



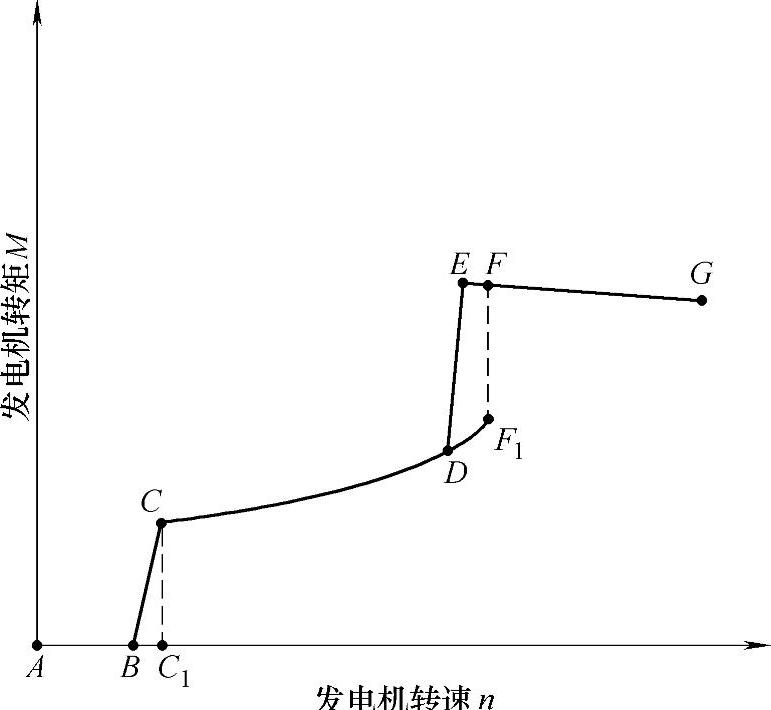
图10-34 机组运行区域示意图
在大型风力发电机组主控系统中,控制策略的设计主要体现在:运行风速范围内,确保系统的稳定运行;低风速时,跟踪最佳叶尖速比,获得最大风能;高风速时,限制风能的捕获,保持机组的输出功率为最大值,并保持输出功率稳定;减小阵风引起的转矩波动峰值,减少风轮的机械应力和输出功率的波动,避免共振;减小功率变化对传动链的暂态响应;主控系统响应快速,对一些输入信号过滤,对一些输出信号限幅。
1.机组运行区域设计
在大型风力发电机组的主控系统控制策略设计中,机组的运行区域如图10-34所示,其中发电机转速-转矩轨迹曲线为A—B—C—D—E—F—G。
主控系统控制策略设计需要将曲线改为A—C1—C—F1—F—G,这样机组的性能会有很大的改善。由于机组会在很宽的风速范围内运行在最优尖速比附近,比同样最大运行转速时吸收更多的能量,而且也可以防止在机组额定点附近桨距控制器频繁动作。当机组在运行低风速风况时,即刚超过切入风速时,控制策略的设计需要使机组运行在接近恒定的转速状态下,此时机组运行更加平稳。
主控系统设计的大型风力发电机组的运行区域设计可以分为五个区域:启动阶段A—C1,恒转速Ⅰ阶段C1—C,最佳叶尖速比阶段C—F1,恒转速Ⅱ阶段F1—F,恒功率阶段F—G。
启动阶段A—C1:这个运行阶段需要通过控制机组变桨距系统对发电机的转速做闭环控制,随着转速的增加,机组从A点运行到C1点。控制目标是发电机并网转速。
恒转速Ⅰ阶段C1—C:这个运行阶段是在并网后额定风速以下,通过对发电机转矩的调节控制发电机的转速在保持在C1点附近,随着转矩的增加,机组从C1点运行到C点。控制目标是C点发电机转速值,随着风速的变大,使机组运行在最佳叶尖速比曲线上。
最佳叶尖速比阶段C—F1:这个运行阶段是在在并网后额定风速以下,为了保持机组在最佳叶尖速比下工作,必须根据风速的变化通过控制发电机转矩来调节发电机转速,随着风速的变大,机组从C点运行到F1点。控制目标是发电机最佳转矩-转速曲线,也就是跟踪最佳叶尖速比,确保风能的最大捕获。
恒转速Ⅱ阶段F1—F:这个运行阶段是随着风速继续变大,保持发电机转速在F点附近,并且F点转速大于额定转速E点。这是考虑到防止转矩控制器和桨距角控制器相互干扰,造成在额定风速以下桨距角控制器频繁动作的情况。随着转矩的增大,机组从F1点运行到F点。控制目标是F点转速,随着风速的变大,机组达到额定功率的附近。
恒功率阶段F—G:这个运行阶段是机组达到额定功率以后,通过对发电机转矩和桨距角的双重调节,保持发电机的功率在额定值附近,利用风轮转速的变化,储存或释放部分能量,限制机组获得的风能,提高传动系统的柔性保证发电机输出功率平稳,避免变桨距频繁动作,获得更多的动态特性。
