



在得到风电机组的线性化模型后,就可以用经典控制理论来指导系统的设计。对额定风速以下的变速风电机组,根据转矩指令进行控制的PI转速控制器会非常缓慢和柔和,线性化的模型可以非常简单,但必须包含传动链的动态特性,而其他的动态特性通常并不重要。对于变桨控制,风轮的气动特性以及一些结构的动态特性是非常关键的,因此在设计变桨控制器的线性化模型时至少应该包含以下动态特性:
1)传动链的动态特性;
2)塔架的前后振动;
3)功率或转速传感器的响应;
4)变桨执行机构的响应。
对于定桨恒速风电机组来说,还需考虑发电机的特性;而对于变速恒频风电机组来说,传动系统的扭振需要特别考虑。一般来说,还需要对风轮的空气动力学特性进行线性化描述,例如,转矩和推力对于桨距角、风速和风轮转速的偏微分方程组。由于推力影响塔架动态特性,它与变桨控制有强耦合作用,因此推力也是需要控制的变量。
图6-1所示是一个典型的风电机组线性化模型。对于这样一个线性化模型,可以通过改变它的增益和其他参数,迅速得到一系列的测试结果,从而评估控制器性能。有些测试是开环测试,可以通过断开反馈环节获得。
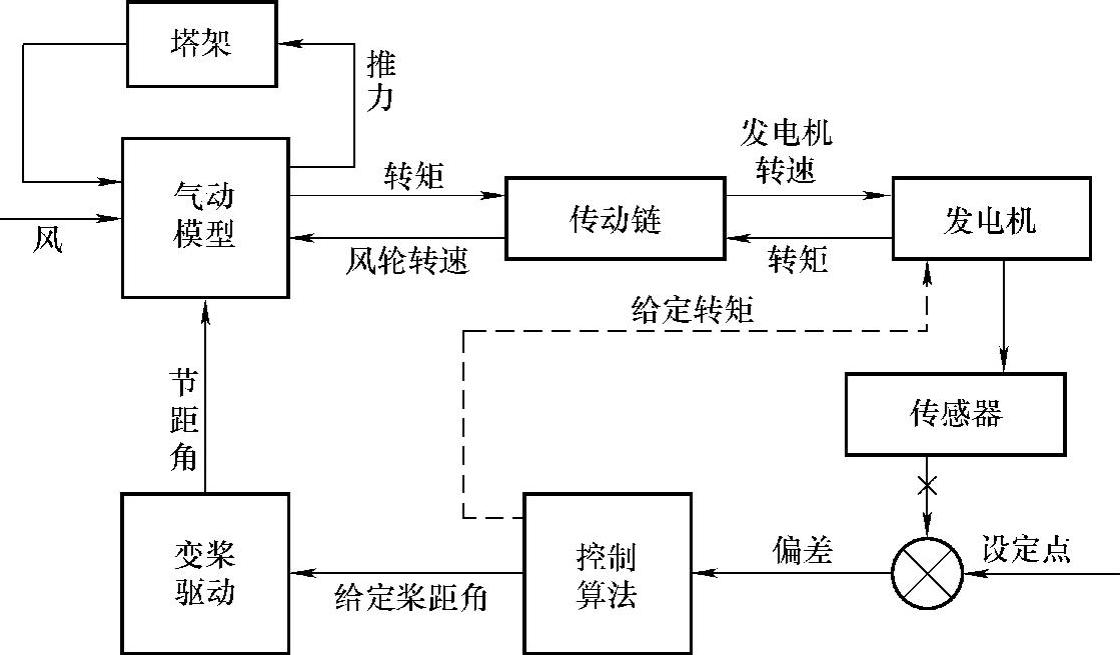
图6-1 典型的风电机组线性化模型
变桨或变速控制功能的实现,采取反馈控制形式。在实现过程中,又往往在局部添加串联校正,以调整具体控制功能的时域和频域指标。
在控制系统的设计中,采用的设计方法一般依据性能指标的形式而定。如果系统的性能指标是以稳态误差、峰值时间、最大超调量和过渡过程时间等时域特征量给出,采用根轨迹法对系统进行综合与校正是比较方便的;如果系统的性能指标是以相角裕度、幅值裕度、谐振峰值、谐振频率、系统闭环带宽和静态误差系数等频域特征量给出,采用频率特性法对系统进行综合与校正是比较方便的。因为在伯德图上,把校正装置的相频特性和幅频特性分别与原系统的相频特性和幅频特性相叠加,就能清楚地显示出校正装置的作用。反之,将原系统的相频特性和幅频特性与期望的相频特性和幅频特性比较后,就可得到校正装置的相频特性和幅频特性,从而获得满足性能指标要求的校正网络有关参数。
