



根据独立变桨控制理论分析可知,独立变桨控制过程包括协同变桨控制过程和偏差变桨控制过程。图7-4所示为独立变桨控制框图。如图所示,独立变桨控制各桨叶期望节距角βi为协同变桨的期望节距角βc与偏差变桨的期望节距角β′i之和。

图7-4 独立变桨控制框图
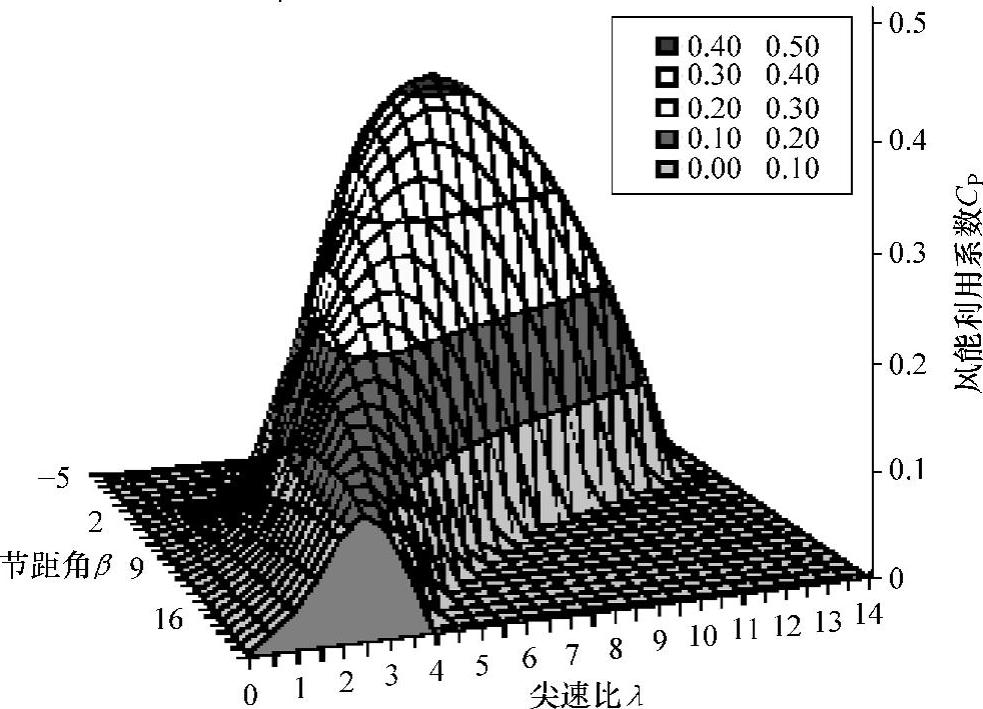
图7-5 风能利用系数与尖速比、节距角之间的关系
1.协同变桨过程
协同变桨控制过程分为低于额定风速和高于额定风速两种工况:
在风速较小,发电机的输出功率未达到额定功率前,应尽可能将风能转化为输出的电能。从图7-5上看,在桨叶节距角β=0°时,CP相对最大。因此协同变桨控制过程就是始终保持桨叶节距角β=0°。而当尖速比为λopt时,风能利用系数为最大CPmax。因此通过变速恒频技术,根据风速相应控制风轮转速,使风力机始终运行在最佳尖速比λopt附近,这样就可以使发电机工作在最佳功率状态。在这个控制过程中,不断追踪最佳功率曲线实际上就是要求风能利用率CP恒定为CPmax,也可称此过程为恒CPmax控制过程。
当风速增加到使得发电机的输出功率增加到额定功率附近时,由于风力发电机组的机械和电气极限要求转速和输出功率维持在限定值以下。从图7-5可以看出,增大桨叶节距角,风能的利用率明显减小,发电机的输出功率也相应减小。因此当发电机输出功率大于额定功率时,通过调节桨叶节距角,减小发电机的输出功率使之维持在额定功率;当输出功率降到小于额定功率时,通过调节桨叶节距角,增大输出功率。
2.偏差变桨过程
偏差变桨控制的控制目标是减小风轮上的不平衡载荷,即减小轮毂中心倾覆力矩Mtilt和偏航力矩MYaw。根据上述分析可知:
 (https://www.xing528.com)
(https://www.xing528.com)
把风速vi、方位角φi作为控制器的干扰量,节距角βi作为控制量,Mtilt和MYaw作为输出量(反馈量)。那么式(7-39)表示的是一个多变量输入输出的系统,因此不能直接用经典PID控制器来实现控制功能,而需要用现代控制理论来设计复杂的控制器。但风力机的精确建模比较困难,用现代控制理论设计控制器比较难实现,且实用性差。
用Park变换对式(7-39)进行变换。选用的Park变换P和逆变换P-1为
对叶片根部载荷MYi、节距角βi、风速viPark变换得到:

式中,βcmi、vcmi、McmYi分别为Park变换后的节距角、风速、载荷。
把式(7-42)和式(7-43)代入式(7-39),可得

观察式(7-45),把Park变换后的风速v2cm、v3cm作为干扰量,把Park变换后的节距角β2cm、β3cm作为控制量,Mtilt和MYaw作为输出量(反馈量),那么式(7-45)表示为两个单输入单输出线性系统,因此可以用经典控制理论分别设计两个控制器。考虑到轮毂倾翻力矩和偏航力矩直接测量比较困难,通过测量叶片根部载荷,根据式(7-44)和式(7-45)间接计算出轮毂倾翻力矩和偏航力矩。而控制量β2cm、β3cm需通过Park逆变换,变换为实际偏差变桨的控制量βi。
因此,偏差变桨控制过程为,载荷传感器测量出各叶片根部载荷,并送给主控制器,主控制器按式(7-45)对叶片根部载荷进行Park变换,计算出倾翻力矩和偏航力矩,倾翻力矩和偏航力矩分别经控制器得到Park变换坐标上的节距角,然后再经Park逆变换得出偏差变桨期望的节距角。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。