



实际的运行中,由于风轮动态特性的影响,如果在额定点C附近的状态只靠变速控制或变桨控制向额定运行点C进行回归将很难使机组的运行状态稳定在C点,这是因为转矩调节和转速调节的效果存在较大的时间差。
那么可取的方法是同时运行两个控制器,其条件是,在远离额定风速时,置其中一个或另一个控制环饱和。因此在大多数时间里还是只有一个控制器处于激活状态,但是在接近额定点时它们可以建设性的相互干预。
有一种算法是在变桨PID控制器中,引入转速误差同时还引入转矩误差项。在额定值以上,由于转矩给定值饱和在额定值,转矩误差为零,但是在额定值以下转矩误差为负值,积分项会使桨距角给定值偏向最优限定值,防止变桨控制器在低风速时动作,而比例项在风速增加很快时有助于在转矩达到额定之前起动变桨。
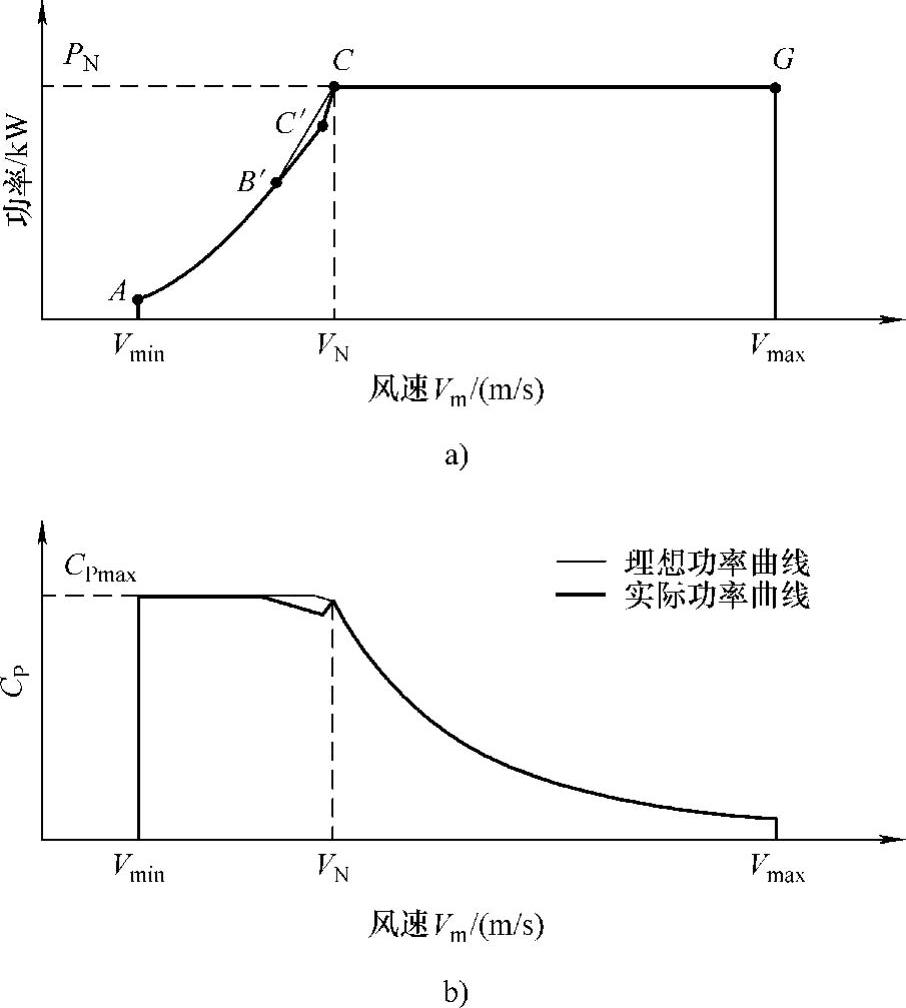
图5-11 变速与变桨分步控制带来的功率损失(https://www.xing528.com)