风电机组的转矩控制器所要做的是以控制转矩来控制转速,而变桨控制器的控制目标则是以控制桨距角来控制功率,本身它们所面对的就是一个复杂的控制对象,在加入了各种滤波器后对其稳定性不可避免地产生新的影响,为维持系统稳定,必须在控制系统中施加一些控制校正环节,如反馈校正、超前校正和滞后校正。
(一)评价指标
控制系统中参数的选择通常是一个重复的过程,需要经过大量的试探和失败,在每次重复试验后需要对控制器性能进行估计。性能评估主要包括以下几方面的内容:
(1)开环频率响应 通过开环频率响应计算增益和相角裕度,可以给出闭环系统的稳定性指标。如果裕度太小,系统会趋于不稳定。当开环系统对于达到单位增益时具有180°的相位滞后,则系统会变得不稳定,相角裕度给出了实际系统的开环增益在单位增益时的相角和180°之间的差值。尽管没有标准的规定,通常推荐45°的相角裕度。类似地,增益裕度表示当开环相角穿越-180°时的开环增益,通常推荐至少有几分贝的增益裕度。
(2)穿越频率 开环增益为单位增益时的频率,是测量控制器响应的重要参数。
(3)闭环系统的极点位置 它是调整各种谐振的阻尼依据。
(4)闭环阶跃响应 通过系统对于风速的阶跃响应,显示控制器的效力。例如,调试变桨控制器时,风轮转速和功率偏差应当迅速平滑地变为零,塔筒的振动应该很快地衰减,桨距角应平滑地改变为新的数值,并且不会产生过大的超调和振荡。
(5)闭环系统的频率特性 闭环系统的频率特性同样给出了一些重要的指标,如在变桨控制器中:
1)在低频率时,从风速到风轮转速或电磁功率的频率响应必须进行衰减,因为低频率时的风速扰动可以被控制器过滤。
2)在高频率时,从风速到桨距角的频率响应必须进行衰减,并且在一些类似于叶片穿越频率或传动系统的共振频率等关键频率处的频率响应不能过大。
3)从风速到塔架振动速度的频率特性在塔架的共振频率处不会有过大的峰值。
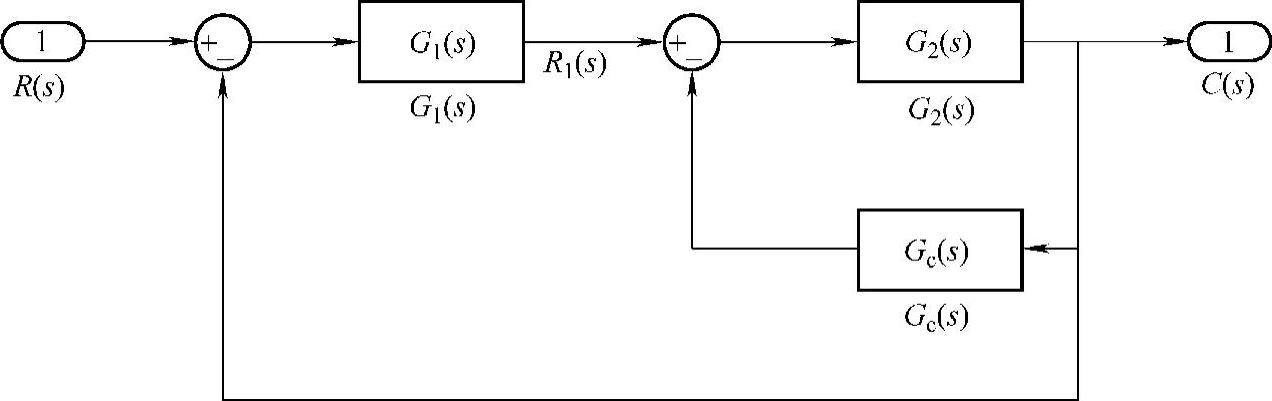
图6-2 反馈校正系统的结构
(二)反馈校正系统[15]
反馈校正系统的结构如图6-2所示,其开环传递函数为

