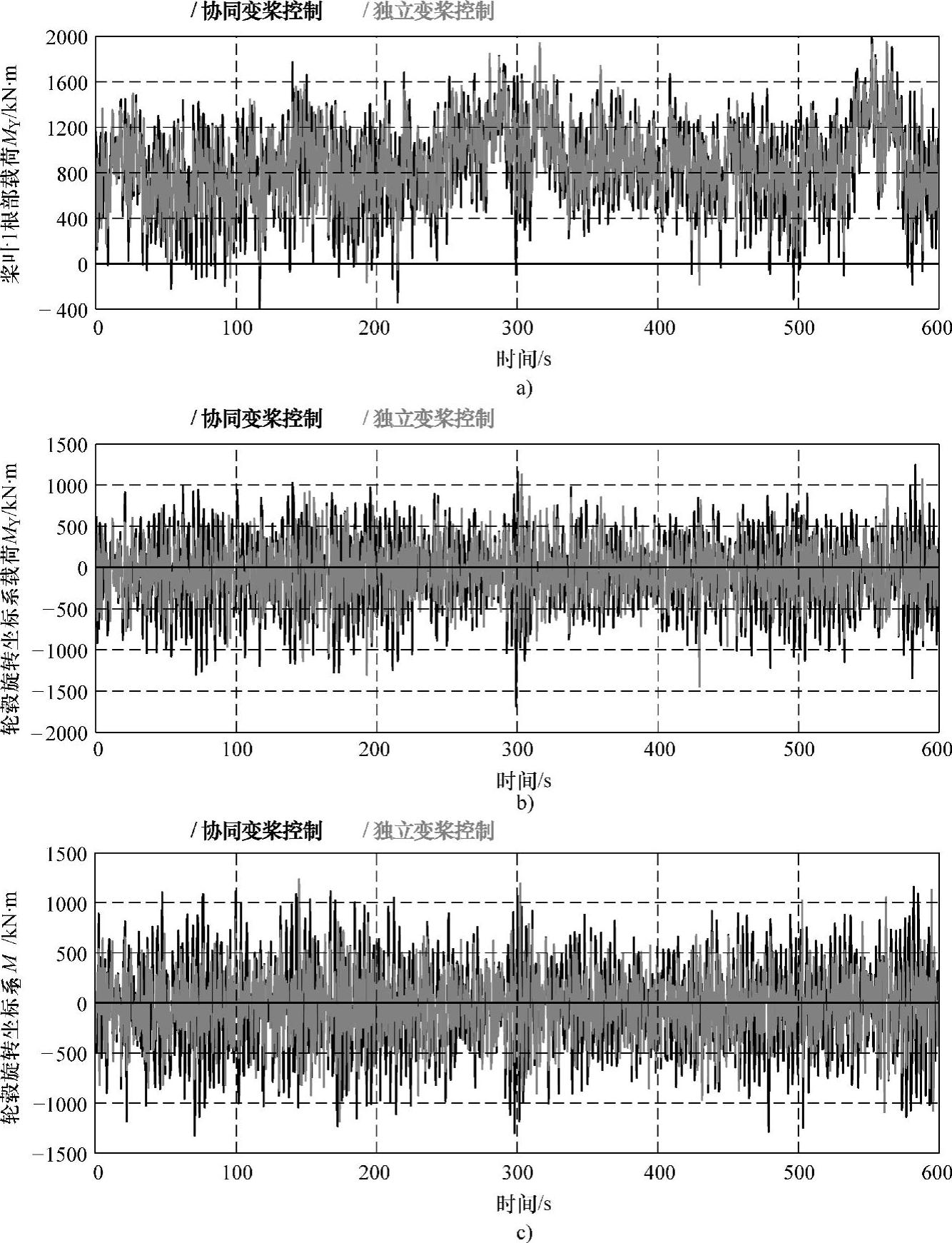
图7-26 独立变桨控制(IPC)和协同变桨控制(CPC)控制效果比较(平均风速20m/s)
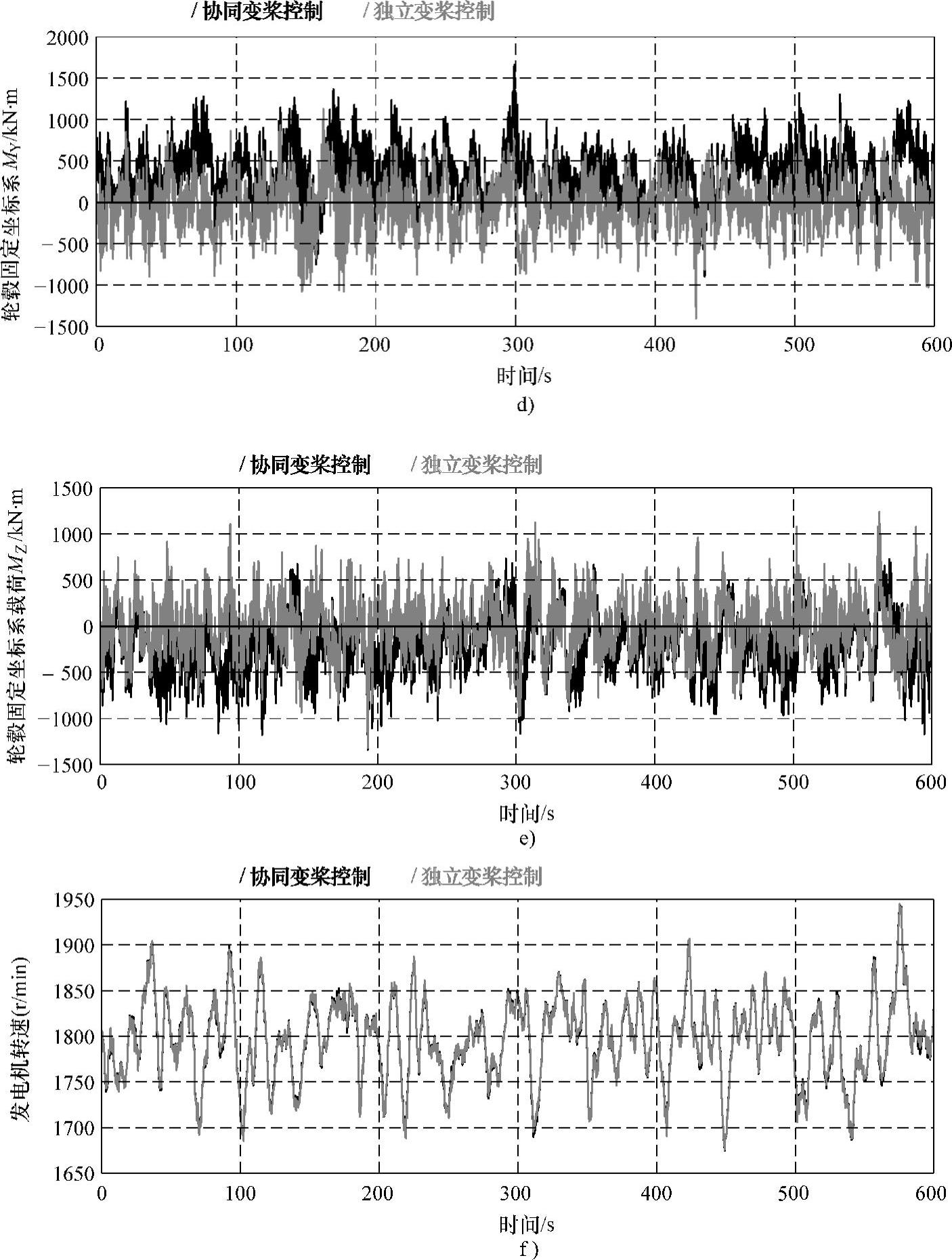
图7-26 独立变桨控制(IPC)和协同变桨控制(CPC)控制效果比较(平均风速20m/s)(续)
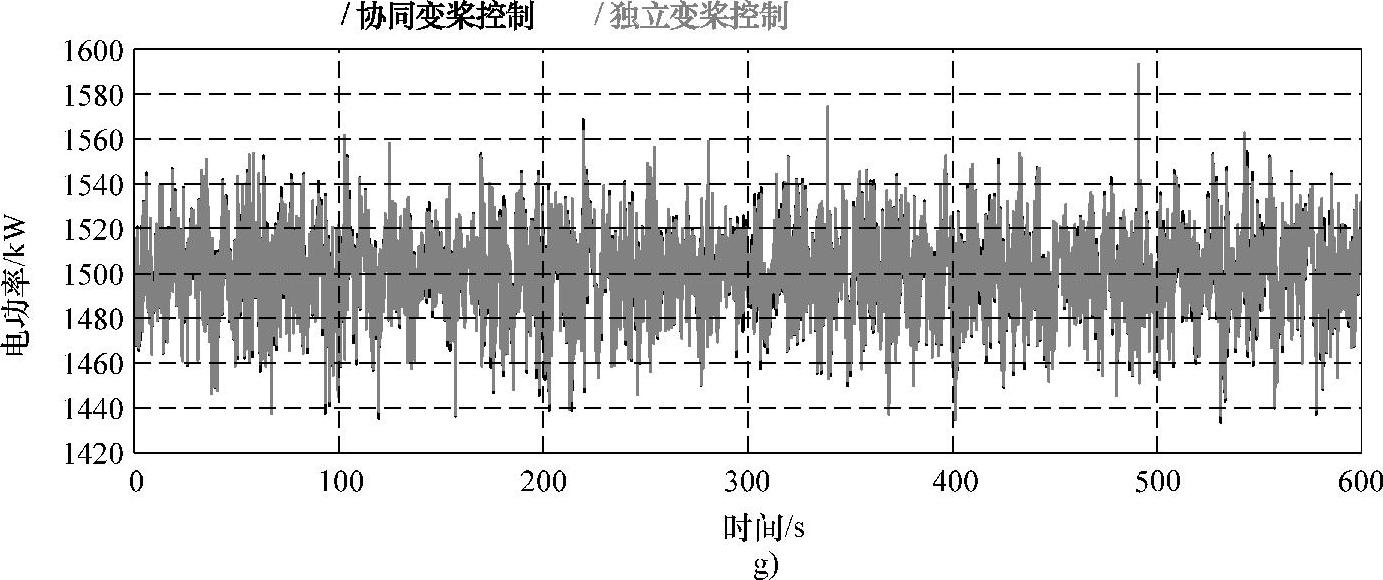