运行在额定风速以上时也要防止转矩给定值跌落,当桨距角不在最优限定值时,采用转矩的单向控制是一种有效地防止转矩给定值降低的办法。用风轮的动能来避免瞬时的功率降低,也能使功率在额定风速附近平稳输出。
为达到理想的平稳过渡效果,可以选择在到达额定点C以前就提前变桨,如图5-12所示。控制风轮吸收的机械功率,限制风轮过大的动态惯性能量冲击,这样的控制方法可以有效地增强系统可控性和可靠性,但是带来的不利因素是将提高机组的额定风速,也即提高了BC段过渡区域的长度。尽管如此,目前大多数的变速恒频风电机组还是采用了这样的过渡方式,毕竟在额定点控制瞬态载荷是非常重要的,而且事实上采用这样的过渡方式带来的功率损失也很小。
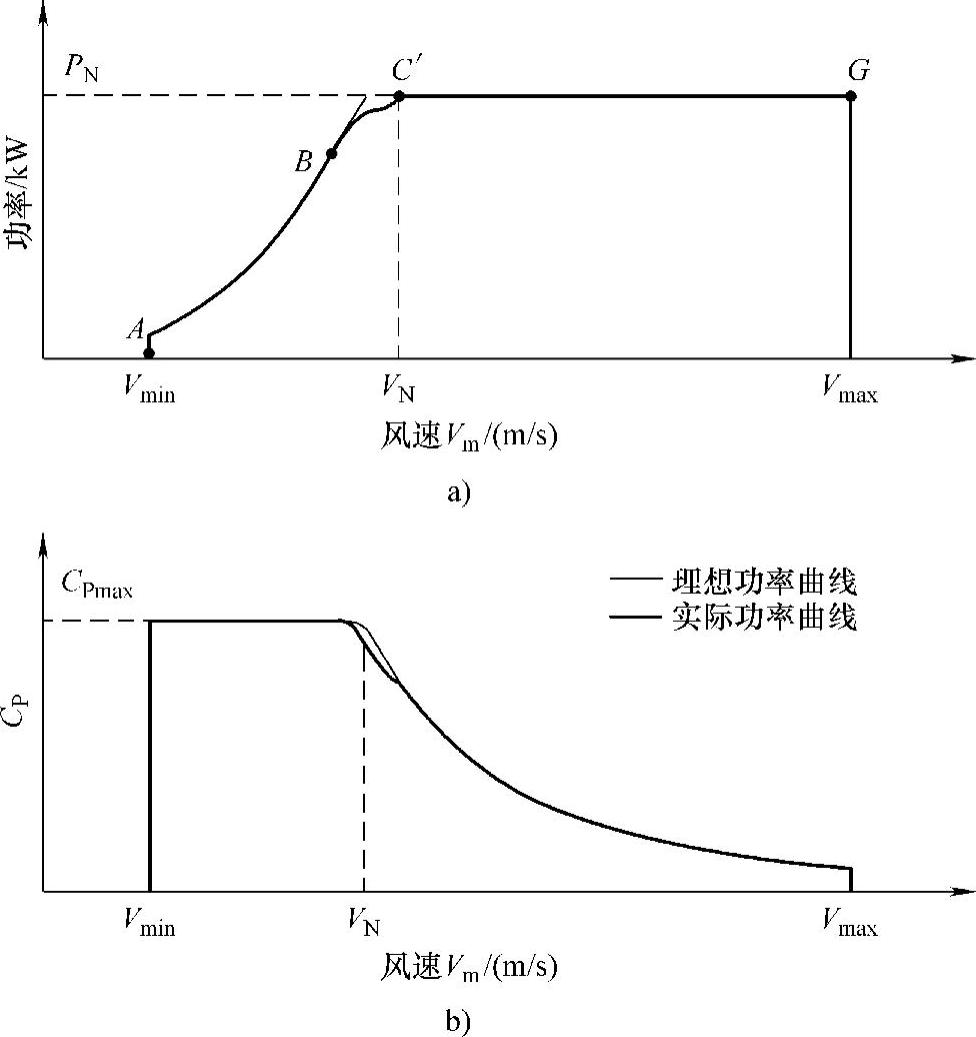
图5-12 过渡区域提前变桨调节对功率和CP的影响
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。