



1.确定总体方案
大型风电机组独立变桨技术可以通过实时测量叶根载荷、主轴载荷、轮毂载荷或者塔顶载荷等来实现。但从技术成熟度及工艺等方面来权衡考虑,可选择通过测量三桨叶叶根载荷来实现独立变桨控制的技术方案。
独立变桨控制系统由叶片根部载荷传感器、信号采集与传输装置、集电环、编码器、三套变桨驱动系统、主控制器等组成。图7-16所示为叶片根部载荷测量与传输的示意图。
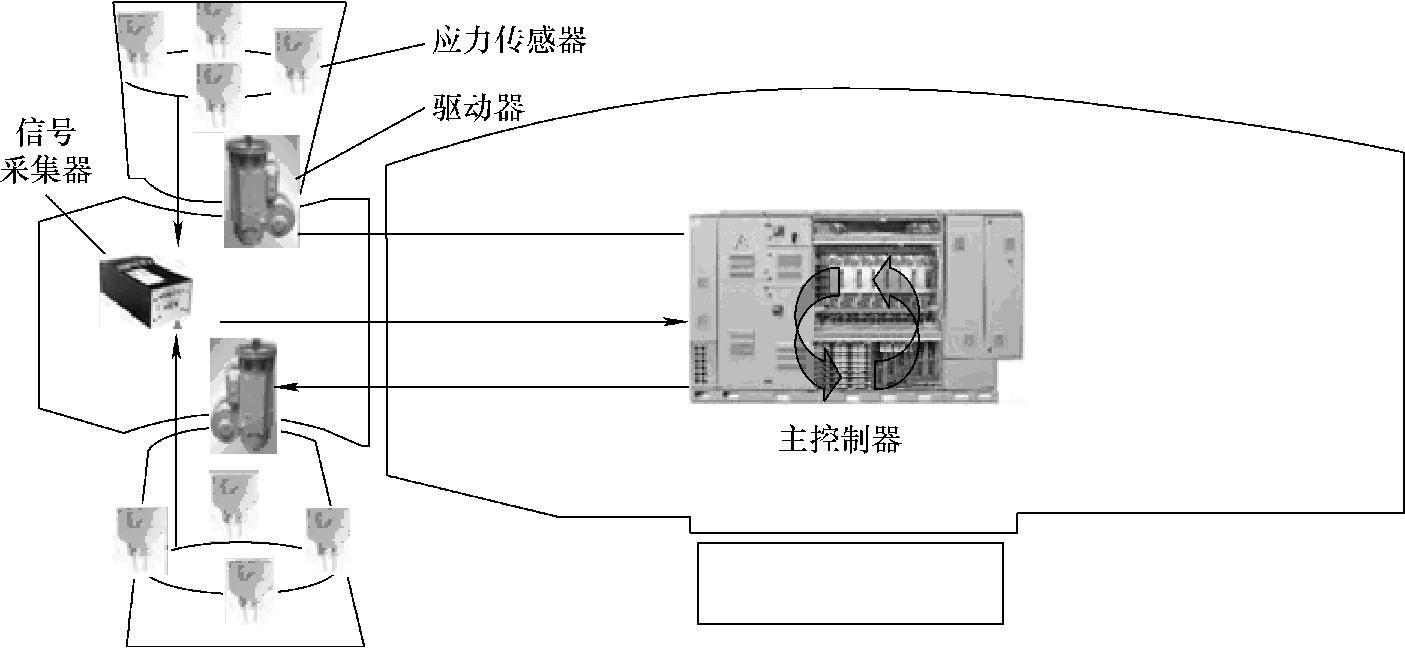
图7-16 基于叶片根部载荷测量的独立变桨控制硬件示意图
独立变桨控制系统叶片根部载荷传感器的选择与安装见第十一章第一节。
2.风轮方位角测量
