



(一)双馈异步发电机及变流器的工作原理
变速恒频风电机组目前广泛采用的是交流励磁变速恒频发电技术,采用双馈异步发电机(Doubly Fed Induction Generator),定子直接接到电网上,转子通过三相变流器实现交流励磁,如图3-18所示。
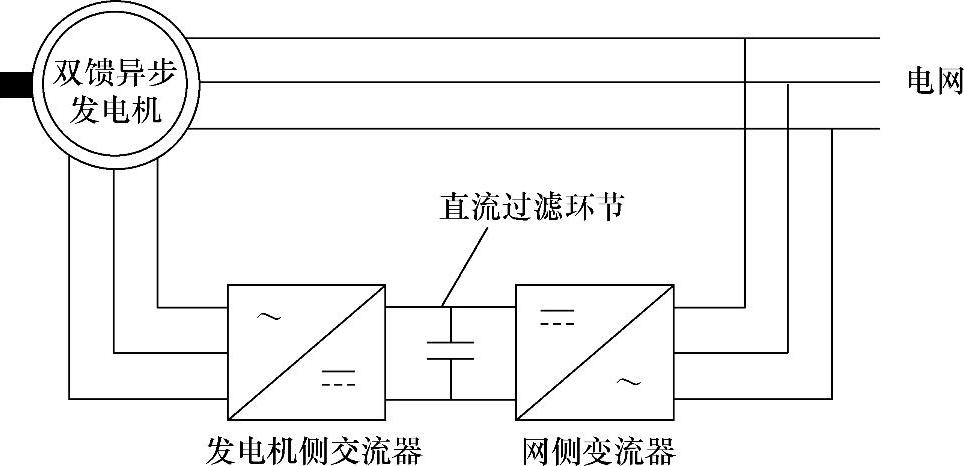
图3-18 交流励磁变速恒频风力发电系统
在研究风力发电机及变流器的特性之前,我们有必要首先来了解变速恒频双馈发电技术的基本原理,可用图3-19来说明。
图3-19中,定子绕组并网,而转子绕组外接励磁变流器实现交流励磁。当发电机转子频率fΩ变化时,控制励磁电流频率f2来保证定子输出频率f1恒定,即
f1=npfΩ+f2 (3-16)
式中 np——发电机极对数。
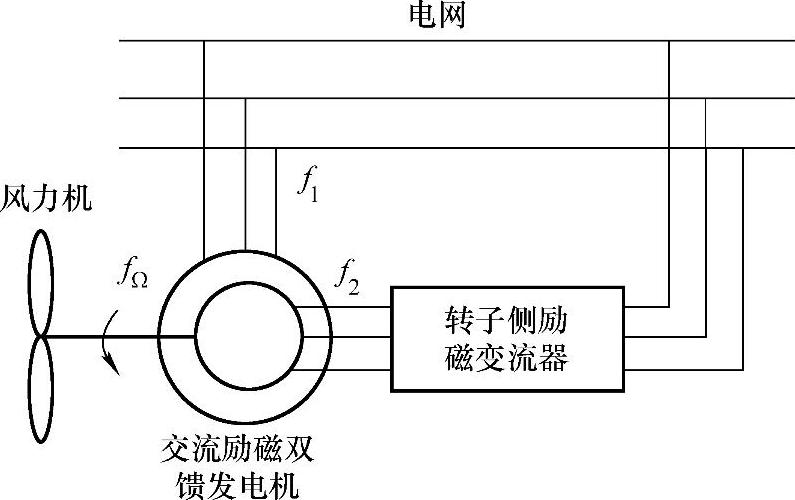
图3-19 变速恒频双馈发电技术原理图
这样,当发电机转速低于气隙磁场旋转速度时,作亚同步运行,有f2>0,变流器向发电机转子提供正相序励磁。在不计损耗的理想条件下,有
P2≈sP1 (3-17)
式中 P1——定子输出电功率;
P2——转子输入电功率。
因转差率s>0,有P2>0,变流器向转子输入有功功率。
