



命令表功能提供了另外一种轴控制的解决方案,可将单个轴的多个运动控制指令的轨迹合并到一个运动序列中,命令表添加方式如图12-75所示。到目前为止,只有S7-1200 PTO开环控制方式可以使用命令表功能,PROFIdrive和模拟量控制方式都不支持命令表功能。所创建的命令表将链接到某个轴,并在用户程序中通过“MC_CommandTable”运动控制指令进行使用,可以处理部分或全部命令表。
插入命令表成功后,可以看到如图12-76所示的命令表参数组态视图。
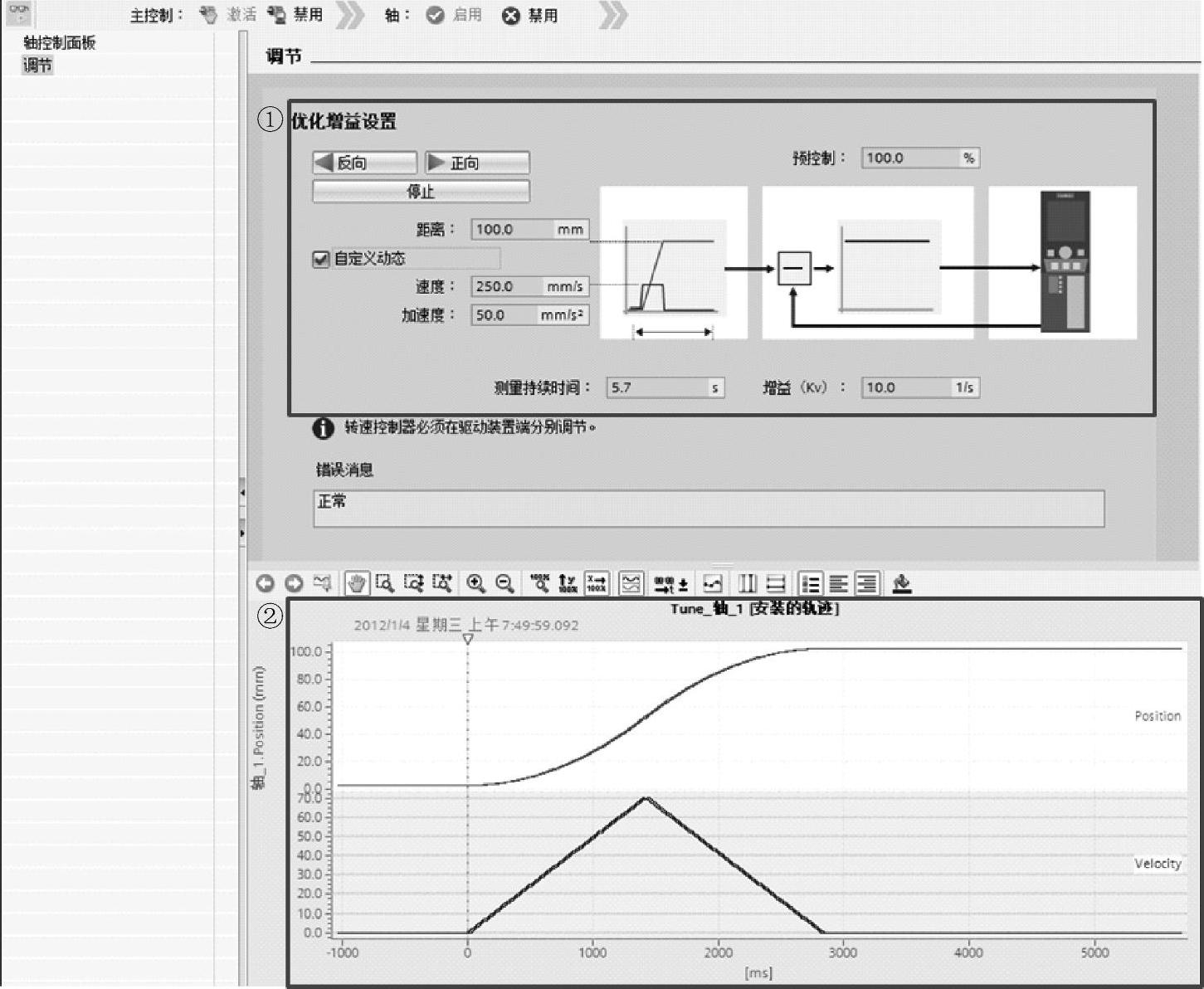
图12-74 调节面板
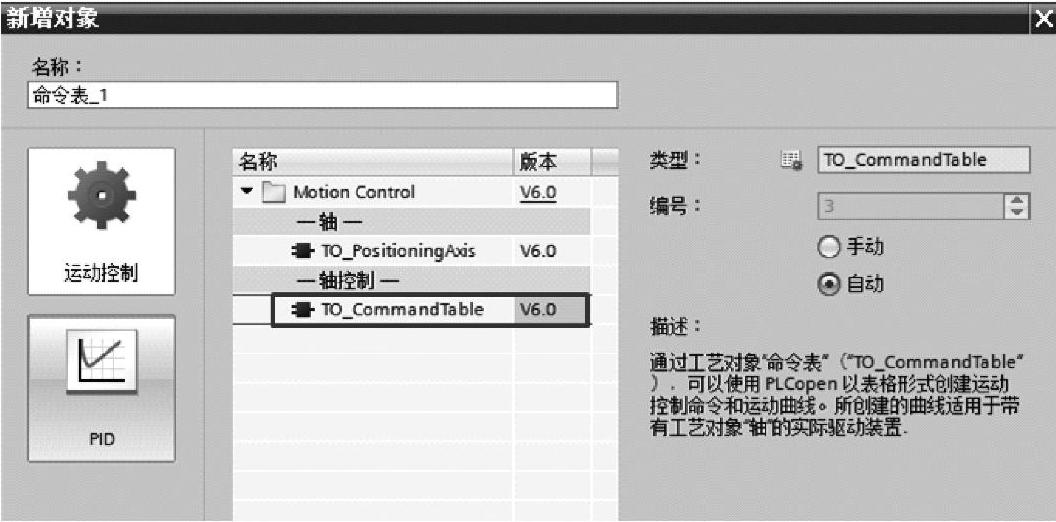
图12-75 添加新命令表

图12-76 命令表组态