根据前面几个章节分析可知,要实现独立变桨控制,需要实时测量风轮的方位角,本方案通过安装在集电环上的绝对值编码器测量风轮的方位角,并以桨叶1垂直向上的位置作为风轮方位角的参考零位(见图7-17)。
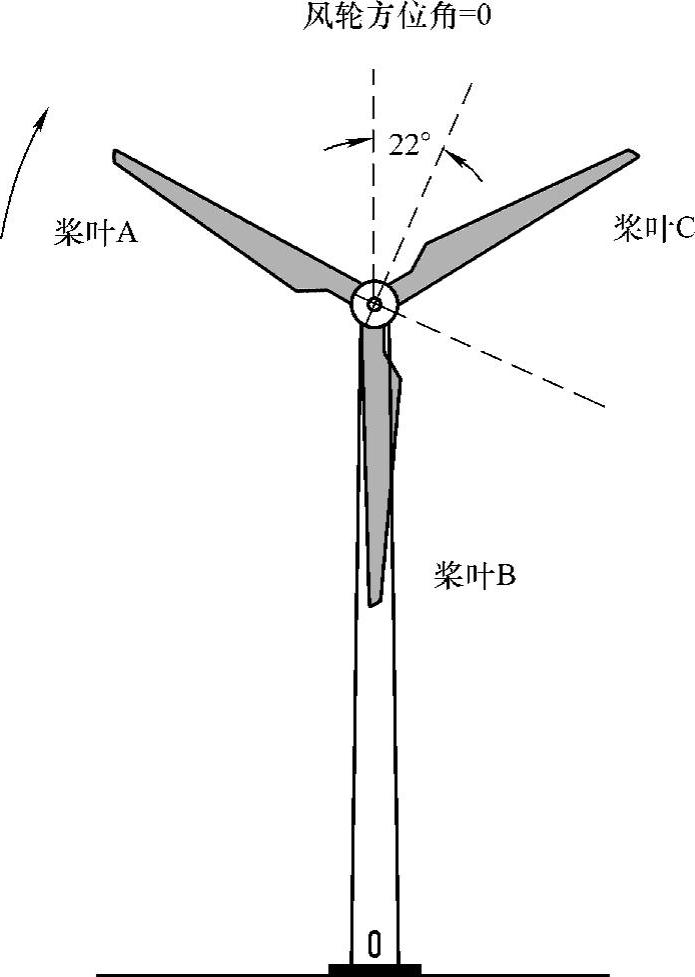
图7-17 风轮方位角的定义
3.变桨系统(https://www.xing528.com)
独立变桨控制要求每个桨叶在轮毂里都有各自的执行机构,因此必须向旋转的轮毂输送动力来驱动执行机构。变桨系统的主要驱动方式是电动机驱动方式。图7-18所示是典型的电动变桨系统三维图。由于电动变桨驱动方式易于实现复杂、快速的控制目的,可靠性高,比液压变桨更为普遍。
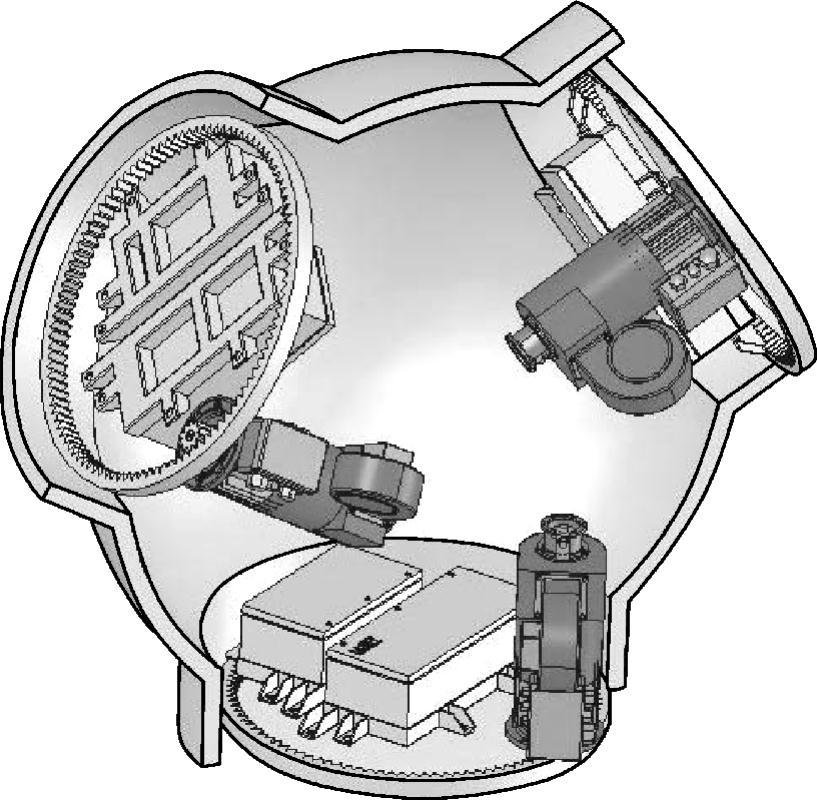
图7-18 电动变桨系统三维图