当发电机转速高于气隙磁场旋转速度时,作超同步运行,f2<0。此时,一方面变流器向转子提供反相序励磁,另一方面因s<0、P2<0,转子绕组向变流器送入有功功率。当发电机转速等于气隙磁场旋转速度时,f2=0,变流器向转子提供直流励磁。此时,s=0、P2=0,变流器与转子绕组之间无功率交换。由此可见,发电机励磁频率的控制是实现变速恒频的关键。
在忽略损耗的情况下,有如图3-20所示的功率关系,但通过变流器的功率方向在发电机亚同步运行时会反向。
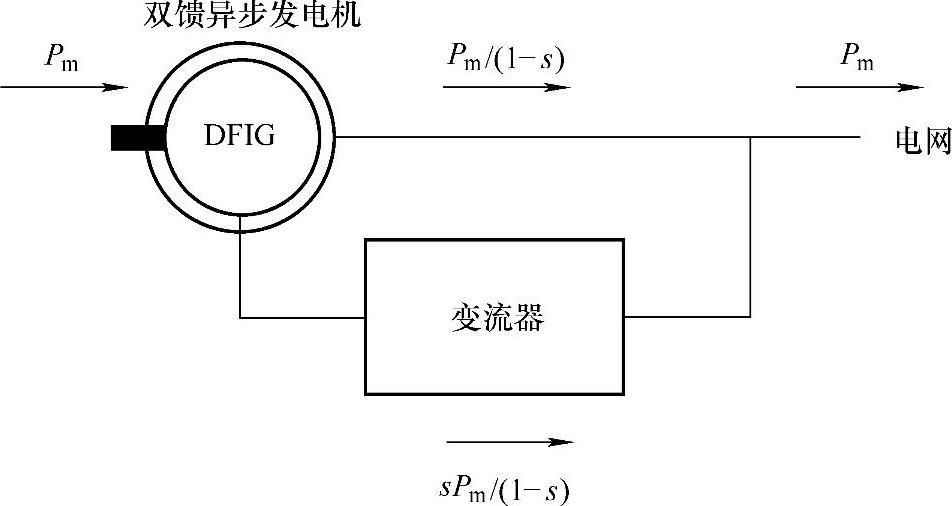
图3-20 双馈发电机组的功率关系
在追踪最大风能捕获的变速运行中,使风电机组在不同风速下均能以保持风能利用系数CP=CP max的最佳转速运行。而要保持恒定的CP,可以通过调节发电机的有功功率来改变其电磁阻力转矩,进而调节机组转速,这是通过发电机定子磁链定向矢量变换控制来实现的。
(二)发电机及变流器的特性
1.基本关系
类似于普通异步电机的等效电路(见图3-14),双馈异步电机的等效电路如图3-21所示。
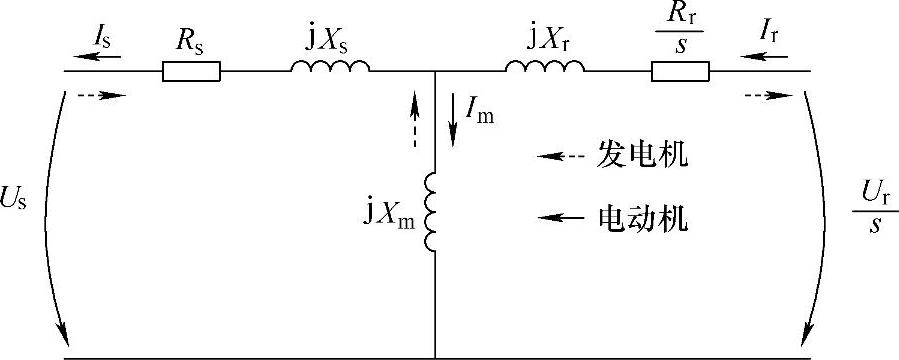
图3-21 双馈异步电机的等效电路
由图3-21可得