命令表参数包括:“基本参数”和“扩展参数”。“基本参数”包括“常规”和“命令表”两部分。“常规”就是命令表的名称,“命令表”是重点配置部分,用来配置命令曲线。“扩展参数”包括“扩展参数”、“动态”和“限制”三部分。如果在“命令表”中选择已组态的轴,则“扩展参数”中的参数都是不能更改的。用户可以在“命令表”页面选择“样轴”,则“扩展参数”中的参数都是可组态的。“动态”中可以配置轴的加速度,减速度,加加速度。“限值”中可以配置轴的启动/停止速度,以及软限位开关,“动态”以及“限值”中配置的参数具体含义请参考开环运动控制章节。“命令表”中“启用警告”后,如果命令表中配置的参数超出“轴参数”的参数范围时会有警告信息提示。
用户可以配置完“样轴”的参数后,把样轴的参数复制到之前配置的轴对象,如图12-77所示。用户也可以把轴_1,轴_2,轴_3,或轴_4中任意一个轴的配置参数复制到“样轴”。
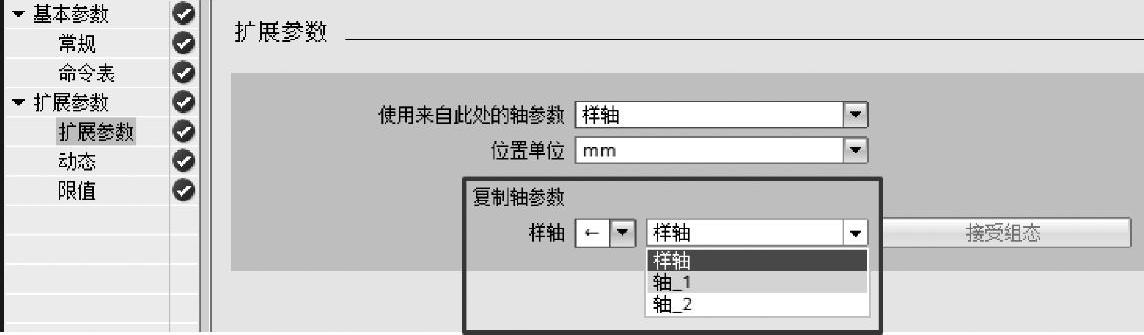
图12-77 扩展参数
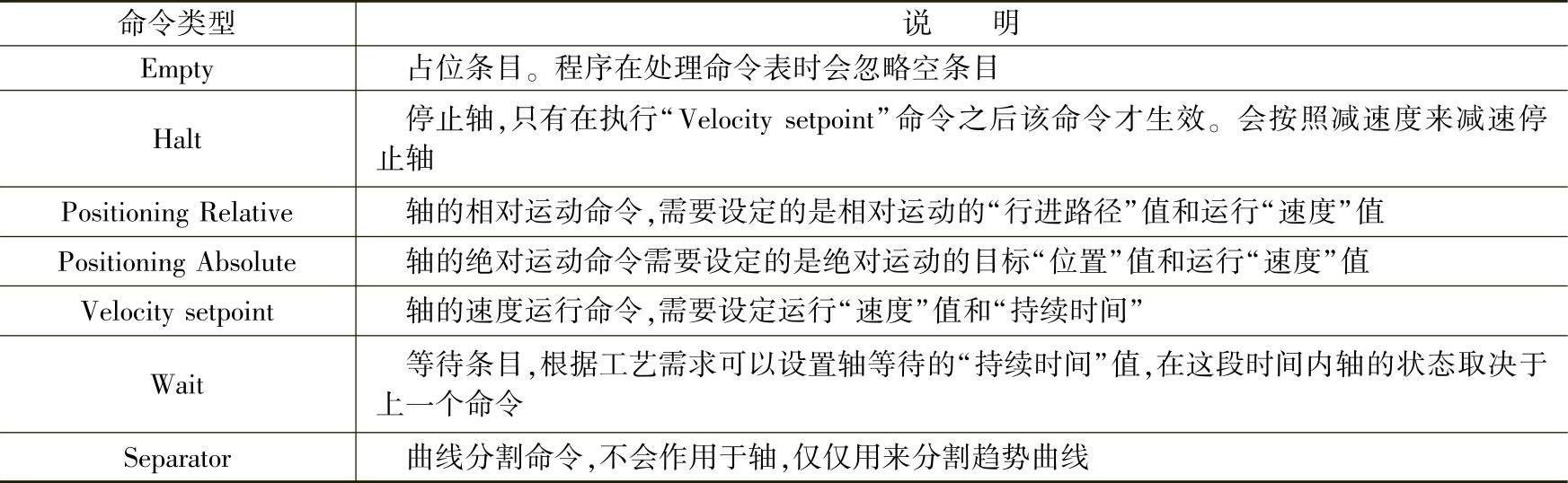
确定轴参数后,可在“命令表”组态窗口中创建所需的运动序列,并根据趋势图中的图形视图来检查结果。最多可输入32个步,按顺序处理命令,生成复杂运动轨迹。可选择的用于命令表的命令类型,见表12-22。(https://www.xing528.com)
表12-22 命令表命令类型
可以对命令表中的步进条目进行剪切、复制、粘贴,以及删除等操作也可以通过选择曲线图,右键菜单来选择趋势曲线的标尺或限制值等选项,如图12-78所示。