图7-26 独立变桨控制(IPC)和协同变桨控制(CPC)控制效果比较(平均风速20m/s)(续)
图7-27是从频域上分析采用独立变桨控制(IPC)和采用协同变桨控制(CPC)的控制效果差异。图中分别分析了桨叶根部载荷(Blade 1 MY)(见图a)、风轮旋转坐标系载荷(Rotating hub MY)(见图b)、轮毂固定坐标系统载荷(Stationary hub MY)(见图c)和变桨速率在频域上差异(见图d、e)。从图中可知,采用独立变桨控制(IPC),主要减少了桨叶根本载荷和风轮旋转坐标系载荷的1P(风轮转频)分量;主要减小了轮毂固定坐标系统载荷的低频分量(表示平均值);主要增加变桨速率1P(风轮转频)分量。
综上所述,采用独立变桨控制可以有效减小叶片根部载荷MY、风轮旋转坐标系载荷MY与MZ波动(1P谐波分量),同时还可以减小轮毂固定坐标系载荷MY与MZ的平均值,即可以减小风轮上的不均衡载荷。仿真结果还表明,且采用独立变桨控制基本上不影响发电机转速和功率的控制效果,即不影响协同变桨控制的功能。但采用独立变桨增加了变桨动作幅值和速率,且增加的变桨速率较多,这就会加剧变桨轴承和变桨减速机的磨损,增加变桨电机的发热。
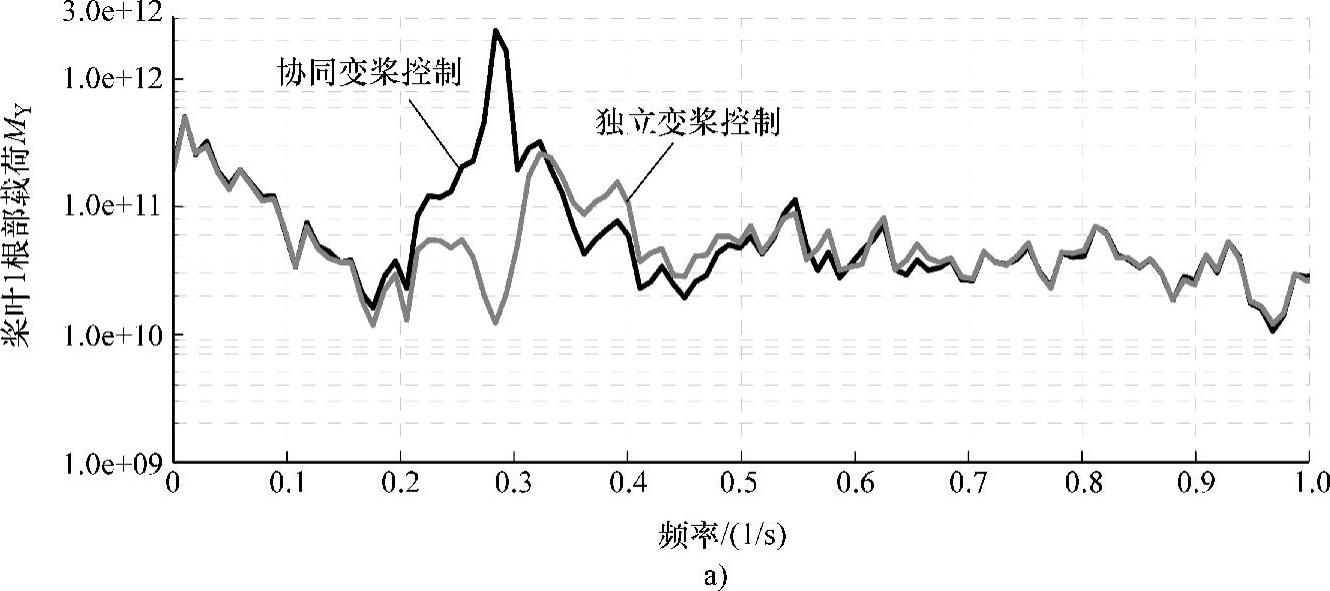
图7-27 独立变桨控制(IPC)和协同变桨控制(CPC)频域比较分析
