



在使用PID控制器之前,需要在PID工艺对象中对其进行组态设置,主要分为基本设置、过程值设置、执行器设置和高级设置。
1.基本设置
(1)控制器类型
“PID_3Step”与“PID_Compact”设置基本相同,如图11-7所示。“PID_3Step”增加了“转换时间测量”模式,用来检测执行器从关到开所需的行程时间,如图11-16所示。
(2)Input/Output参数
可以选择过程值、PID输出的类型及执行器反馈信号选择等参数,如图11-17所示。
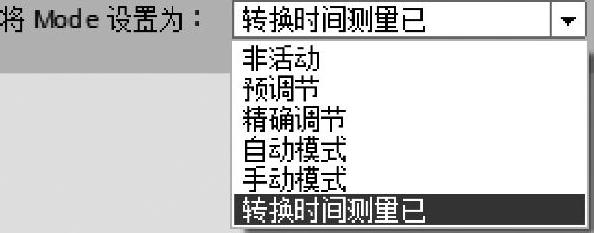
图11-16 PID_3Step模式设置
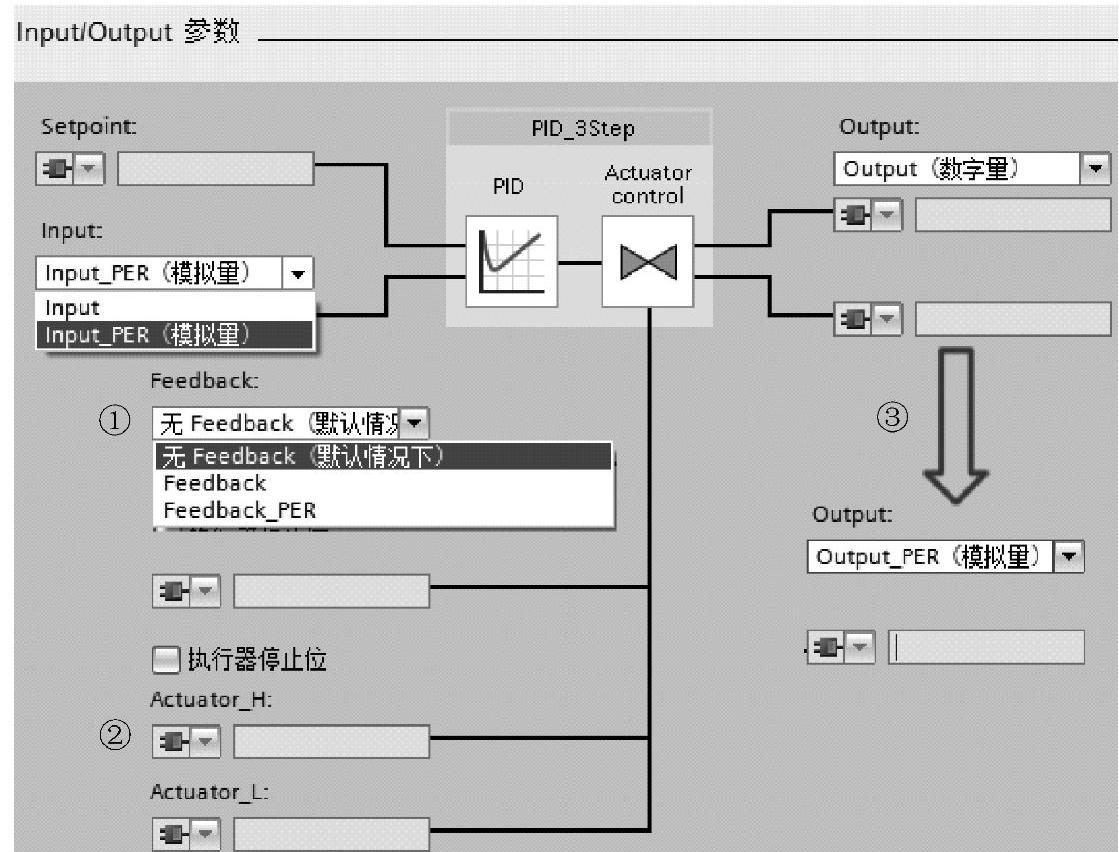
图11-17 PID_3StepInput/Output类型设置
①执行器反馈信号类型选择:
“无Feedback”:没有执行器模拟量反馈信号;
“Feedback”:输入标定后的执行器模拟量反馈信号;
“Feedback_PER”:输入未标定的执行器模拟量反馈信号。
②勾选“执行器停止位”以激活上、下限位功能:
“Actuator_H”:执行器上限停止位;
“Actuator_L”:执行器下限停止位。
③PID输出类型选择:
Output(数字量):PID数字量输出Output_UP/Output_DN;
Output_PER(模拟量):PID模拟量输出0~27648。
注意:
当选择PID输出为模拟量时,“PID_3Step”与“PID_Compact”的自动调节和抗积分饱和功能略有不同。“PID_3Step”会将因电机转换时间所致的模拟量输出值对过程的延迟影响考虑在内;如果相关电动机转换时间并未影响过程,即PID输出值直接且完全影响过程,建议使用“PID_Compact”。
2.过程值设置
“PID_3Step”的过程值设置选项卡与“PID_Compact”一致,详见第11.2.2节。
3.执行器设置(https://www.xing528.com)
