



【摘要】:由于计算机实时控制过程中采样信号的离散性,设计控制系统时最终要将连续条件下设计的控制系统离散化。图6-6 包含实际采样信号的采样数据控制系统框图图6-6中,带有星号的变换表示经过周期为T的序列脉冲的采样。双线性变换法的一个优势是相对容易实现,相比于精确z域传递函数的响应来说,双线性变换法的z域传递函数响应的精度要好,即随频率增加,精度也增加。
由于计算机实时控制过程中采样信号的离散性,设计控制系统时最终要将连续条件下设计的控制系统离散化(见图6-5)。
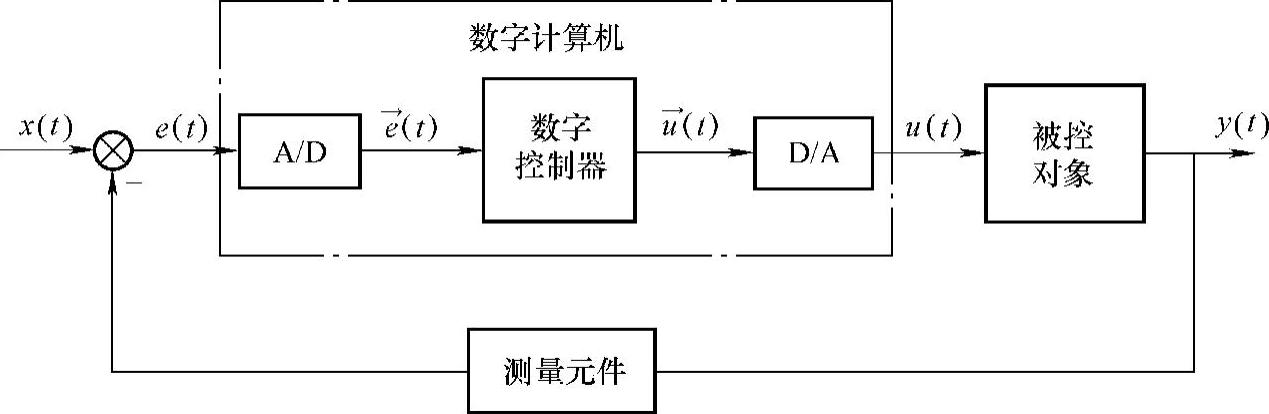
图6-5 数字控制系统原理结构图
采样可能发生在系统的一个或多个位置,在框图中采样操作可被表示为开关符号,如图6-6所示。
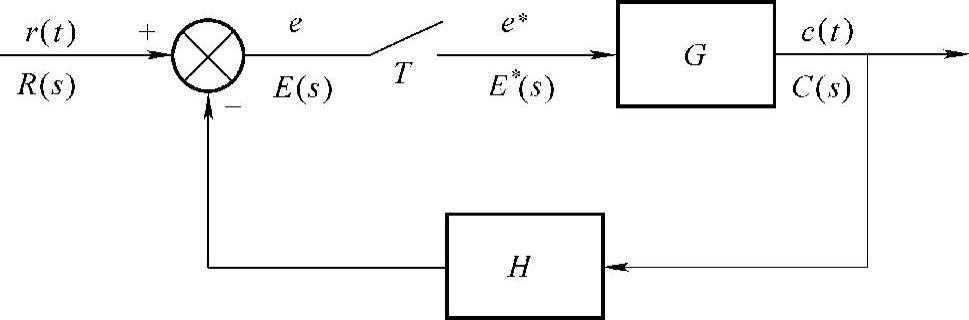
图6-6 包含实际采样信号的采样数据控制系统框图
图6-6中,带有星号的变换表示经过周期为T的序列脉冲的采样。该系统方程为
C(s)=G(s)E∗(s) (6-33)
E(s)=R(s)-B(s)=R(s)-G(s)H(s)E∗(s) (6-34)
式(6-34)的星变换为
E∗(s)=R∗(s)-GH∗(s)E∗(s) (6-35)
将式(6-35)的结果代入式(6-33),有

式(6-36)的星变换为(https://www.xing528.com)

于是,可将式(6-37)改写为离散形式,即

除上述方法外,还可以采用双线性变换法实现s到z平面的变换,其原理为以z表示s,产生z的函数,进而得到这种变换的线性近似,即

将自然对数lnz展开成级数为

式中

仅使用式(6-40)的第一项,产生双线性变换,有

s的表达式能够插入到一个函数中,如G(s),它代表一个连续时间函数,将表达式有理化,就产生函数G(z),它代表一个离散函数。
双线性变换法的一个优势是相对容易实现,相比于精确z域传递函数的响应来说,双线性变换法的z域传递函数响应的精度要好,即随频率增加,精度也增加。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。