



使用PID控制器前,需要在其工艺对象中进行组态设置。组态分为基本设置、过程值设置、高级设置3部分,如图11-5所示。
1.基本设置
(1)控制器类型
选项说明如图11-6所示。
①选择设定值与过程值的物理量及单位。
②PID控制正反作用选择:勾选为反作用。
正作用:随着PID输出的增加(或减小),控制过程值使偏差变小(或变大)。
反作用:随着PID输出的增加(或减小),控制过程值使偏差变大(或变小)。

图11-5 PID_Compact组态界面
③CPU重启后PID控制器的工作模式。
勾选后可选择所需工作模式;
不勾选为“非活动”模式。
(2)选择Input/Output参数
在Input/Output选项卡内可以选择过程值及PID输出的类型,如图11-7所示
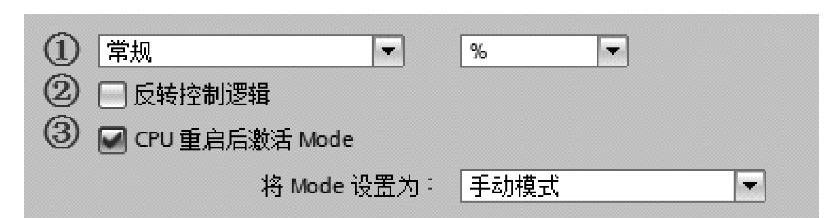
图11-6 PID_Compact控制器类型设置
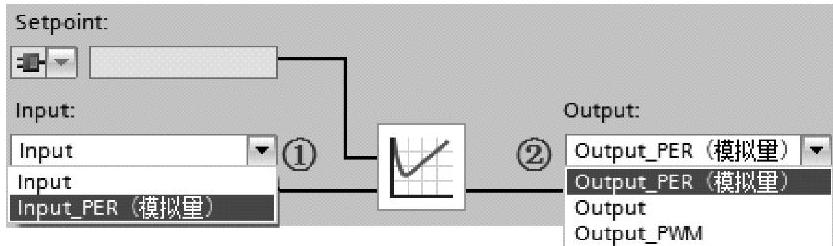
图11-7 PID_CompactInput/Output类型设置
①选择过程值类型
“Input”:标定后的过程值。例如:0~100%,或实际值0~16kPa等物理量。
“Input_PER”:模拟量通道值,0~27648。
②选择PID输出类型:
“Output_PER”:直接输出模拟量通道值,0~27648。
“Output”:0~100%。
“Output_PWM”:脉宽调制输出。
2.过程值设置
当选择Input作为过程值时,设置过程值的上、下限,如图11-8所示。当选择Input_PER作为过程值时,可对该值进行标定,如图11-9所示。
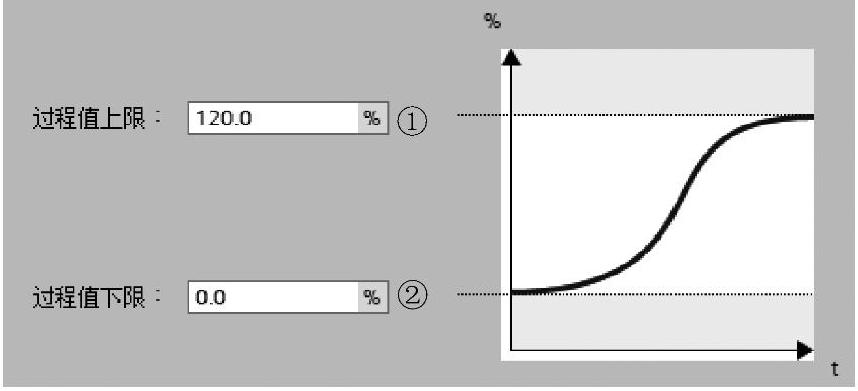
图11-8 PID_Compact过程值限值设置
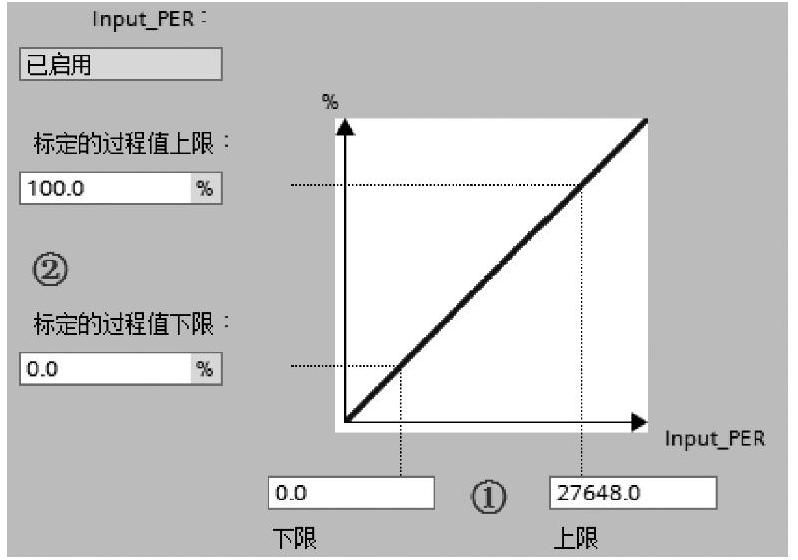
图11-9 PID_Compact过程值标定
图1-18中①“过程值上限”:当选择Input为输入时,过程值的上限值。
②“过程值下限”:当选择Input为输入时,过程值的下限值。
图1-19中①“上限”和“下限”:当选择Input_PER为输入时,过程值对应的模拟量输入上、下限值,默认为0~27648。
②“标定的过程值上限”和“标定的过程值下限”:当选择Input_PER为输入时,过程值(0~27648)所对应的工程量上、下限值。
 (https://www.xing528.com)
(https://www.xing528.com)
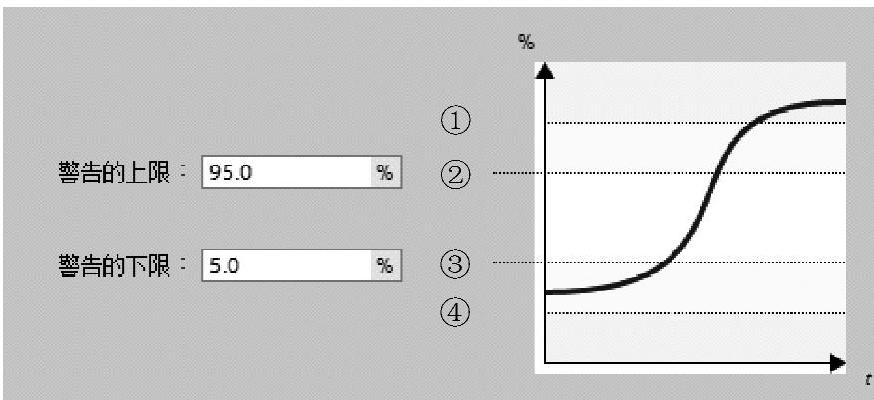
图11-10 PID_Compact警告值上、下限设置
