



永磁同步风电机组的并网过程
永磁同步直驱式风电机组的结构如图4-15所示。
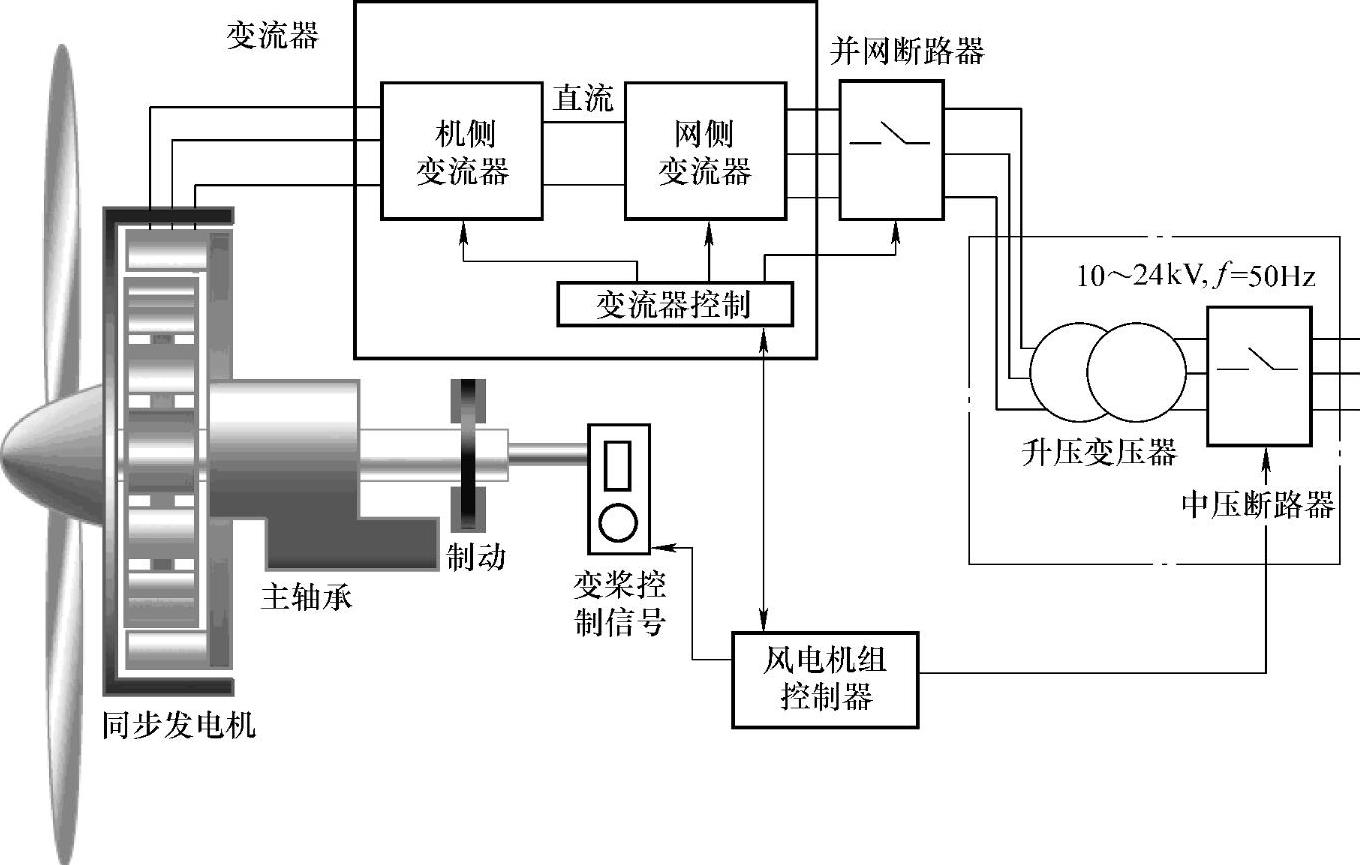
图4-15 永磁同步直驱式风电机组的结构
永磁同步风电机组也可以实现无冲击并网。首先,机组在自检正常的情况下,风轮处于自由运动状态,当风速满足起动条件且风轮正对风向时,变桨执行机构驱动桨叶至最佳桨距角。然后,风轮带动发电机转速至切入转速,变桨机构不断调整桨距角,将发电机空载转速保持在切入转速上。此时,风电机组主控制器如认为一切就绪,则发出命令给变流器,使之执行并网操作。
图4-16所示为变流器在得到并网命令后,首先以预充电回路对直流母线进行限流充电,在电容电压提升至一定程度后,电网侧主断路器和定子侧接触器闭合,而后电网侧变流器和机组侧变流器开始调制,接着开始对机组进行转矩加载并调整桨距角进入正常发电状态。
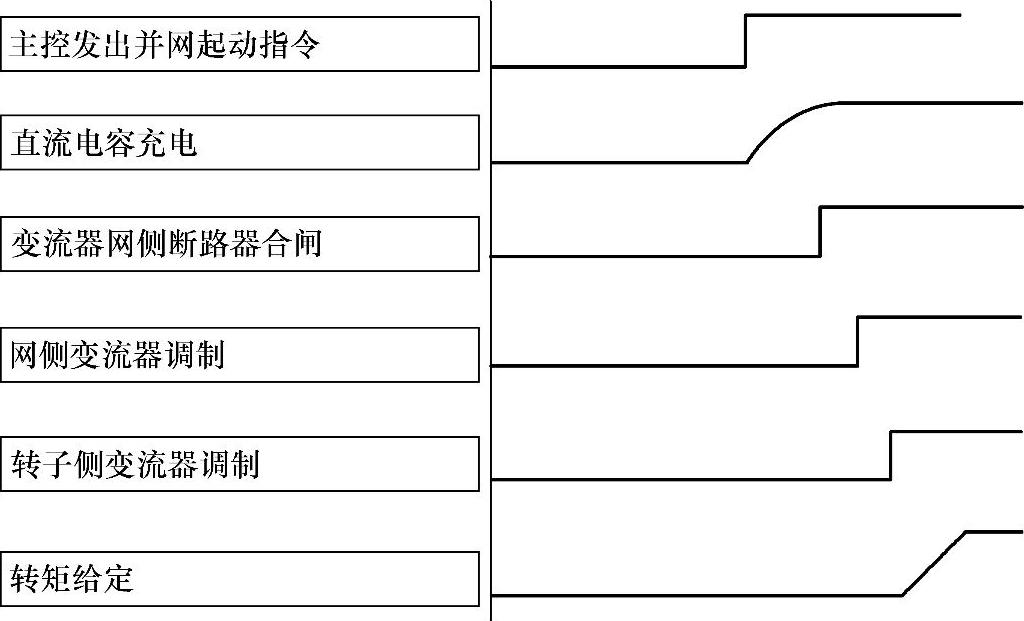
图4-16 永磁同步风电机组并网起动过程[8]
通过图4-16与图4-12的比较,可见永磁同步机组在并网过程中不存在“同步”阶段,在发电机连接到电网的整个过程中,通过发电机和变流器的电流均在系统控制之下。(https://www.xing528.com)
双馈机组的同步化是以电网三相交流电压和发电机定子三相交流电压的幅值、频率、相位、相序的吻合来实现的,这个过程需要通过控制发电机这一复杂的多变量、非线性机电系统来实现,因而具有一定的难度。