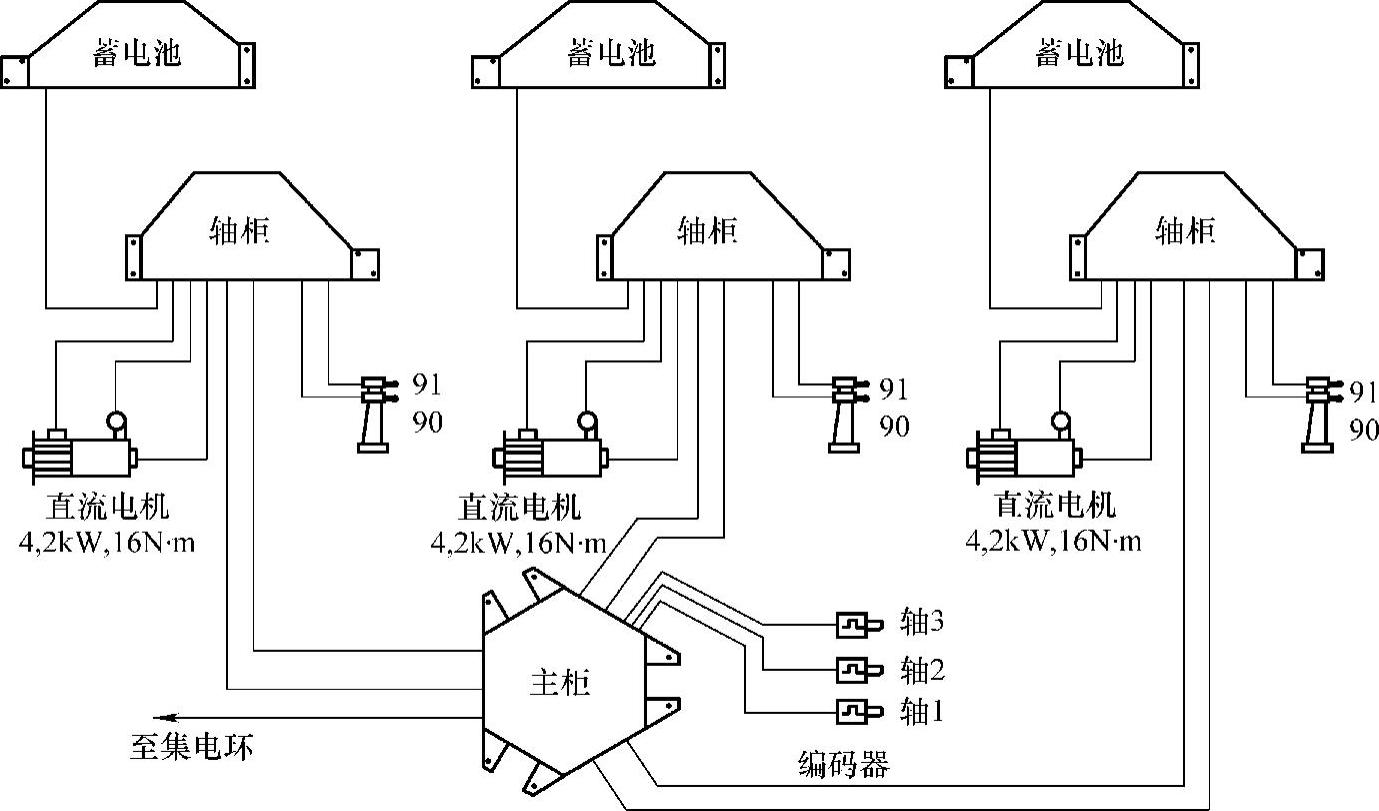
图7-19 电动变桨系统的组成
图7-19所示是典型的1500kW变速恒频风电机组电动变桨系统的组成,每个桨叶采用一个带位移反馈的伺服电动机进行单独调节,位移传感器采用两个编码器,分别安装在变桨齿轮侧和电动机输出轴上进行冗余测量,采集和计算桨距角。伺服电动机通过主动齿轮与桨风轮毂内齿环相连,带动桨叶进行转动,实现对桨距角的直接控制。内齿环与一个塑料小齿轮啮合,带动编码器直接测量桨距角。变桨控制是依据安装在发电机后方输出轴上的编码器所测的位移值进行控制的,以变桨齿轮编码器作为冗余控制的参考值,它直接反映的是桨距角的变化。当发电机输出轴、减速器或编码器出现故障时,即两个编码器所测数字不一致时,则控制器便可知道系统出现了故障。