根据上面的主控系统运行区域的设计,五个阶段之间的转换条件依据图10-35所示的运行区域转换逻辑图:
2.转矩控制器和变桨距控制器设计
根据风力发电机组运行区域的五个阶段的设计,转矩控制器和变桨距控制器需要根据不同运行区域分别来设计。
当机组运行在起动阶段A—C1时,不需要控制转矩,所以不用激活转矩控制器;对于变桨距控制器的设计,输入的是发电机转速反馈值和并网转速的差值,输出是桨距角的设定值。
当机组运行在恒转速Ⅰ阶段C1—C时,对于转矩控制器的设计,输入的是发电机转速反馈值和C点转速差值,输出是发电机转矩的设定值;对于变桨距控制器的设计,桨距角设定值应当为机组运行最小桨距角。
当机组运行在最佳叶尖速比阶段C—F1时,对于转矩控制器的设计,输入的是发电机转速反馈值,输出的是发电机转矩的设定值;对于变桨距控制器的设计,桨距角设定值应当为机组运行最小桨距角。(https://www.xing528.com)
当机组运行在恒转速Ⅱ阶段F1—F时,对于转矩控制器的设计,输入的是发电机转速反馈值和F点转速的差值,输出的是发电机转矩的设定值;对于变桨距控制器的设计,桨距角设定值应当为机组运行最小桨距角。
当机组运行在恒功率阶段F—G时,对于转矩控制器的设计,输入的是发电机转速反馈值,输出的是发电机转矩的设定值;对于变桨距控制器的设计,输入的是发电机转速反馈值和F点转速的差值,输出的是桨距角设定值。
综上所述,大型风力发电机组的主控系统控制策略的核心设计,可以由转矩控制器的设计和变桨距控制器的设计充分体现。
因此,主控系统控制策略的设计针对最佳叶尖速比阶段C—F1运行区域时,转速-转矩最优增益K如式(10-48)所示:
K=πρR5Cp(λ)/2λ3i3 (10-48)
式中 ρ——空气密度;
R——风轮半径;

图10-35 运行区域转换逻辑图
λ——期望的叶尖速比;
Cp(λ)——此叶尖速比时的风能利用系数;
i——齿轮箱速比。
由式(10-52)就可以得出转速和转矩的对应关系,得到转矩的设定值。变桨距控制在额定风速以下主要是维持最大风能的捕捉。
除了上面提到的最佳叶尖速比阶段C—F1,主控系统控制策略的设计主要是通过变化的转矩设定值来响应发电机转速的波动,PI控制器被用来用这种方法维持目标转速。变桨距控制器应用一个双PI控制器来调节变桨距动作。风力发电机组主控系统的控制策略框图如图10-36所示。

图10-36 风力发电机组主控系统控制策略框图
如果机组运行在不同的区域中,主控系统的参数随着区域和阶段的不同也在变化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。