



为保证PID控制器能正常运行,需要设置符合实际运行系统的控制参数,但由于每套系统都不完全相同,所以每一套系统的控制参数也不尽相同。PID控制参数可以由用户自己手动设置,也可以通过TIA博途软件提供的自整定功能实现。PID自整定是按照一定的数学算法,通过外部输入信号激励系统,并根据系统的反应来确定PID参数。S7-1200提供了两种自整定方式:预调节和精确调节。可通过调试面板进行整定,调试面板通过以下路径:“项目>工艺对象>PID_Compact_1>调试”打开,如图11-13所示。
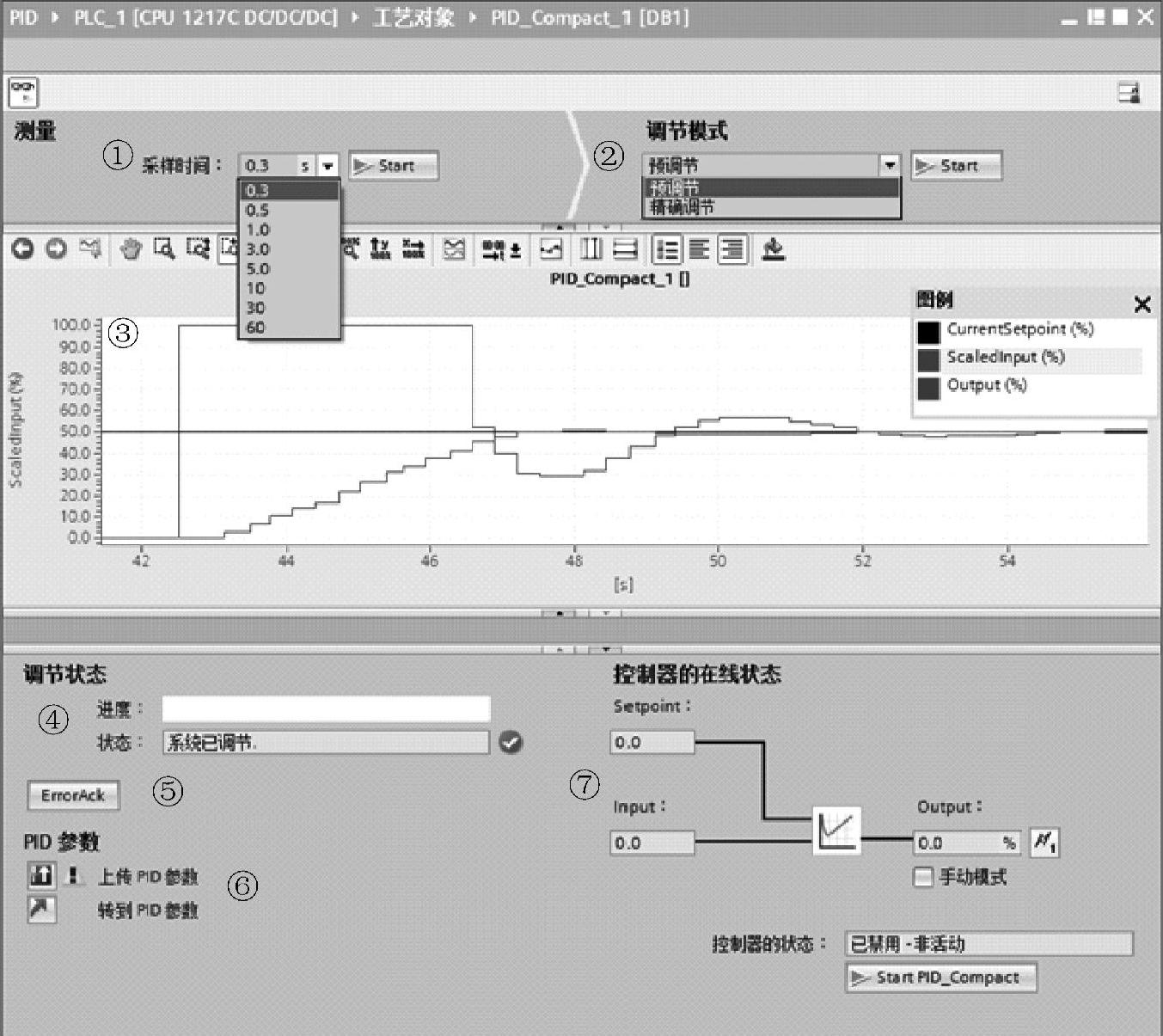
图11-13 PID_Compact调试面板
①趋势图采样时间。
②“调节模式”:预调节、精确调节。
③“趋势图”:显示过程值、设定值、PID输出值。
④“调节状态”:显示当前调节的进度及状态。
⑤错误确认。
⑥“上传PID参数”:将实际的PID控制参数上传至项目并转到PID参数组态界面。
⑦“控制器的在线状态”:显示过程值、设定值、PID输出值及控制启动“PID_Compact”。
1.预调节
预调节功能可确定对输出值阶跃的过程响应,并搜索拐点。根据受控系统的最大上升率与延迟时间计算PID参数。过程值越稳定,PID参数就越容易计算,其结果的精度也会越高。只要过程值的上升速率明显高于噪声,就可以容忍过程值的噪声。启动预调节的必要条件如下:
1)在循环中断OB中调用“PID_Compact”。
2)ManualEnable=FALSE且Reset=FLASE。
3)“PID_Compact”处于以下模式之一,即“未激活”、“手动模式”、“自动模式”。
4)设定值和过程值均处于组态的限值范围内。
5)设定值与过程值的差值大于过程值上限与过程值下限之差的30%。
6)设定值与过程值的差值大于设定值的50%。