独立变桨系统的主要功能就是根据控制系统合成的变桨速度和位置指令驱动各个桨叶转动到指定桨距角位置。除此以外,变桨系统应能建立与风电机组控制系统的通信,能在与控制系统的联系出现故障或者变桨驱动器故障的情况下执行安全的顺桨停机,能对自身的运行状况进行监控,能对后备电源进行充放电和状态监测。电动变桨控制系统由一个主控制柜和三个轴向控制柜组成,其外部给定信号和内部控制信号的联系如图7-20所示。
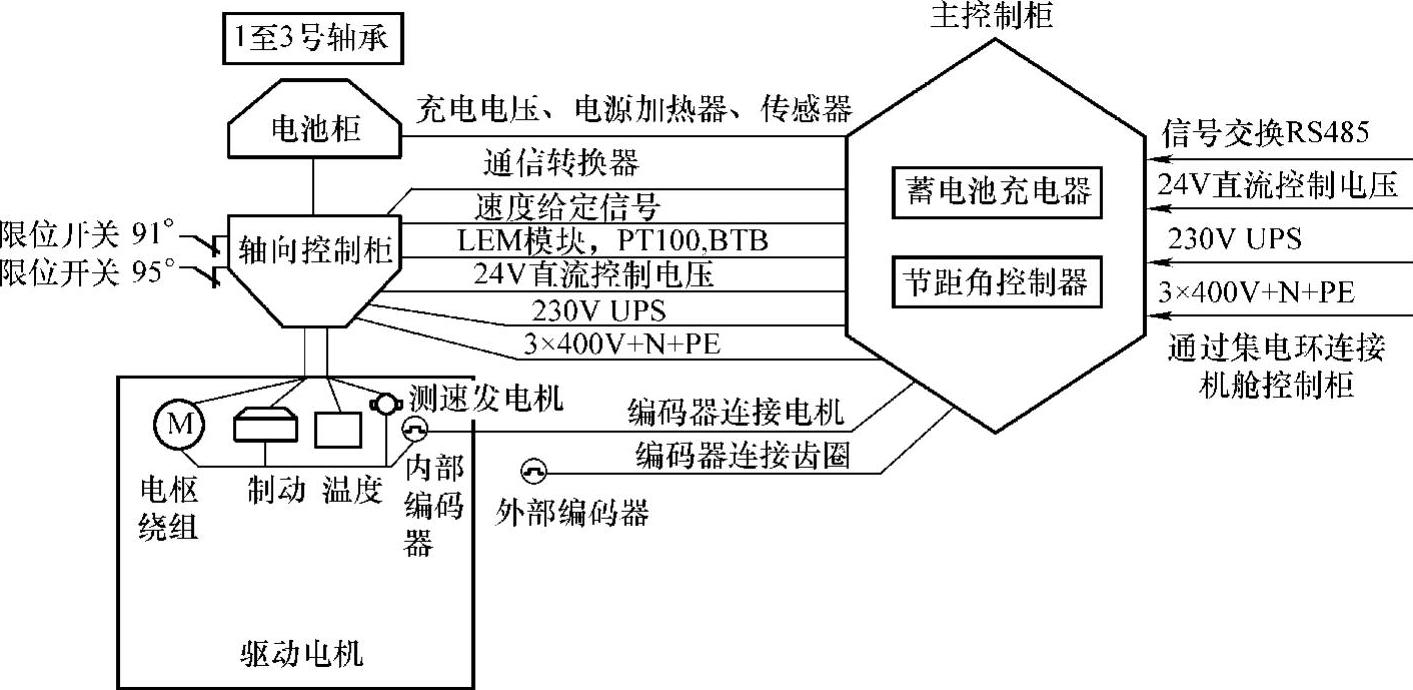
图7-20 电动变桨驱动系统的控制信号联系
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。