①—过程值上限 ②—警告的上限 ③—警告的下限 ④—过程值下限
3.高级设置
(1)过程值监视
可以设置过程值警告上、下限值,当过程值超出上、下限时,PID_Compact输出错误代码0001h;当警告的上、下限范围大于过程值上、下限范围时,过程值上、下限值同时作为警告的上、下限,如图11-10所示。
(2)PWM限制
在PWM限制内设置PID输出的最短接通时间及最短关闭时间以防止输出频繁振荡,对设备造成损坏,对工艺造成冲击。
•最短接通时间:一个PWM周期内允许PID脉冲输出的最短时间,当PID计算得到的脉冲输出时间小于该值时,该周期内脉冲不输出。
•最短关闭时间:一个PWM周期内允许PID脉冲关闭的最短时间,当PID计算得到的脉冲关闭时间小于该值时,该周期内脉冲不关闭。
(3)输出限制值
可以设置PID的输出的上、下限,同时也可以设置当PID发生错误时,“PID_Compact”对错误的响应,如图11-11所示。
①设置输出值的上、下限
输出值的上限:PID输出的最大值,最大为100%。
输出值的下限:PID输出的最小值,最小为-100%。
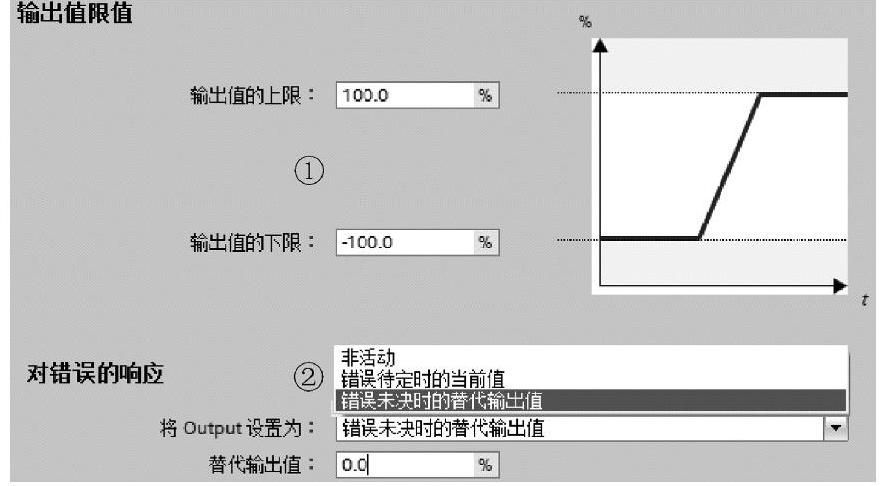
图11-11 PID_Compact输出值限制设置
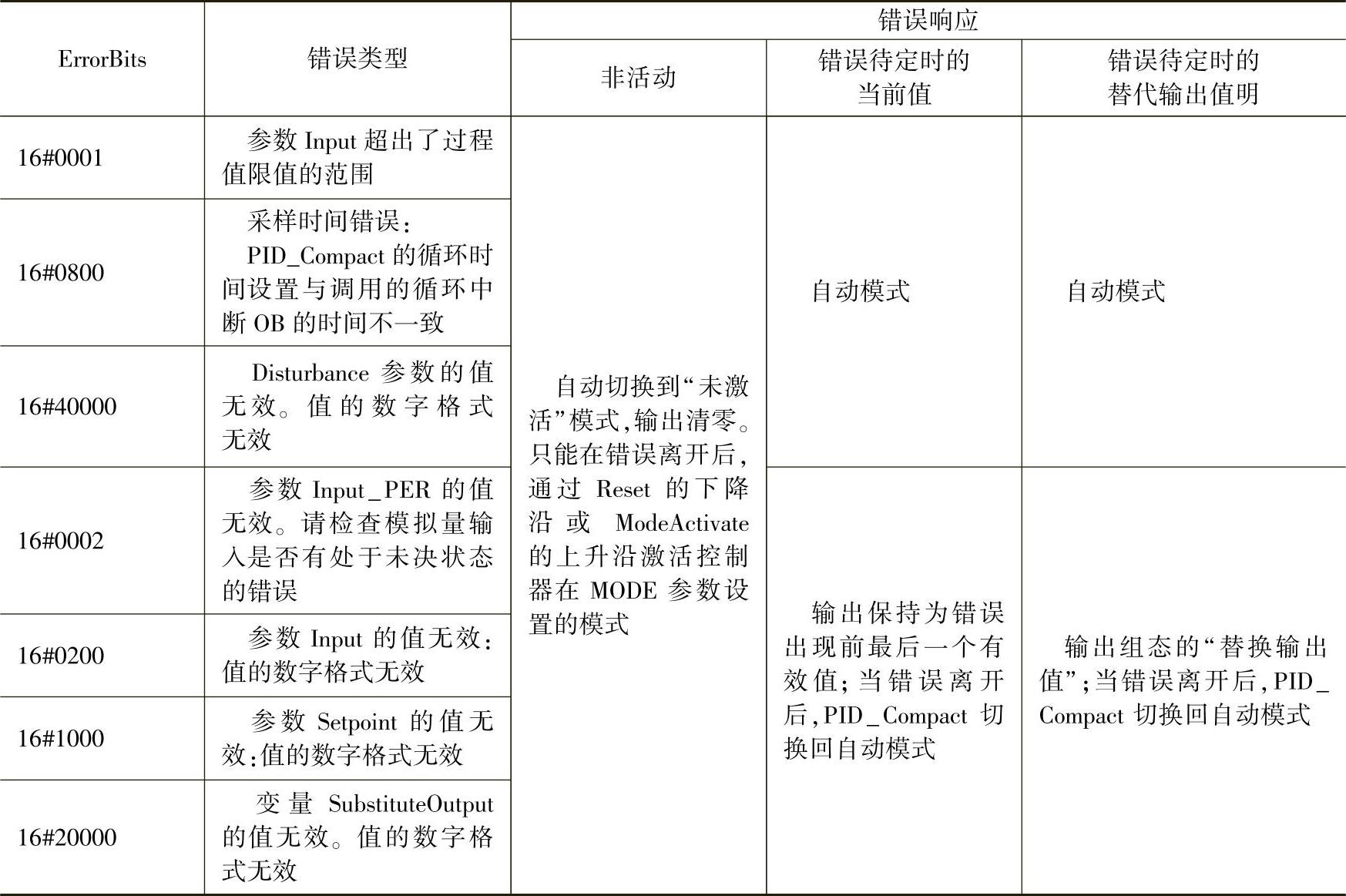