(1)执行器
设置电动机转换时间、最小关断时间及最小接通时间,如图11-18所示。
①“执行器特定时间”:
“电机转换时间”:执行器动作从下限停止位到上限停止位所需的时间;
“最短接通时间”和“最短关闭时间”与“PID_Compact”设置相同。
②“对错误的响应”与“PID_Compact”错误响应相同,见表11-3。
(2)输出值限制
当选择输出类型为Output_PER,则PID_3Step的输出限制将被激活,其设置与PID_Compact一致,详见第11.2.2节。
(3)反馈标定
当启用执行器模拟量阀位反馈时,可通过阀位开度的模拟量反馈信号标定阀门的实际开度,如图11-19。
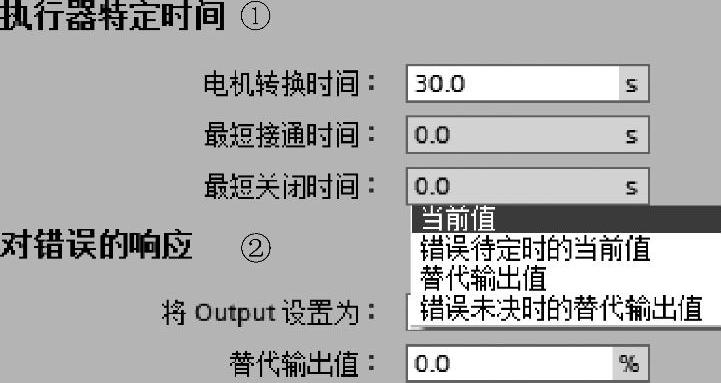
图11-18 PID_3step执行器设置
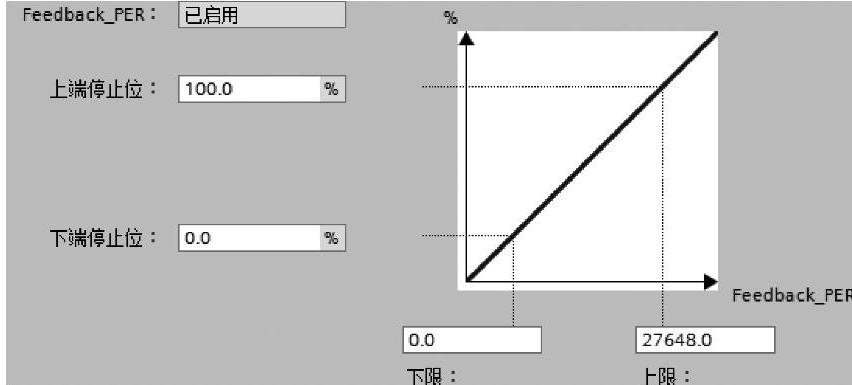
图11-19 PID_3Step阀门反馈标定
4.高级设置
(1)过程值监视
“PID_3Step”的过程值监视与“PID_Compact”一致,详见第11.2.3节。
(2)PID参数
“PID_3Step”与“PID_Compact”相比,增加了死区功能。在控制系统中,执行机构如果动作频繁,会导致小幅振荡,造成机械磨损,很多控制系统允许被控量在一定范围内存在误差,该误差称为PID的死区,其大小称为死区宽度,参数如图11-20所示。
当过程值满足公式:SP-“死区宽度”<PV<SP+“死区宽度”时,PID停止调节保持输出不变,如图11-21所示。
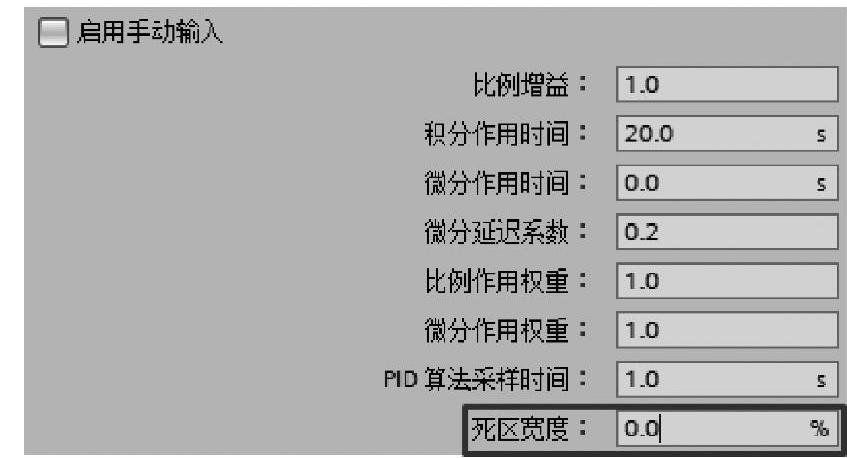
图11-20 PID_3StepPID参数设置
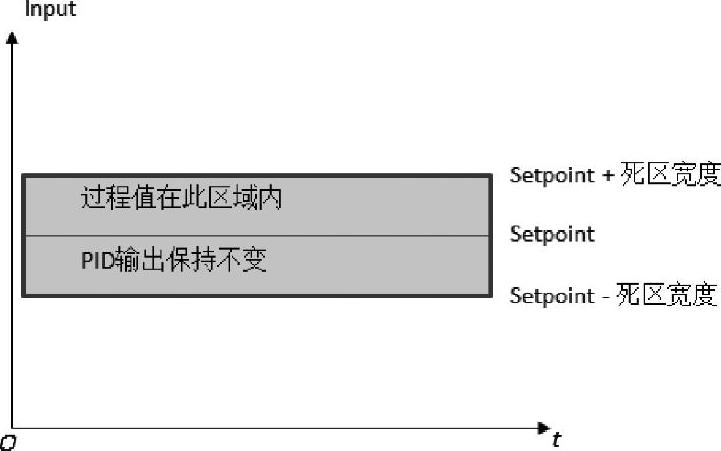
图11-21 PID_3Step死区控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。