如果在系统动态性能起主要影响的频率范围内,下式成立:
|G2(jω)Gc(jω)|>>1 (6-9)
则式(6-8)可表示为

式(6-10)表明,反馈校正后,系统的特性几乎与被反馈校正装置保卫的环节无关,而当
|G2(jω)Gc(jω)|<<1 (6-11)
时,式(6-8)变成
G(s)≈G1(s)G2(s) (6-12)(https://www.xing528.com)
式(6-12)表明,此时已校正系统与待校正系统特性一致。因此,适当选取反馈校正装置Gc(s)的参数可以使已校正系统的特性发生期望的变化。
反馈控制的基本原理:用反馈校正装置包围待校正系统中,对动态性能改善有重大妨碍作用的某些环节,形成一个局部反馈回路,在局部反馈回路的开环幅值远大于1的条件下,局部反馈回路的特性主要取决于反馈校正装置,而与被包围部分无关。适当选择反馈校正装置的形式和参数,可以使校正系统的性能满足给定指标的要求。
在控制系统初步设计时,往往把条件式(6-9)简化为
|G2(jω)Gc(jω)|>1 (6-13)
这样做的结果会产生一定的误差,特别是在|G2(jω)Gc(jω)|=1的附近。可以证明,此时的最大误差不超过3dB,在工程允许误差范围之内。
反馈控制具有以下明显特点:
1)削弱非线性特性的影响;
2)减小系统的时间常数;
3)降低系统对参数变化的敏感性;
4)抑制系统噪声。
应当指出,进行反馈控制设计时,需要注意内回路的稳定性。如果反馈校正参数选择不当,使得内回路失去稳定,则整个系统也难以稳定可靠地工作,且不利于对系统进行开环调试。因此,反馈校正后形成的内回路,最好是稳定的。
(三)串联校正系统
串联校正系统的结构如图6-3所示,根据传递函数Gc(s)的变化,可以达到串联超前校正和串联滞后校正两种效果。
1.串联超前校正
超前校正装置的主要作用是通过改变伯德图中曲线的形状来产生足够大的超前相角,以补偿原系统中的元件造成的过大的相角滞后。
串联超前校正的基本形式为
 ,其中系数a>1 (6-14)
,其中系数a>1 (6-14)

图6-3 串联校正系统的结构
由此设计串联校正装置的过程如下:
1)根据Gc(jωc)G0(jωc)=1·ej(-180°+γ),可得

2)利用式(6-15)分解为实部、虚部的特性,可以求出未知量a和T的值。

于是,在控制稳定性指标为相角裕度γ和幅值穿越频率ωc的情况下,即可计算得出所期望的串联校正装置参数。
2.串联滞后校正
串联滞后校正的主要作用是在不改变系统动态特性的前提下,提高系统的开环放大倍数,使系统的稳态误差减小,并保证一定的相对稳定性。
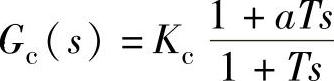
串联滞后校正的基本形式为

可见其表达式与式(6-14)一致,因而也可以利用同样的设计方法,由控制目标决定选择串联滞后校正还是串联超前校正,以及校正装置的参数。
(四)查表法
由图5-5可见,风电机组的额定运行点附近,由于选择了使输出功率最大化的最优桨距角,气动转矩对桨距角的敏感性很小,与风速超过额定风速时相比,这时需要更高的控制器增益。在风速超过额定风速时,桨距角的很小变化就会对转矩产生很大的影响,通常情况下,转矩随桨距角变化的敏感性呈线性变化。因此,可以通过改变控制器的总体增益使其与桨距角成反比的关系来补偿转矩的波动。这种根据运行点对控制器增益进行修正的规则称为增益规则表。但气动推力对桨距角的变化的敏感性则是另一种方式,由于它和变桨控制密切相关并对塔架动态特性造成直接影响,所以需要进一步修改增益规则以保证在所有的风况下获得良好特性。
因此,在额定风速和切出风速之间的几个不同运行点上建立相应的线性化模型是很重要的,并且需要选择一个增益规则表来确保以上的性能在整个运行范围内都能取得令人满意的结果。
除了桨距角的增益表外,按照图5-1中ADGF轨迹运行的机组也可以将轨迹做成数据表预置在控制系统中,以便在运行时进行插值调用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。