永磁同步机组全功率变换是以发电机侧变流器对发电机三相交流空载电压的追随来实现的,其动态过程中,变流器直流侧电压保持稳定,因电力电子器件的控制速度相对于发电机的机械速度变化而言要快得多,所以要实现是非常容易而迅速的,相当于PWM控制将稳定的直流电压逆变为某一特定的三相交流电压,可以直接将测量到的定子三相交流电压转换后作为发电机侧变流器控制的输入给定。
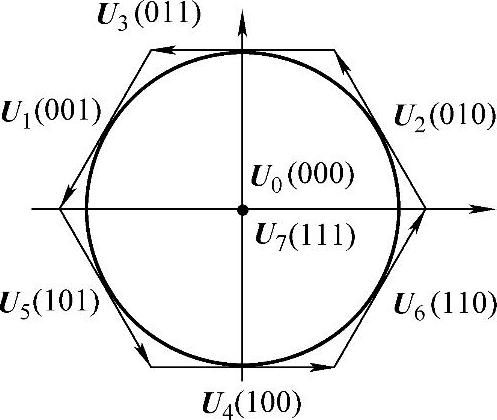
图4-17 电压空间矢量的八种工作状态
测量到的发电机定子三相交流电压经过矢量变换后可以转换到两相旋转坐标系进行解耦,而根据电压空间矢量和的相加可以得到圆形旋转磁场。根据主电路六个功率器件的八种开关状态和电压空间矢量的定义,可得到八个基本电压空间矢量,如图4-17所示。当电压空间矢量非零时,电压将沿着电压空间矢量的方向以正比于直流电压的速度移动;当为零电压矢量时,电压就停下来。利用这八个基本电压空间矢量的线性组合,可以合成更多的与U1~U6相位不同的新的电压空间矢量,最终构成一组等幅不同相的电压空间矢量,尽可能逼近圆形旋转磁场的磁链圆,而这也就使发电机侧变流器实现了对期望的定子三相交流电压的追随。
在并网起动指令发出到转矩加载的过程中,机组应通过变桨执行机构的调节作用使发电机转速基本稳定,这样发电机定子端电压的相位、频率和幅值也就保持了基本稳定。
全功率变换方式的风电机组,其并网方式大致是相同的,本节的内容不但适用于采用永磁同步发电机的风电机组,也适用于采用无刷励磁同步发电机的风电机组。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。