从而电磁转矩为

式中,Is∗为Is的共轭值。以及有功功率和无功功率的表达式为
2.坐标变换
由电机学的坐标变换理论可知,若将在固定轴线(定子)上的电压、电流和磁链变换到旋转的轴线(转子)上来,可以将电机中随转子转角θ而变化的自感和互感变换成常值,从而使恒速运行时电机的电压方程,从时变系数的微分方程变换为常系数微分方程,进而使求解大为简化。
设S代表要变换的定子量(电流、电压或磁通),可以用矩阵形式写出变换为

及反变换为

式中,S为变换的量;下标的d和q分别为直轴和交轴;式中下标为0的是零序分量,在三相对称的情况下不产生零序分量。
在dq0坐标下的电压方程为
 (https://www.xing528.com)
(https://www.xing528.com)
式中 p——微分算子;
ωr——用电角表示时转子的旋转角速度。
式3-24即派克方程,由此可见,直轴和交轴电压方程中出现了运动项,这是由于abc坐标系是静止不动的,而dq0坐标系则与转子一起旋转。
3.磁场定向[4]
双馈电机可以采用磁场定向的方法进行控制,磁场定向矢量控制基于电机动态方程,通过控制电机电流矢量与定向磁场矢量的夹角和大小来实现对无功功率和有功功率的控制。在双馈发电系统中,通常使用定子磁场定向矢量控制。
图3-22为发电机并网分析用参考坐标系示意图,其中αs-βs为定子两相静止坐标系,αs轴取定子A相绕组轴线正方向。αr-βr为转子两相坐标系,αr取转子a相绕组轴线正方向。αr-βr坐标系相对于转子静止,相对于定子绕组以转子角速度ωr逆时针方向旋转。d-q坐标系是两相旋转坐标系,以同步速ω1逆时针旋转。αs轴与αr轴的夹角为θr,d轴与αs轴夹角为θs。
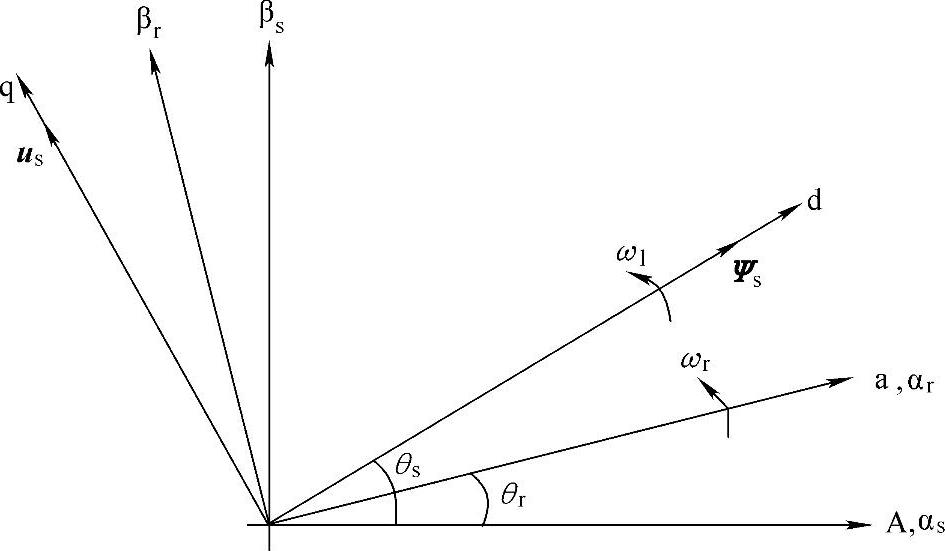
图3-22 坐标变换系统
为实现发电机有功﹑无功的解耦和独立调节,控制系统采用了发电机定子磁链定向矢量变换控制,所采用的d-q坐标系的d轴与定子磁链矢量Ψs的方向重合,并按电动机惯例建立发电机数学模型。在磁链定向矢量控制的前提下,有

式中 p——微分算子;
us——电压矢量。
由于定子接入工频电网,与电抗相比可以忽略定子电阻,发电机端电压矢量us应该超前定子磁链矢量Ψs90°,即位于q轴正方向。式(3-31)可分别写为定子电压方程和转子电压方程。
定子电压方程为

式中,u1为定子电压矢量的幅值。
转子电压方程为

定子磁链方程为

转子磁链方程为

电磁转矩方程为

运动方程式为

式中,R、L分别为电阻、电感;Ψ为磁链;下标为s、r、m的物理量分别为定子、转子及气隙相关量;下标为d、q的物理量代表d-q坐标系中相应分量;ωs=ω1-ωr,ω1为同步角速度,ωr为转子角速度;TL为机组低速轴输出驱动转矩;J为风电机组转动惯量;p为微分算子,p=d/dt。
当调节q轴转子电流时,即可控制定子有功功率的大小,而通过调节d轴的转子电流则可控制定子无功功率的大小。
由式(3-28)则可以得到,定子电流iqs、ids与转子电流iqr、idr之间的关系如下,从而实现通过控制发电机转子电流来控制发电机定子电流和定子功率。

同时,对于网侧变流器而言,当d轴与电压矢量重合时,有

可见,控制d轴和q轴电流即可分别控制网侧变流器输出的有功功率和无功功率。
由以上各式可见,通过双馈变流器可以实现对发电机定子和网侧变流器输出的有功功率和无功功率的独立控制。由变流器的d、q轴电流控制目标可得到d、q轴的电压控制目标,进而通过坐标旋转变换(2Φ/3Φ)可得到发电机转子三相电压控制目标,从而产生励磁变频电源所需的PWM指令,控制PWM变流器产生所需的频率、大小、相位的三相交流励磁电压,最终实现发电机组功率控制、转速调节、最大风能捕获运行。
描述定子磁链定向控制系统的控制框图如图3-23所示。
这是一个功率、电流双闭环系统。在功率闭环中,有功指令P∗根据机组特性按最大风能获取原则给出,无功指令Q∗根据电网需求设定;反馈功率P、Q则是通过对发电机输出电压、电流检测和坐标旋转变换后计算求得。P、Q给定值与反馈值相比较,经PI功率调节器运算,分别输出发电机定子电流有功分量及无功分量指令i∗qr、i∗dr,它们与转子电流反馈值iqr、idr比较并经PI调节后,可输出转子电压解耦项udr′、uqr′,就可获得转子电压指令值Δudr、Δuqr,经过旋转变换后,最终可获得励磁电源的三相电压控制指令u∗ar、u∗br、u∗cr。坐标旋转变换所需的定子磁链空间位置θs、转子位置角θr是通过定子磁链Ψs观测器和转子同轴光电编码器测得的。
交流励磁发电技术关键在于其定转子之间的解耦以及磁场定向的问题,利用坐标变换和定子磁场定向可以很好地解决这两个问题。通过矢量控制的基本原理,可以得出交流励磁发电机定子磁场定向下的系统控制框图。由于交流励磁发电机的空载并网可以看作是其正常工作状态的一个特殊情形,故在实现了对交流励磁发电机的控制之后,在此基础上可以进一步研究其空载并网策略。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。