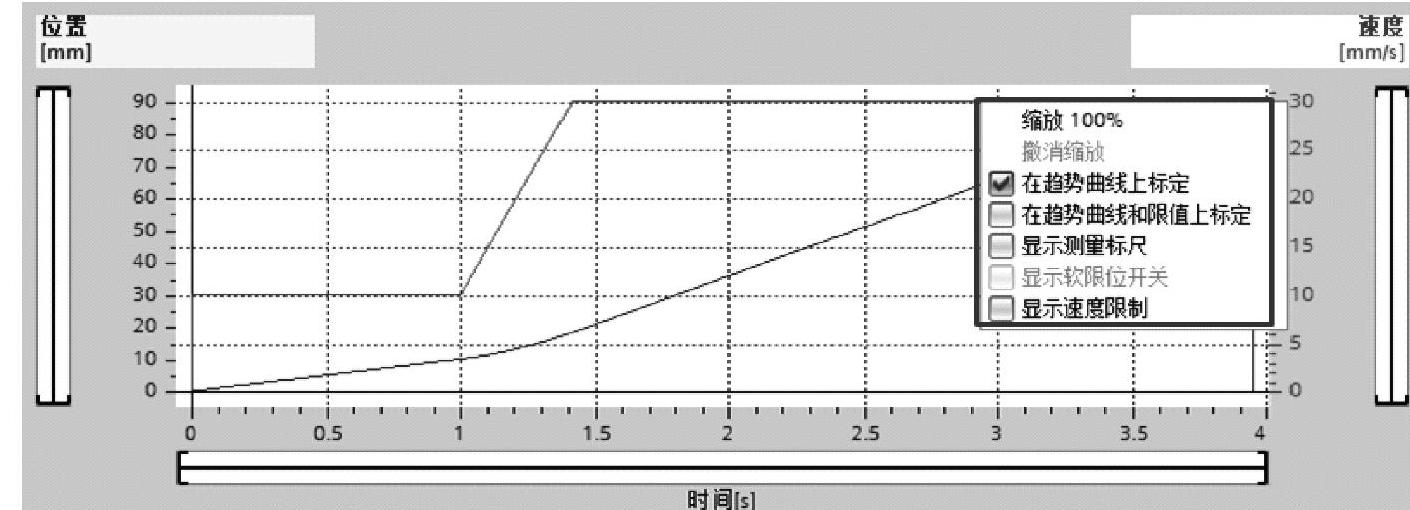
图12-78 基本参数-命令表
在命令表中,可以为步进条目设置前后命令之间的衔接模式,分成“命令完成”和“混合运动”,如图12-79所示。
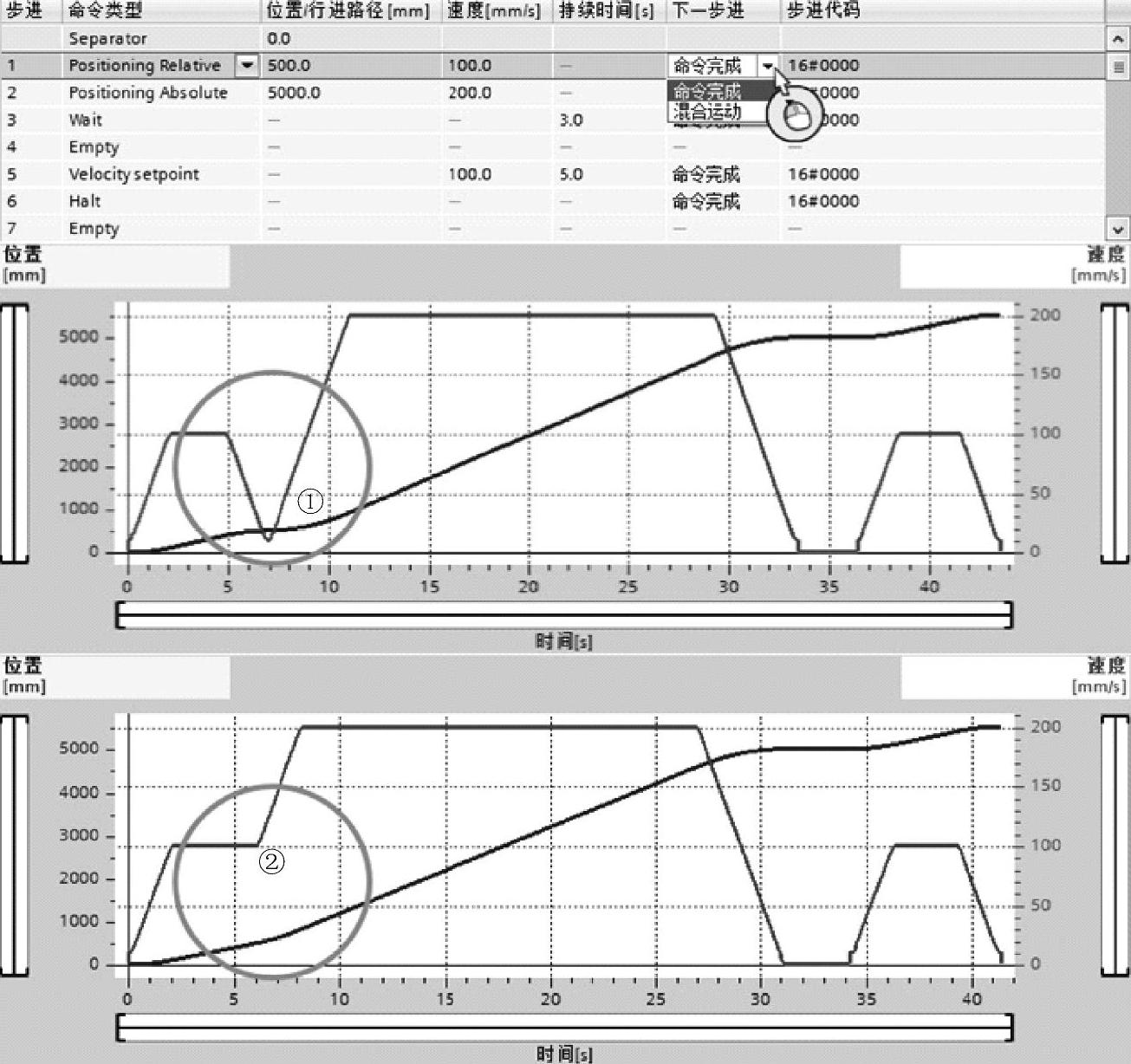
图12-79 命令完成与混合运动
①“命令完成” 两个指令之间衔接时,会减速到启动/停止速度。
②“混合运动” 两个命令之间衔接时,系统会结合前后指令的速度进行计算,得到新的曲线路径,轴的速度变化平滑过渡,轴不会停止。
在轴已启用的状态下,可以通过“MC_CommandTable”指令控制命令表的运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。