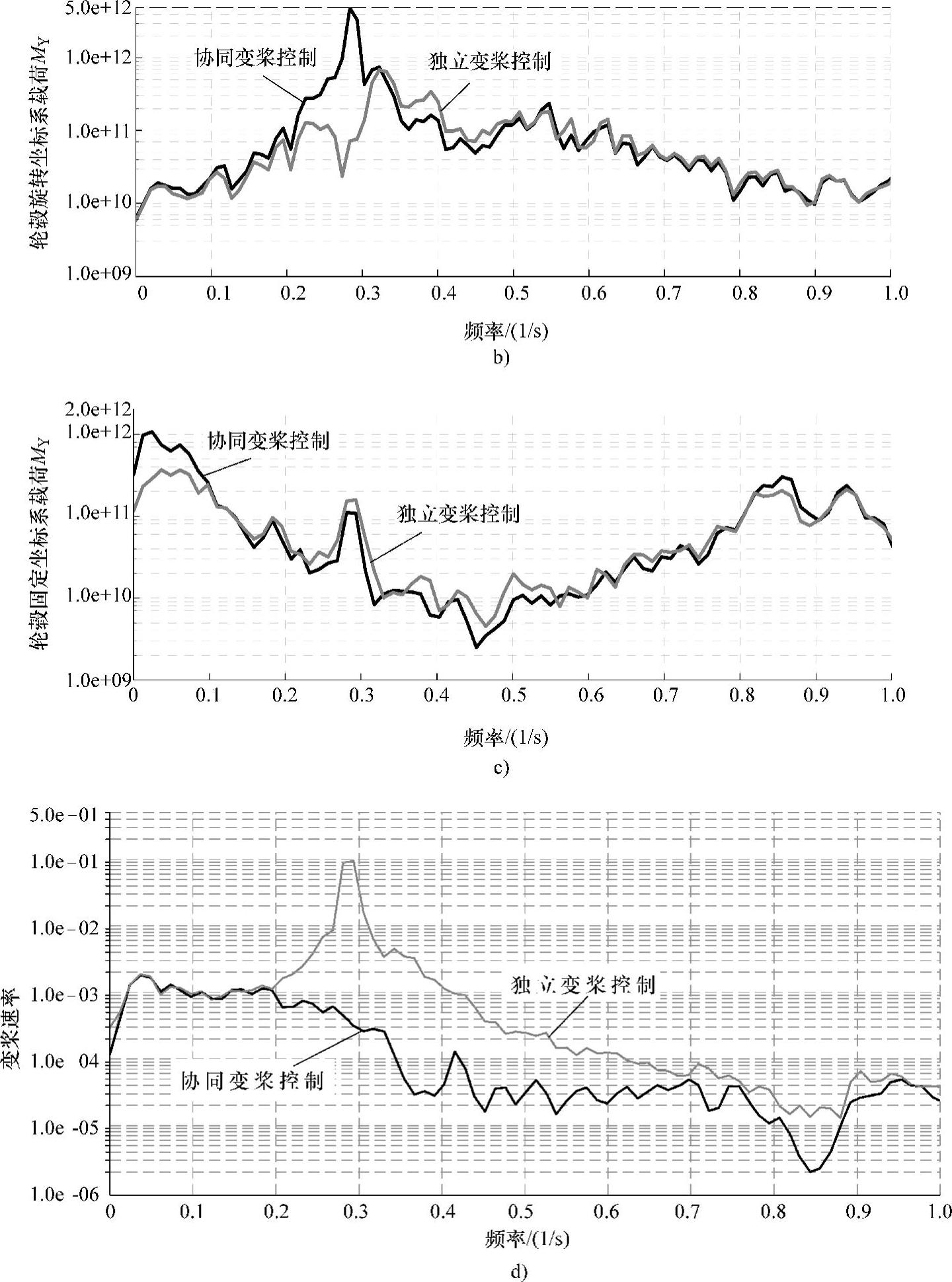
图7-27 独立变桨控制(IPC)和协同变桨控制(CPC)频域比较分析(续)
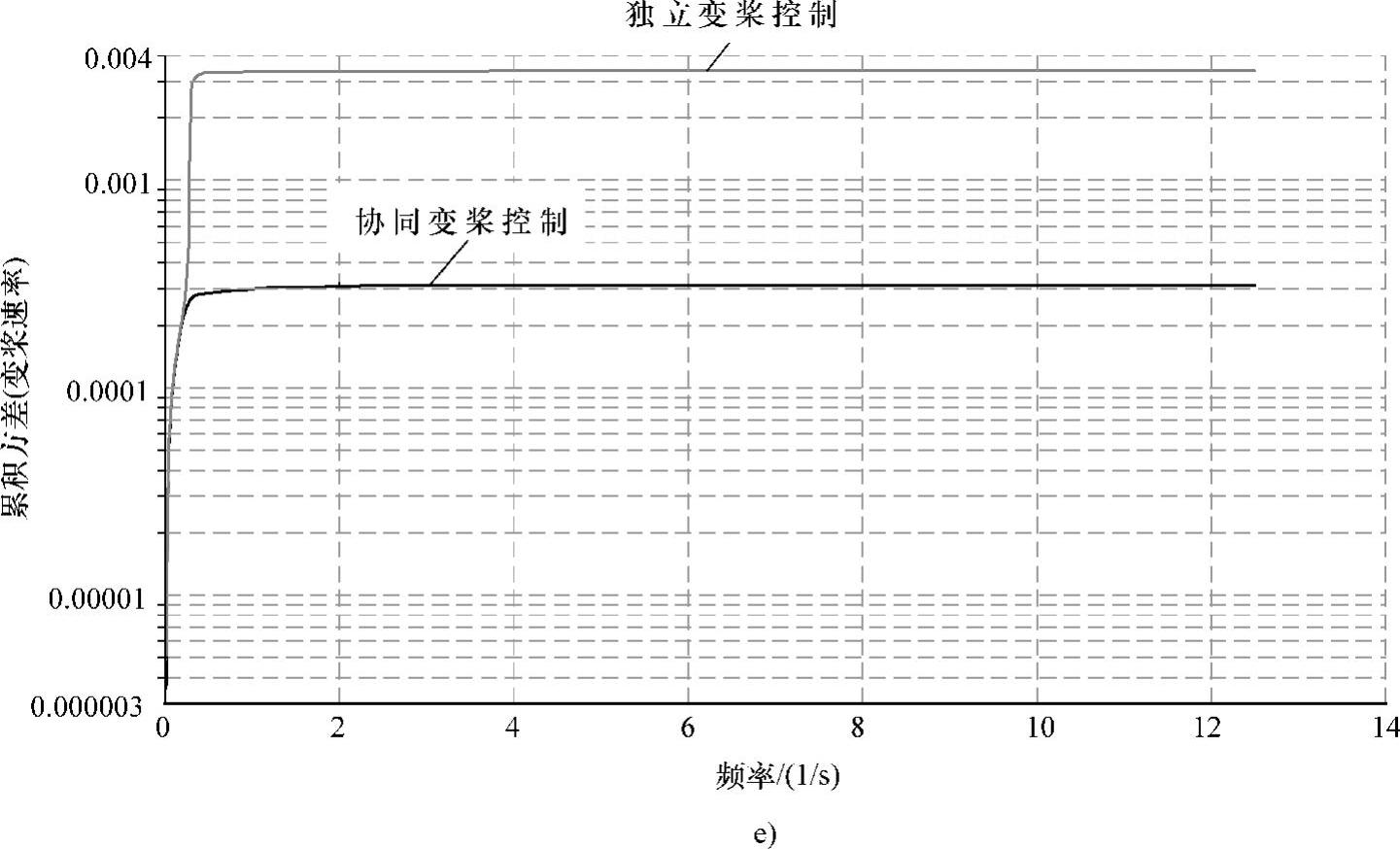
图7-27 独立变桨控制(IPC)和协同变桨控制(CPC)频域比较分析(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。