要执行预调节,可参考图11-14。
2.精确调节(https://www.xing528.com)
精确调节将使过程值出现恒定受限的振荡,根据此振荡的幅度和频率为操作点调节PID参数,所有PID参数都重新计算。精确调节得出的PID参数通常比预调节得出的PID参数具有更好的主控和扰动特性。启动精确调节的必要条件如下:
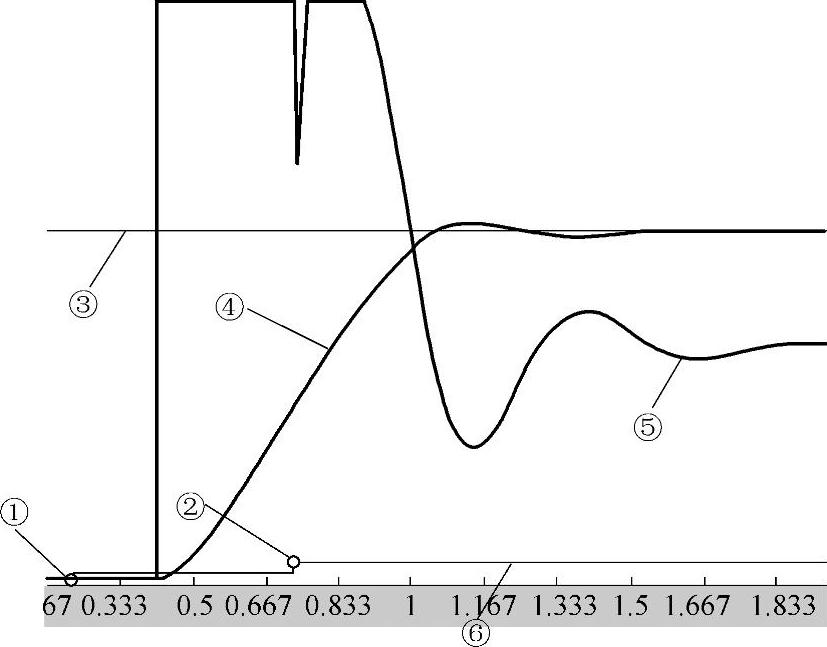
图11-14 PID_Compact预调节趋势图
①—开始整定State=1 ②—整定完成State=3 ③—设定值曲线 ④—过程值曲线 ⑤—PID输出值曲线 ⑥—State曲线
1)已在循环中断OB中,调用“PID_Compact”。
2)ManualEnable=FALSE且Reset=FLASE。
3)“PID_Compact”处于以下模式之一,即“未激活”、“手动模式”、“自动模式”。
4)设定值和过程值均处于组态的限值范围内。
5)在操作点处,控制回路已稳定。过程值与设定值一致时,表明到达了操作点。
6)不能被干扰。
要精确调节,可参考图11-15所示。
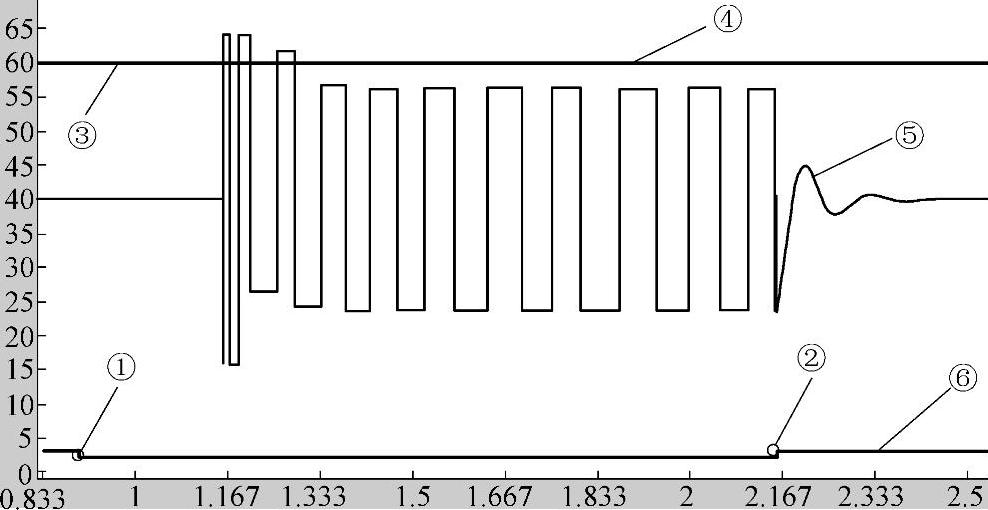
图11-15 PID_Compact精确调节趋势图
①—开始整定State=2 ②—整定完成State=3 ③—设定值曲线 ④—过程值曲线 ⑤—PID输出值曲线 ⑥—State曲线
注意:
•上传PID参数后,将出现程序不一致的情况,建议重新下载程序。
•启动自整定对设备会有冲击,需注意现场是否适合自整定。
•启动精确调节时,当不满足精确调节的条件时,若满足预调节条件,则首先进行预调节,再进行精确调节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。