②当发生错误时,PID的响应与此错误响应模式及错误类型有关,见表11-3。
(4)PID参数
可在PID参数选项卡内选择是否手动设置PID参数,及PID的调节规则,如图11-12所示。
①启用PID参数手动输入功能:
“比例增益”:比例参数。
“积分作用时间”:积分时间参数,积分时间越大,积分作用越小。
“微分作用时间”:微分时间参数,微分时间越大,微分作用越小。
表11-3 PID_Compact错误的响应
“微分延迟系数”:用于延迟微分作用,系数越大,微分作用的生效时间延迟越久。
“比例作用权重”:限制设定值变化时的比例作用,设置在0.0~1.0之间。
“微分作用权重”:限制设定值变化时的微分作用,设置在0.0~1.0之间。
“PID算法采样时间”:PID计算输出值时间,必须设置为循环中断的整数倍。
②选择PID调节规则:
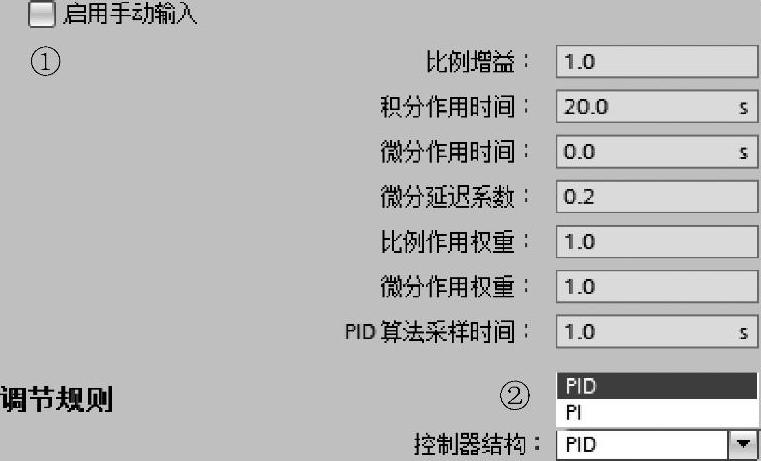
图11-12 PID_CompactPID参数
“PI”:PI调节引入了积分消除了系统的稳态误差。
“PID”:PID调节引入了微分适用于大滞后系统。
注意:
当选择手动输入PID参数时,所修改的参数为初始值而不是当前值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。